







基于MATLAB的硬约束轨迹优化算法代码学习
本文是在学习路径规划算法中的一篇学习记录,将整个代码进行了详细的梳理,方便后来者参考学习.代码需要和理论部分结合起来看更容易理解,理论部分: 《软约束和硬约束下的轨迹优化-学习记录 》.
(代码注释中英夹杂,英文注释是原来作者的注释,中文注释是本人后来添加的)
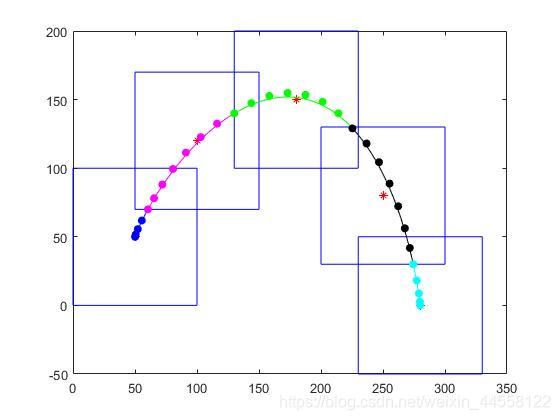
0.结果展示
1.hw_6.m
这部分是主函数部分,主要包括计算和画图。
clc;clear;close all
% 设定v、a、j的限制
v_max = 400;
a_max = 400;
j_max = 100000;
color = ['r', 'b', 'm', 'g', 'k', 'c', 'c'];
%% specify the center points of the flight corridor and the region of corridor
% 设定飞行走廊中心点
path = [50, 50;
100, 120;
180, 150;
250, 80;
280, 0];
% 设定飞行走廊x、y轴的边界
x_length = 100;
y_length = 100;
n_order = 7; % 8 control points n_order = 2*d_order - 1
% 7 = 2*4 -1 minimal snap defferenational order is 4, p,v,a,j must be
% continuous and differentialble, it can provide 2*4 euqtions, so the
% variables can be up to 8
n_seg = size(path, 1);
% 设定每个走廊的相关信息
corridor = zeros(4, n_seg);
for i = 1:n_seg
% 对于每一列而言,前面两个是坐标,后面两个是走廊长宽
corridor(:, i) = [path(i, 1), path(i, 2), x_length/2.0, y_length/2.0]';
end
%% specify ts for each segment
%每一段轨迹的时间分配为1s
ts = zeros(n_seg, 1);
for i = 1:n_seg
ts(i,1) = 1;
end
% 独立对各轴求解
poly_coef_x = MinimumSnapCorridorBezierSolver(1, path(:, 1), corridor, ts, n_seg, n_order, v_max, a_max, j_max);
disp("x axle solved!")
poly_coef_y = MinimumSnapCorridorBezierSolver(2, path(:, 2), corridor, ts, n_seg, n_order, v_max, a_max, j_max);
disp("y axle solved!")
%% display the trajectory and cooridor
plot(path(:,1), path(:,2), '*r'); hold on;
for i = 1:n_seg
plot_rect([corridor(1,i);corridor(2,i)], corridor(3, i), corridor(4,i));hold on;
end
hold on;
%% #####################################################
% STEP 4: draw bezier curve
x_pos = [];y_pos = [];
x_vel = [];y_vel = [];
x_acc = [];y_acc = [];
x_jerk = [];y_jerk = [];
idx = 1;
for j = 1:n_seg
start_pos_id = idx;
for t = 0:0.01:1
x_pos(idx) = 0.0;y_pos(idx) = 0.0;
x_vel(idx) = 0.0;y_vel(idx) = 0.0;
x_acc(idx) = 0.0;y_acc(idx) = 0.0;
x_jerk(idx) = 0.0;y_jerk(idx) = 0.0;
for i = 0:n_order
start_idx = (j-1)*(n_order+1)+i;
basis_p = nchoosek(n_order, i) * t^i * (1-t)^(n_order-i);
x_pos(idx) = x_pos(idx) + poly_coef_x(start_idx+1)*basis_p*ts(j);
y_pos(idx) = y_pos(idx) + poly_coef_y(start_idx+1)*basis_p*ts(j);
if i < n_order
basis_v = nchoosek(n_order-1, i) * t^i *(1-t)^(n_order-1-i);
x_vel(idx) = x_vel(idx) + (n_order+1) * (poly_coef_x(start_idx+2)-poly_coef_x(start_idx+1))*basis_v;
y_vel(idx) = y_vel(idx) + (n_order+1) * (poly_coef_y(start_idx+2)-poly_coef_y(start_idx+1))*basis_v;
end
if i < n_order-1
basis_a = nchoosek(n_order-2, i) * t^i *(1-t)^(n_order-2-i);
x_acc(idx) = x_acc(idx) + (n_order+1) * n_order * (poly_coef_x(start_idx+3) - 2*poly_coef_x(start_idx+2) + poly_coef_x(start_idx+1))*basis_a/ts(j);
y_acc(idx) = y_acc(idx) + (n_order+1) * n_order * (poly_coef_y(start_idx+3) - 2*poly_coef_y(start_idx+2) + poly_coef_y(start_idx+1))*basis_a/ts(j);
end
if i < n_order-2
basis_j = nchoosek(n_order-3, i) * t^i *(1-t)^(n_order-3-i);
x_jerk(idx) = x_jerk(idx) + (n_order+1) * n_order * (n_order-1) * ...
