



参考教程
搜索关键词:stm32cube 定时器 比较中断
配置定时器比较中断的教程
https://www.cnblogs.com/wenhao-Web/p/13816833.html
解决首次打开定时器就进入中断的方法
https://blog.csdn.net/Robotzzg/article/details/90712340
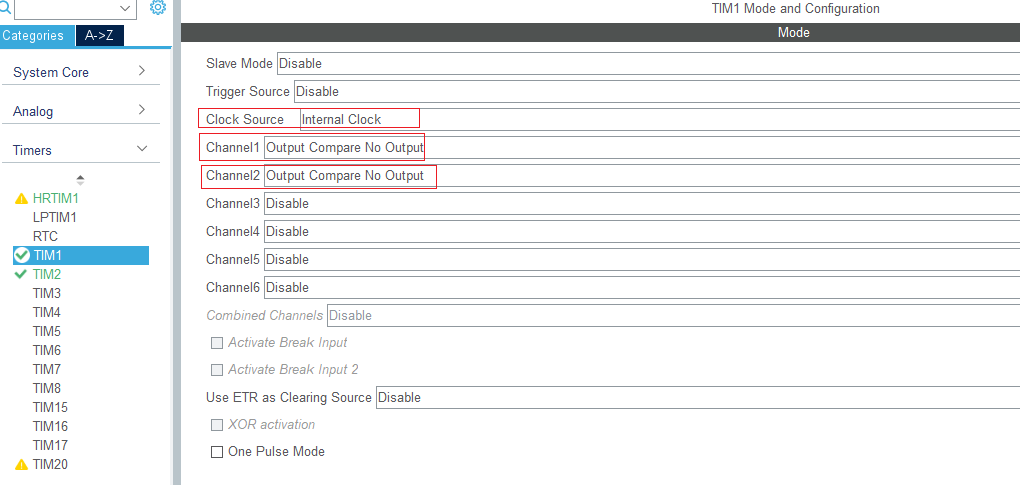
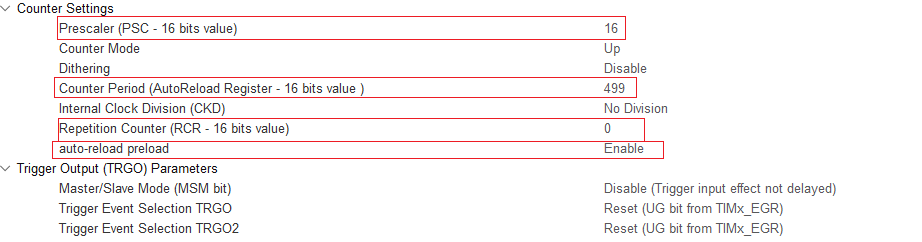
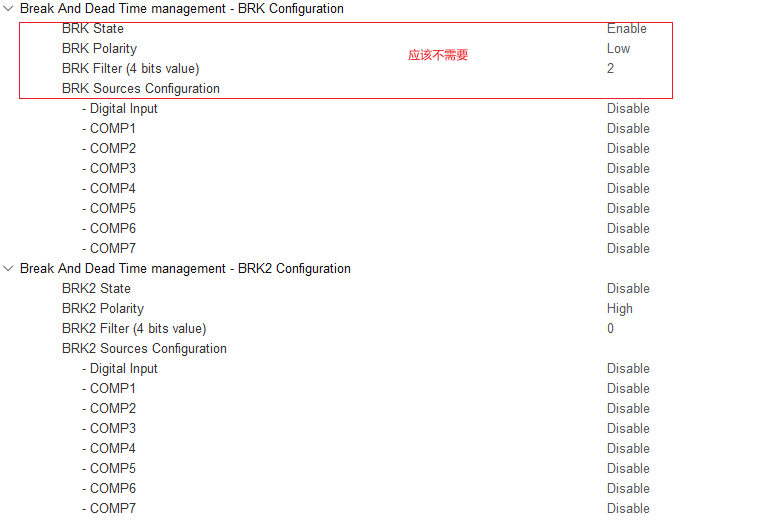
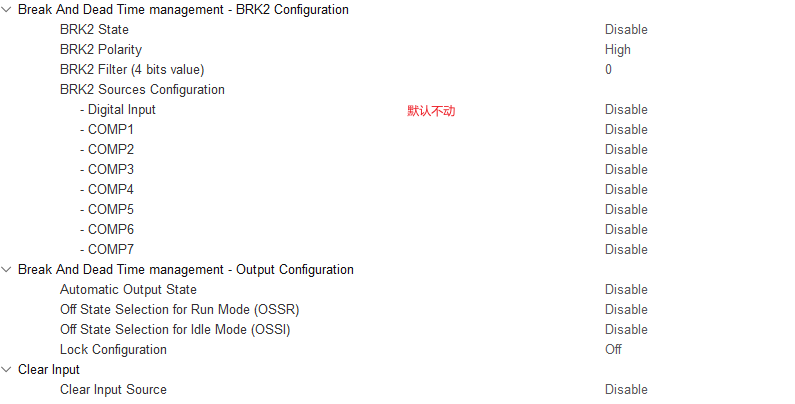
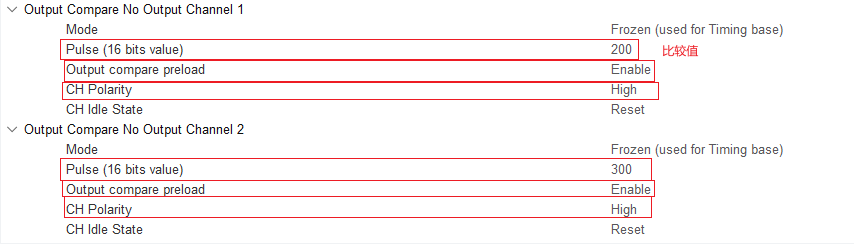
CUBE配置

