






 本文介绍了如何通过MT6835编码器驱动程序进行寄存器读取操作,包括使用SPI和UART通信,以及执行CRC校验确保数据准确性。重点展示了如何正确顺序读取寄存器获取角度值并处理精度问题。
本文介绍了如何通过MT6835编码器驱动程序进行寄存器读取操作,包括使用SPI和UART通信,以及执行CRC校验确保数据准确性。重点展示了如何正确顺序读取寄存器获取角度值并处理精度问题。
参考资料
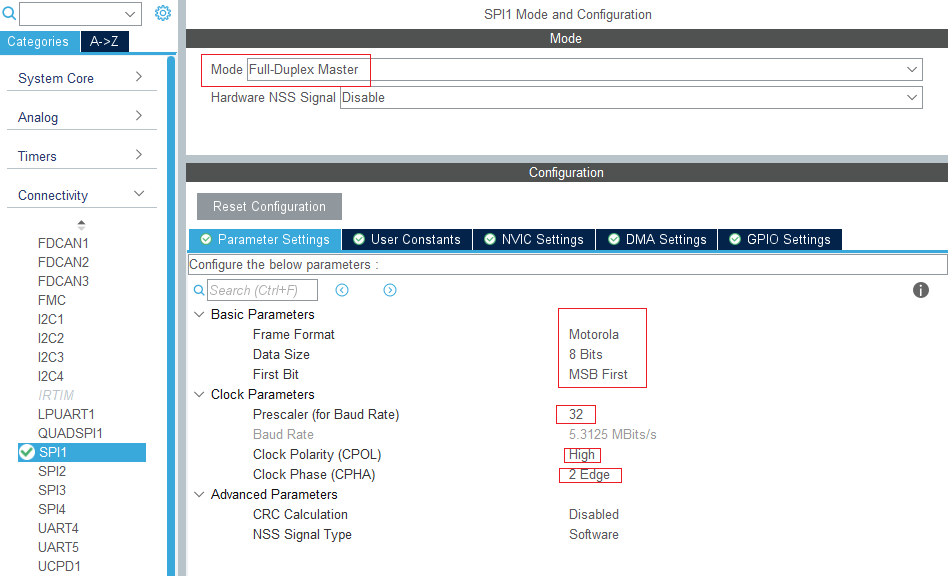
CUBE配置
相关代码
uint8_t str[200],recv_buff[20],send_buff[20]={0},cmd1[3]={0x30,0x03,0xff},cmd2[3]={0x30,0x04,0xff},cmd3[3]={0x30,0x05,0xff};
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);
HAL_UART_Transmit(&huart1,(unsigned char*)&send_buff[2],1, 0xffff);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1,(unsigned char *)cmd2,(unsigned char *)send_buff,3, 100);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);
HAL_UART_Transmit(&huart1,(unsigned char*)&send_buff[2],1, 0xffff);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1,(unsigned char *)cmd3,(unsigned char *)send_buff,3, 100);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);
HAL_UART_Transmit(&huart1,(unsigned char*)&send_buff[2],1, 0xffff);
/**
* @file bsp_encoder.c
* @version 0.1.0
* @date August 2022
* @author yongweixia
*
* @brief
* 编码器角度寄存器读写接口
*
* @copyright (c) 2022 HYZY
*/
#include "driver_encoder.h"
//#include "bsp_spi.h"
//#include "bsp_gpio.h"
#include "stdio.h"
#include "stdlib.h"
#include "main.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
//#include "schedul_task.h"
#ifdef __cplusplus
extern "C" {
#endif
#define READCOMMAND 0x3000
/* CRC校验查表,公式:X8+X2+X+1 */
static uint8_t Crc8Table[256]=
{
0x00,0x07,0x0e,0x09,0x1c,0x1b,0x12,0x15,0x38,0x3f,0x36,0x31,0x24,0x23,0x2a,0x2d,
0x70,0x77,0x7e,0x79,0x6c,0x6b,0x62,0x65,0x48,0x4f,0x46,0x41,0x54,0x53,0x5a,0x5d,
0xe0,0xe7,0xee,0xe9,0xfc,0xfb,0xf2,0xf5,0xd8,0xdf,0xd6,0xd1,0xc4,0xc3,0xca,0xcd,
0x90,0x97,0x9e,0x99,0x8c,0x8b,0x82,0x85,0xa8,0xaf,0xa6,0xa1,0xb4,0xb3,0xba,0xbd,