(poly_coef_x(start_idx+4) - 3*poly_coef_x(start_idx+3) + 3*poly_coef_x(start_idx+2) - poly_coef_x(start_idx+1)) * basis_j/ts(j)^2;
y_jerk(idx) = y_jerk(idx) + (n_order+1) * n_order * (n_order-1) * ...
(poly_coef_y(start_idx+4) - 3*poly_coef_y(start_idx+3) + 3*poly_coef_y(start_idx+2) - poly_coef_y(start_idx+1)) * basis_j/ts(j)^2;
end
end
idx = idx + 1;
end
end_pos_id = idx - 1;
scatter(ts(j)*poly_coef_x((j-1)*(n_order+1)+1:(j-1)*(n_order+1)+1+n_order), ts(j)*poly_coef_y((j-1)*(n_order+1)+1:(j-1)*(n_order+1)+1+n_order), 'filled',color(mod(j,7)+1),'LineWidth', 5);hold on;
plot(x_pos(start_pos_id:end_pos_id), y_pos(start_pos_id:end_pos_id), color(mod(j,7)+1));hold on;
end
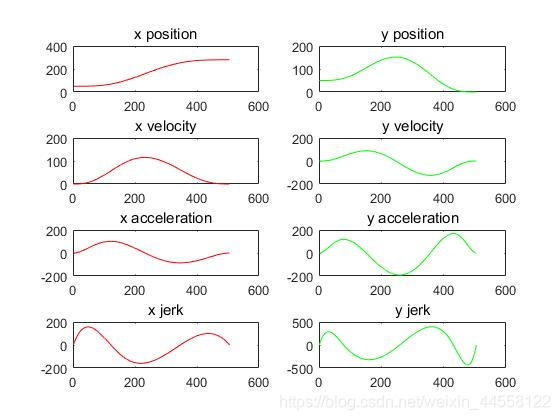
figure(2)
subplot(4,2,1)
plot(x_pos, 'Color', 'r');title('x position');
subplot(4,2,2)
plot(y_pos, 'Color', 'g');title('y position');
subplot(4,2,3)
plot(x_vel, 'Color', 'r');title('x velocity');
subplot(4,2,4)
plot(y_vel, 'Color', 'g');title('y velocity');
subplot(4,2,5)
plot(x_acc, 'Color', 'r');title('x acceleration');
subplot(4,2,6)
plot(y_acc, 'Color', 'g');title('y acceleration');
subplot(4,2,7)
plot(x_jerk, 'Color', 'r');title('x jerk');
subplot(4,2,8)
plot(y_jerk, 'Color', 'g');title('y jerk');
function poly_coef = MinimumSnapCorridorBezierSolver(axis, waypoints, corridor, ts, n_seg, n_order, v_max, a_max, j_max)
start_cond = [waypoints(1), 0, 0, 0];
end_cond = [waypoints(end), 0, 0, 0];
%% #####################################################
% STEP 1: compute Q_0 of c'Q_0c
[Q, M] = getQM(n_seg, n_order, ts);
Q_0 = M'*Q*M;
% 返回和Q矩阵距离最近的一个对称正定(Symmetric Positive Definite)矩阵Q'.
% 目的是在把目标函数微调为一个凸函数,保证得到的解为全局最优解.