相关代码
精简中断入口函数
//stm32g4xx_hal_tim.c中
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim)
{
/* Capture compare 1 event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC1) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC1) != RESET)
{
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC1);
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_1;
/* Input capture event */
if ((htim->Instance->CCMR1 & TIM_CCMR1_CC1S) != 0x00U)
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->IC_CaptureCallback(htim);
#else
HAL_TIM_IC_CaptureCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
/* Output compare event */
else
{
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->OC_DelayElapsedCallback(htim);
htim->PWM_PulseFinishedCallback(htim);
#else
HAL_TIM_OC_DelayElapsedCallback(htim);
HAL_TIM_PWM_PulseFinishedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
htim->Channel = HAL_TIM_ACTIVE_CHANNEL_CLEARED;
}
}
}
/* TIM Update event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_UPDATE);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim);
#else
HAL_TIM_PeriodElapsedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
}
初始化函数
HAL_TIM_Base_Start_IT(&htim1);
//上面那个函数打开就会让定时器进中断
//需要用到下面函数去清标志位才能避免进入首次打开进入中断
__HAL_TIM_CLEAR_FLAG(&htim7, TIM_SR_UIF);//添加这条语句解决问题
//htim7.Instance->SR = 0; //这是另一种解决办法
HAL_TIM_OC_Start_IT(&htim1, TIM_CHANNEL_1);
HAL_TIM_OC_Start_IT(&htim1, TIM_CHANNEL_2);
中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim1)
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_2);
}
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_5, GPIO_PIN_RESET);
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_5, GPIO_PIN_SET);
}
}
修改函数
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 50);
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 400);
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 50);
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 400);
HAL_Delay(1000);
//__HAL_TIM_SET_AUTORELOAD(__HANDLE__, __AUTORELOAD__)//这个可能是修改重装载值的
__HAL_TIM_SET_COUNTER(__HANDLE__, __COUNTER__) ((__HANDLE__)->Instance->CNT = (__COUNTER__))
正确的tim初始化避免首次中断
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 36000-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 10000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
//清理TIM开启时的中断标识
__HAL_TIM_CLEAR_IT(&htim2, TIM_IT_UPDATE);//生成会清除
//使能TIM中断
HAL_TIM_Base_Start_IT(&htim2);
}

















 444
444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