0xc7,0xc0,0xc9,0xce,0xdb,0xdc,0xd5,0xd2,0xff,0xf8,0xf1,0xf6,0xe3,0xe4,0xed,0xea,
0xb7,0xb0,0xb9,0xbe,0xab,0xac,0xa5,0xa2,0x8f,0x88,0x81,0x86,0x93,0x94,0x9d,0x9a,
0x27,0x20,0x29,0x2e,0x3b,0x3c,0x35,0x32,0x1f,0x18,0x11,0x16,0x03,0x04,0x0d,0x0a,
0x57,0x50,0x59,0x5e,0x4b,0x4c,0x45,0x42,0x6f,0x68,0x61,0x66,0x73,0x74,0x7d,0x7a,
0x89,0x8e,0x87,0x80,0x95,0x92,0x9b,0x9c,0xb1,0xb6,0xbf,0xb8,0xad,0xaa,0xa3,0xa4,
0xf9,0xfe,0xf7,0xf0,0xe5,0xe2,0xeb,0xec,0xc1,0xc6,0xcf,0xc8,0xdd,0xda,0xd3,0xd4,
0x69,0x6e,0x67,0x60,0x75,0x72,0x7b,0x7c,0x51,0x56,0x5f,0x58,0x4d,0x4a,0x43,0x44,
0x19,0x1e,0x17,0x10,0x05,0x02,0x0b,0x0c,0x21,0x26,0x2f,0x28,0x3d,0x3a,0x33,0x34,
0x4e,0x49,0x40,0x47,0x52,0x55,0x5c,0x5b,0x76,0x71,0x78,0x7f,0x6a,0x6d,0x64,0x63,
0x3e,0x39,0x30,0x37,0x22,0x25,0x2c,0x2b,0x06,0x01,0x08,0x0f,0x1a,0x1d,0x14,0x13,
0xae,0xa9,0xa0,0xa7,0xb2,0xb5,0xbc,0xbb,0x96,0x91,0x98,0x9f,0x8a,0x8d,0x84,0x83,
0xde,0xd9,0xd0,0xd7,0xc2,0xc5,0xcc,0xcb,0xe6,0xe1,0xe8,0xef,0xfa,0xfd,0xf4,0xf3,
};
/*!
* @brief CRC校验:X8+X2+X+1
* @return CRC校验值
*/
static uint8_t Crc_Table(uint8_t *ptr, uint8_t len)
{
uint8_t crc=0x00; //计算的初始crc值,也存放结果
while(len--)
{
crc ^= *ptr++; //每次先与需要计算的数据异或,计算完指向下一数据
crc = Crc8Table[crc];
}
return (crc);
}
/*!
* @brief 单字节读取编码器寄存器
* @param add:寄存器地址
* @return 相应寄存器值
*/
uint8_t ReadMT6835(uint16_t add)
{
uint8_t pTxData[3]={0,0,0},pRxData[3]={0,0,0};
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);//0011 0000 0000 0011
add=((add&0x0FFF)|READCOMMAND);
pTxData[0]=(uint8_t)(add>>8);
pTxData[1]=(uint8_t)(add>>0);
pTxData[2]=(uint8_t)(add>>0);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1,(unsigned char *)pTxData,(unsigned char *)pRxData,3, 100);
// spi1_transmit_receive(pTxData, pRxData, 3, 0xffff);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);
return(pRxData[2]);
}
/*!