Q_0 = nearestSPD(Q_0);
%% #####################################################
% STEP 2: get Aeq and beq
[Aeq, beq] = getAbeq(n_seg, n_order, ts, start_cond, end_cond);
%% #####################################################
% STEP 3: get corridor_range, Aieq and bieq
% STEP 3.1: get corridor_range of x-axis or y-axis,
% you can define corridor_range as [p1_min, p1_max;
% p2_min, p2_max;
% ...,
% pn_min, pn_max ];
corridor_range = zeros(n_seg,2);
for k = 1:n_seg
% 横坐标/纵坐标减去、加上corridor宽度得到x/y轴边界
corridor_range(k,:) = [corridor(axis,k) - corridor(axis+2,k), corridor(axis,k) + corridor(axis+2,k)];
end
% STEP 3.2: get Aieq and bieq
[Aieq, bieq] = getAbieq(n_seg, n_order, corridor_range, ts, v_max, a_max, j_max);
f = zeros(size(Q_0,1),1);
% quadprog函数参数介绍:https://blog.csdn.net/tianzy16/article/details/87916128
poly_coef = quadprog(Q_0,f,Aieq, bieq, Aeq, beq);
end
function plot_rect(center, x_r, y_r)
p1 = center+[-x_r;-y_r];
p2 = center+[-x_r;y_r];
p3 = center+[x_r;y_r];
p4 = center+[x_r;-y_r];
plot_line(p1,p2);
plot_line(p2,p3);
plot_line(p3,p4);
plot_line(p4,p1);
end
function plot_line(p1,p2)
a = [p1(:),p2(:)];
plot(a(1,:),a(2,:),'b');
end
2.getQM.m
获得Q矩阵。
function [Q, M] = getQM(n_seg, n_order, ts)
Q = [];
M = [];
% 因为我们将时间映射到[0,1]区间内,所以这个getM函数可以固化下来
M_k = getM(n_order);
% d_order = 4;
for k = 1:n_seg
%#####################################################
% STEP 2.1 calculate Q_k of the k-th segment
% Q_k = [];
fac = @(x) x*(x-1)*(x-2)*(x-3);
Q_k = zeros(n_order+1,n_order+1);
for i = 0:n_order
for j = 0:n_order
if (i < 4) || (j < 4)
continue;
else
% 也即 i!/(i-4)! * j!/(j-4)! * 1/(i+j-7) * t^(j+i-7)
Q_k(i+1,j+1) = fac(i) * fac(j)/(i + j - 7) * ts(k)^(j+i-7);
end
end
end
Q = blkdiag(Q, Q_k);
M = blkdiag(M, M_k);
end
end
3.getM.m
获得M矩阵。
function M = getM(n_order)
if n_order == 3
M = [ 1 0 0 0;
-3 3 0 0;
3 -6 3 0;
-1 3 -3 1];
elseif n_order == 4 % Degree D = 4
M = [1 0 0 0 0 ;
-4 4 0 0 0 ;
6 -12 6 0 0 ;
-4 12 -12 4 0 ;
1 -4 6 -4 1 ];
elseif n_order == 5 % Degree D = 5
M = [1 0 0 0 0 0
-5 5 0 0 0 0;
10 -20 10 0 0 0;
-10 30 -30 10 0 0;
5 -20 30 -20 5 0;
-1 5 -10 10 -5 1 ];
elseif n_order == 6 % Degree D = 6
M = [1 0 0 0 0 0 0;
-6 6 0 0 0 0 0;
15 -30 15 0 0 0 0;
-20 60 -60 20 0 0 0;
15 -60 90 -60 15 0 0;
-6 30 -60 60 -30 6 0;
1 -6 15 -20 15 -6 1 ];
elseif n_order == 7 % Degree D = 7
M = [ 1 0 0 0 0 0 0 0;
-7 7 0 0 0 0 0 0;
21 -42 21 0 0 0 0 0
-35 105 -105 35 0 0 0 0;
35 -140 210 -140 35 0 0 0;
-21 105 -210 210 -105 21 0 0;
7 -42 105 -140 105 -42 7 0;
-1 7 -21 35 -35 21 -7 1];
elseif n_order == 8 % Degree D = 8
M = [ 1 0 0 0 0 0 0 0 0 ;
-8 8 0 0 0 0 0 0 0;
28 -56 28 0 0 0 0 0 0;
-56 168 -168 56 0 0 0 0 0;
70 -280 420 -280 70 0 0 0 0;
-56 280 -560 560 -280 56 0 0 0;
28 -168 420 -560 420 -168 28 0 0;
-8 56 -168 280 -280 168 -56 8 0;
1 -8 28 -56 70 -56 28 -8 1];
elseif n_order == 9 % Degree D = 9
M = [ 1 0 0 0 0 0 0 0 0 0;
-9 9 0 0 0 0 0 0 0 0;
36 -72 36 0 0 0 0 0 0 0;
-84 252 -252 84 0 0 0 0 0 0;
126 -504 756 -504 126 0 0 0 0 0;
-126 630 -1260 1260 -630 126 0 0 0 0;
84 -504 1260 -1680 1260 -504 84 0 0 0;
-36 252 -756 1260 -1260 756 -252 36 0 0;
9 -72 252 -504 630 -504 252 -72 9 0;
-1 9 -36 84 -126 126 -84 36 -9 1];
end
end
4.getAbeq.m
获得线性等式约束的系数矩阵和右端向量。
function [Aeq, beq] = getAbeq(n_seg, n_order, ts, start_cond, end_cond)
n_all_poly = n_seg*(n_order+1); % 所有控制点多项式系数总和
%#####################################################
% STEP 2.1 p,v,a,j constraint in start
Aeq_start = zeros(4, n_all_poly); % Ascending order
Aeq_start(1,1:4) = [1,0,0,0] * ts(1)^(1);% c0
Aeq_start(2,1:4) = n_order * [-1,1,0,0] * ts(1)^(0);% c'0 = n*(c1 - c0)
Aeq_start(3,1:4) = n_order * (n_order-1) * [1,-2,1,0] * ts(1)^(-1);% c''0 = n*(n-1)*(c2 -2*c1 +c0)
Aeq_start(4,1:4) = n_order * (n_order-1) * (n_order-2) * [1,-3,3,-1] * ts(1)^(-2);% c''0 = n*(n-1)*(n-2)*(c3 - 3*c2 + 3*c1 - c0)
beq_start = start_cond';
%#####################################################
% STEP 2.2 p,v,a,j constraint in end
Aeq_end = zeros(4, n_all_poly); % Descending order
Aeq_end(1,end-3:end) = [1,0,0,0] * ts(end)^(1);% cn
Aeq_end(2,end-3:end) = n_order * [-1,1,0,0] * ts(end)^(0);% c'n-1 = n*(cn -cn-1)
Aeq_end(3,end-3:end) = n_order * (n_order-1) * [1,-2,1,0] * ts(end)^(-1);% c''n-2 = n^2*(n-1)*(cn - 2*cn-1 + cn-2)
Aeq_end(4,end-3:end) = n_order * (n_order-1) * (n_order-2) * [1,-3,3,-1] * ts(end)^(-2);% c''n-3 = n*(n-1)*(n-2)*(cn - 3*cn-1 + 3*cn-2 - c0)
beq_end = end_cond';
%#####################################################
% STEP 2.3 position continuity constrain between 2 segments
Aeq_con_p = zeros(n_seg-1, n_all_poly); % n_seg-1:轨迹段数
d = 0; % 导数阶数
for k = 1:n_seg-1
Aeq_con_p(k,k*(n_order+1)) = 1 * ts(k)^(1-d);
Aeq_con_p(k,k*(n_order+1)+1) = -1 * ts(k+1)^(1-d);
end
beq_con_p = zeros(n_seg-1,1);
%#####################################################
% STEP 2.4 velocity continuity constrain between 2 segments
Aeq_con_v = zeros(n_seg-1, n_all_poly);
d = 1;
for k = 1:n_seg-1 % (c(n))- c(n-1)) segment 1 + (-c1 + c0) segment 2
Aeq_con_v(k,k*(n_order+1)-1:k*(n_order+1)) = [-1, 1] * ts(k)^(1-d);
Aeq_con_v(k,k*(n_order+1)+1:k*(n_order+1)+2) = [1, -1] * ts(k+1)^(1-d);
end
beq_con_v = zeros(n_seg-1,1);
%#####################################################
% STEP 2.5 acceleration continuity constrain between 2 segments
Aeq_con_a = zeros(n_seg-1, n_all_poly);
d = 2;
for k = 1:n_seg-1 % (c(n))- 2*c(n-1) + c(n-2)) segment 1 + (-c2 + 2*c1 - c0) segment 2
Aeq_con_a(k,k*(n_order+1)-2:k*(n_order+1)) = [1, -2, 1] * ts(k)^(1-d);
Aeq_con_a(k,k*(n_order+1)+1:k*(n_order+1)+3) = [-1, 2, -1] * ts(k+1)^(1-d);
end
beq_con_a = zeros(n_seg-1,1);
%#####################################################
% STEP 2.6 jerk continuity constrain between 2 segments
Aeq_con_j = zeros(n_seg-1, n_all_poly);
d = 3;
for k = 1:n_seg-1 % (c(n))- 3*c(n-1) + 3*c(n-2) - c(n-3)) segment 1 + (-c3 + 3*c2 - 3*c1 + c0) segment 2
Aeq_con_j(k,k*(n_order+1)-3:k*(n_order+1)) = [1, -3, 3, -1] * ts(k)^(1-d);
Aeq_con_j(k,k*(n_order+1)+1:k*(n_order+1)+4) = [-1, 3, -3, 1] * ts(k+1)^(1-d);
end
beq_con_j = zeros(n_seg-1,1);
%#####################################################
% combine all components to form Aeq and beq
Aeq_con = [Aeq_con_p; Aeq_con_v; Aeq_con_a; Aeq_con_j];
beq_con = [beq_con_p; beq_con_v; beq_con_a; beq_con_j];
Aeq = [Aeq_start; Aeq_end; Aeq_con];
beq = [beq_start; beq_end; beq_con];
end
5.getAbieq.m
获得线性不等式约束的系数矩阵和右端向量。
function [Aieq, bieq] = getAbieq(n_seg, n_order, corridor_range, ts, v_max, a_max, j_max)
n_all_poly = n_seg*(n_order+1);
%#####################################################
% STEP 3.2.1 p constraint
% 安全性约束
coeff_p = ones(n_all_poly,1);
bieq_p = [];
for k = 1:n_seg % max
% 这个没有完全理解为什么要这么构造?