* @brief 读取编码器角度
* @return 角度值
*/
//int8_t Zero_Cross_Valid = 0;
//int8_t Direction_Of_Rotation = 0;
//int8_t Large_Or_Small = 0;
//int8_t Counter1 = 0;
//int8_t Counter2 = 0;
//int8_t Counter3 = 0;
int32_t MT6835_Angle = 0;
uint32_t ReadMT6835_Angle(void)
{
uint8_t MT6835Register[4] = {0,0,0,0};
//int32_t Temp_MT6835_Angle_New = 0;
//int32_t Temp_MT6835_Angle_Last = 0;
//Counter2++;
MT6835Register[0] = ReadMT6835(0x03);
MT6835Register[1] = ReadMT6835(0x04);
MT6835Register[2] = ReadMT6835(0x05);
MT6835Register[3] = ReadMT6835(0x06);
/* 举例:以总结规律(以计算5个角度值的平均数为例)
* 15 + 10 + 5 + 0 + 355 = 385 - 1 * 360 = 25 / 5 = 5
* 10 + 5 + 0 + 355 + 350 = 720 - 2 * 360 = 0 / 5 = 0
* 5 + 0 + 355 + 350 + 345 = 1055 - 3 * 360 = -25 / 5 = -5 + 360 = 355
* 340 + 355 + 10 + 25 + 40 = 770 - 2 * 360 = 50 / 5 = 10
* 355 + 10 + 25 + 40 + 55 = 485 - 1 * 360 = 125 / 5 = 25
* 345 + 350 + 355 + 360 + 5 = 1415 - 4 * 360 = -25 / 5 = -5 + 360 = 355 */
if(Crc_Table(&MT6835Register[0],3) == MT6835Register[3])
{
//Counter1++;
//if(Counter1 <= 16)
//{
MT6835_Angle = ((MT6835Register[0]<<13)|(MT6835Register[1]<<5)|(MT6835Register[2]>>3));
// Temp_MT6835_Angle_New = ((MT6835Register[0]<<13)|(MT6835Register[1]<<5)|(MT6835Register[2]>>3));
// if(Counter1 == 1)
// {
// MT6835_Angle = MT6835_Angle + Temp_MT6835_Angle_New;
// }
// else
// {
// if(((abs(Temp_MT6835_Angle_New - Temp_MT6835_Angle_Last)) > 1048576))
// {
// if(Temp_MT6835_Angle_New < Temp_MT6835_Angle_Last)
// { //逆时针旋转
// Counter3 = Counter1 - 1;
// }
// else
// { //顺时针旋转
// Counter3 = 16 - (Counter1 - 1);
// }
// MT6835_Angle = MT6835_Angle + Temp_MT6835_Angle_New;
// }
// else
// {
// MT6835_Angle = MT6835_Angle + Temp_MT6835_Angle_New;
// }
// }
// if(Counter1 == 16)
// {
// MT6835_Angle = (MT6835_Angle - Counter3 * 360) >> 4; //右移4位相当于除以16求平均数
// if(MT6835_Angle < 0)
// {
// MT6835_Angle = MT6835_Angle + 360;
// }
// else
// {
// ;
// }
// Control.MT6835_Angle_q31t = MT6835_Angle;
// }
// else
// {
// ;
// }
//}
//else
//{
// ;
//}
}
//else
//{
// ;
//}
//if(Counter2 == 20)
//{
// Zero_Cross_Valid = 0;
// Direction_Of_Rotation = 0;
// Large_Or_Small = 0;
// Counter1 = 0;
// Counter2 = 0;
// Counter3 = 0;
// MT6835_Angle = 0;
//}
//else
//{
// ;
//}
//Temp_MT6835_Angle_Last = Temp_MT6835_Angle_New;
return(MT6835_Angle);
}
#ifdef __cplusplus
}
#endif
/**
* @file bsp_encoder.h
* @version 0.1.0
* @date August 2022
* @author yongweixia
*
* @brief
* 编码器角度寄存器读写接口
*
* @copyright (c) 2022 HYZY
*/
#ifndef __DRIVER_ENCODER_H__
#define __DRIVER_ENCODER_H__
#include "stdint.h"
#ifdef __cplusplus
extern "C" {
#endif
/*!