coeff_p(1 + (k-1)*(n_order+1):k*(n_order+1)) = coeff_p(1 + (k-1)*(n_order+1):k*(n_order+1)) * ts(k)^(1);
% 放入上边界
bieq_p = [bieq_p;ones(n_order+1,1)*corridor_range(k,2)];
end
for k = 1:n_seg % -min
% 放入下边界
bieq_p = [bieq_p;ones(n_order+1,1)*corridor_range(k,1)*(-1)];
end
Aieq_p = diag(coeff_p,0);
Aieq_p = [Aieq_p;-Aieq_p];
%#####################################################
% STEP 3.2.2 v constraint
% 动力学约束: v
n_ctr = n_order; % the number of control posints after first deferention: n_order
n_eq = n_ctr*n_seg*2; % number of equations (max and min constraints)
Aieq_v = zeros(n_eq/2,n_all_poly);
for k = 1:n_seg
for n = 1:n_ctr
index_col = k*(n_order+1)-1;
index_row = n+(k-1)*n_ctr;
Aieq_v(index_row,index_col:index_col+1) = n_order * [-1, 1] * ts(k)^(0);
end
end
Aieq_v = [Aieq_v;-Aieq_v];
bieq_v = ones(n_eq,1)* v_max;
% bieq_v = ones(n_eq/2,1)* v_max;
%#####################################################
% STEP 3.2.3 a constraint
% 动力学约束: a
n_ctr = n_order-1; % the number of control posints after second deferention: n_order - 1
n_eq = n_ctr*n_seg*2; % number of equations (max and min constraints)
Aieq_a = zeros(n_eq/2, n_all_poly);
for k = 1:n_seg
for n = 1:n_ctr
index_col = k*(n_order+1)-2;
index_row = n+(k-1)*n_ctr;
Aieq_a(index_row,index_col:index_col+2) = n_order * (n_order-1) * [1, -2, 1] * ts(k)^(-1);
end
end
Aieq_a = [Aieq_a;-Aieq_a];
bieq_a = ones(n_eq,1)*a_max;
% bieq_a = ones(n_eq/2,1)*a_max;
% STEP 3.2.4 j constraint
n_ctr = n_order-2; % the number of control posints after third deferention: n_order - 2
n_eq = n_ctr*n_seg*2; % number of equations (max and min constraints)
Aieq_j = zeros(n_eq/2, n_all_poly);
for k = 1:n_seg
for n = 1:n_ctr
index_col = k*(n_order+1)-3;
index_row = n+(k-1)*n_ctr;
Aieq_j(index_row,index_col:index_col+3) = n_order * (n_order-1) * (n_order-2) * [1, -3, 3, -1] * ts(k)^(-2);
end
end
Aieq_j = [Aieq_j;-Aieq_j];
bieq_j = ones(n_eq,1)*j_max;
%#####################################################
% combine all components to form Aieq and bieq
Aieq = [Aieq_p; Aieq_v; Aieq_a; Aieq_j];
bieq = [bieq_p; bieq_v; bieq_a; bieq_j];
% Aieq = Aieq_p;
% bieq = bieq_p;
end
6.参考引用
1.理论:深蓝学院<<移动机器人运动规划>>;
2.代码:https://github.com/KailinTong/Motion-Planning-for-Mobile-Robots/tree/master/hw_6














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