* @brief 单字节读取编码器寄存器
* @param add:寄存器地址
* @return 相应寄存器值
*/
uint8_t ReadMT6835(uint16_t add);
/*!
* @brief 读取编码器角度
* @return 角度值
*/
uint32_t ReadMT6835_Angle(void);
#ifdef __cplusplus
}
#endif
#endif //__DRIVER_ENCODER_H__
使用经验
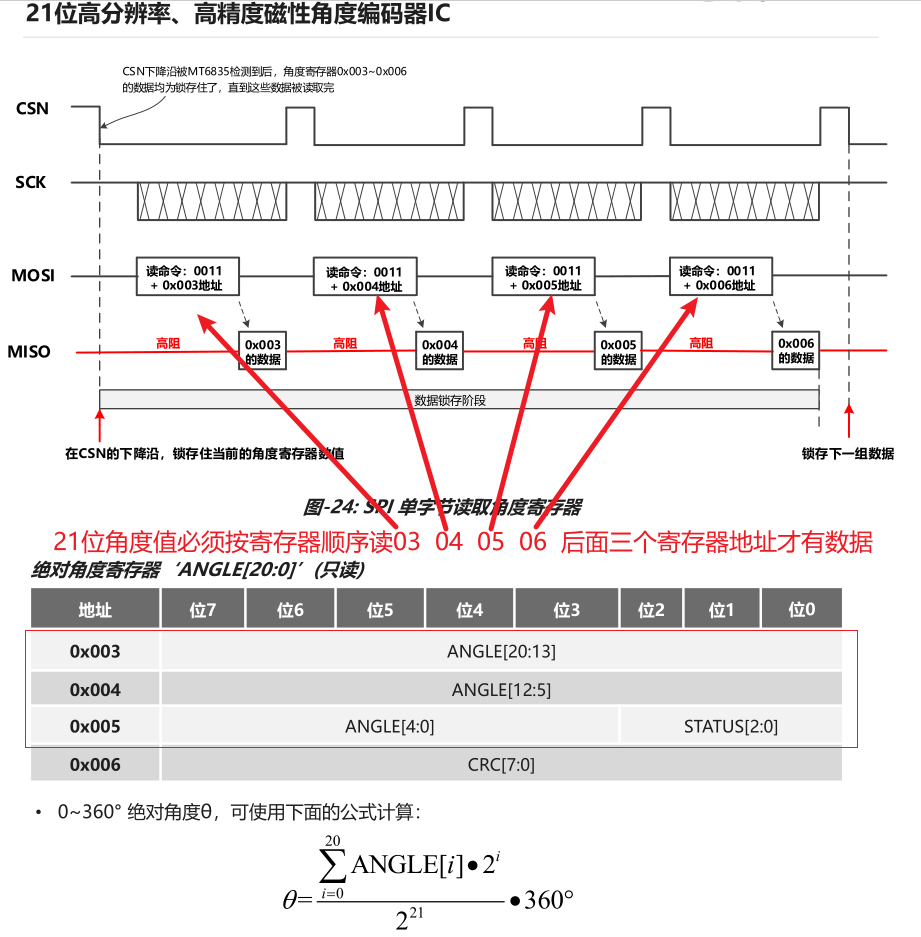
这个芯片有点坑,不,很坑,浪费我一下午时间。一定要先读寄存器地址0x03然后0x04 0x05 0x06后面三个地址才有数据
如果直接读0x04地址,没有数据,读的结果时00.如果0x03 0x05 或者0x03 0x03 0x04读的都是00
一定严格按照顺序读寄存器地址
uint32_t MT6835_Angle;
MT6835_Angle = ((MT6835Register[0]<<13)|(MT6835Register[1]<<5)|(MT6835Register[2]>>3));
读出来的数据后面几位是小数点后的数据,要右移三位才能得到一个整形数。这个整形数/2的21次方*360度得到的结果是真正的角度值

















 1375
1375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









