







文章目录
一、几类典型信号
1.1 连续时间和离散时间的指数信号
【
P
a
r
t
1
Part 1
Part1】:连续时间
首先,表达式就是:
x
(
t
)
=
C
e
a
t
x(t) = Ce^{at}
x(t)=Ceat,其中,C 和 a 都可以是复数。下面我们先从实指数信号入手:
这一点,我们并不陌生,如果我们把 C 取成 1 ,那么信号就变为: y = e a t y=e^{at} y=eat,对于这个信号,当 a > 0 a>0 a>0时,是单调递增的; a < 0 a<0 a<0 时单调递减。
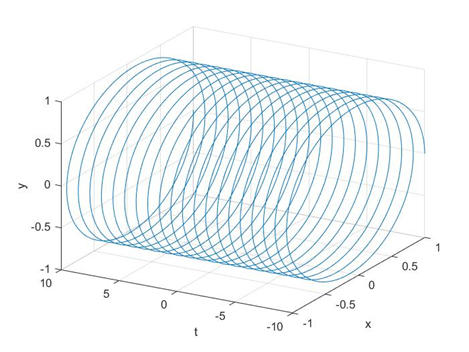
那么接着,我们扩大到复指数信号,如果还是令 C=1,但令 a = j ω 0 a = jω_0 a=jω0,那么 x ( t ) = e j ω 0 t x(t) = e^{jω_0t} x(t)=ejω0t。这是一个周期性复指数信号,为什么呢?我们从三个角度来看看:
- 根据欧拉公式: x ( t ) = e j ω 0 t = c o s ( ω 0 t ) + j s i n ( ω 0 t ) x(t) = e^{jω_0t} = cos(ω_0t) + jsin(ω_0t) x(t)=ejω0t=cos(ω0t)+jsin(ω0t),那么, c o s ( ω 0 t ) cos(ω_0t) cos(ω0t) 和 s i n ( ω 0 t ) sin(ω_0t) sin(ω0t) 都是周期信号,周期信号加周期信号依然是周期信号,对吧
- 我们从严谨的角度证明:假设 x ( t ) x(t) x(t) 是周期信号,那么就有: x ( t ) = x ( t + T ) x(t) = x(t+T) x(t)=x(t+T),对于 x ( t + T ) = e j ω 0 ( t + T ) = e j ω 0 t e j ω 0 T = x ( t ) x(t+T) = e^{jω_0(t+T)} = e^{jω_0t}e^{jω_0T} = x(t) x(t+T)=ejω0(t+T)=ejω0tejω0T=x(t) ,那应有: e j ω 0 T = 1 e^{jω_0T} = 1 ejω0T=1,根据复变函数的知识, e j 2 k π = 1 e^{j2kπ} = 1 ej2kπ=1,故应有: ω 0 T = 2 k π ω_0T = 2kπ ω0T=2kπ,所以当 T = 2 k π ω 0 T = \frac{2kπ}{ω_0} T=ω02kπ 时, x ( t ) x(t) x(t) 是周期信号,而我们发现 T 可以取任何实数,也就是说 x ( t ) x(t) x(t) 就是一个周期信号。
- 我们可以把 x ( t ) = e j ω 0 t x(t) = e^{jω_0t} x(t)=ejω0t 的图像画一下看看效果:
【
P
a
r
t
2
Part 2
Part2】:离散时间
对于离散时间的指数信号,我们这样表示:
x
[
n
]
=
C
α
n
x[n] = Cα^n
x[n]=Cαn(其中,C,α 可以是复数)
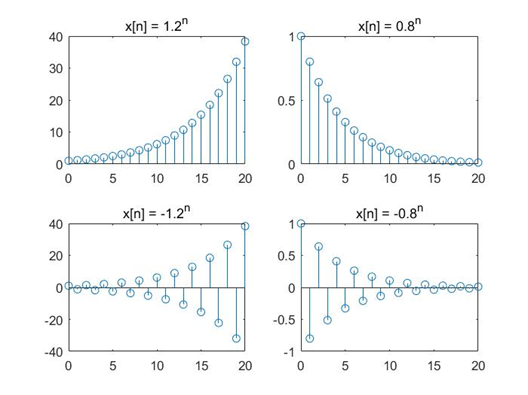
同样地,我们先来分析一下实指数信号。大家注意:离散时间信号的单调性和连续时间是不一样的,当 α > 1时单调递增、0 < α < 1 时单调递减、α<-1时震荡地增大 、-1<α<0 时震荡地减小
我们看看效果图:
好的,现在我们知道实指数下连续时间信号和离散时间信号的单调性的区别了,下面我们看看离散时间下的复指数信号是不是都是周期的呢??
对于复指数信号,我们也是设:
x
[
n
]
=
e
j
ω
0
n
x[n] = e^{jω_0n}
x[n]=ejω0n
类似地,我们假设存在这样一个周期 N,有:
x
[
n
]
=
x
[
n
+
N
]
x[n] = x[n+N]
x[n]=x[n+N],即:
x
[
n
+
N
]
=
e
j
ω
0
(
n
+
N
)
=
e
j
ω
0
n
e
j
ω
0
N
x[n+N] = e^{jω_0(n+N)} = e^{jω_0n}e^{jω_0N}
x[n+N]=ejω0(n+N)=ejω0nejω0N,所以应有:
e
j
ω
0
N
=
1
e^{jω_0N} = 1
ejω0N=1,根据之前的推论,我们有:
N
=
2
m
π
ω
0
N = \frac{2mπ}{ω_0}
N=ω02mπ,现在问题来了:我们知道离散时间信号的横坐标都是整数!所以周期 N 应该也是整数才对,可是这里有一个
π
π
π,所以这就要求
ω
0
ω_0
ω0 应该有个
π
π
π,这样N才有可能是整数
所以离散时间的复指数信号不一定是周期函数!下图说明:
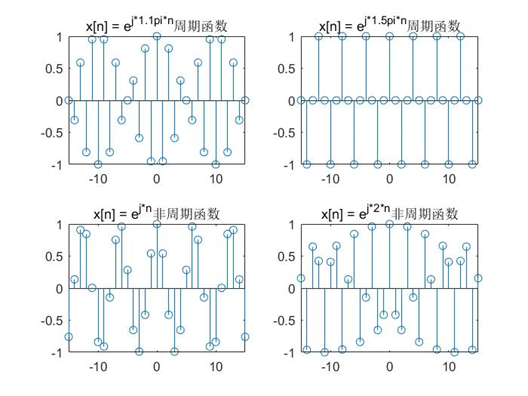
另外,在计算离散时间复指数信号的基波周期时,需要先把 m m m 带上,因为 2 π 2π 2π 除以 ω 0 ω_0 ω0 得到的不一定是整数(虽然 π π π 抵消掉了),可能是分数,所以需要有一个 m 将N 变成整数
1.2 连续时间和离散时间的正弦信号
这里关于连续时间的正弦信号就不写了,基本没啥问题。主要是在于离散时间信号下的正弦信号。
注意: 离散时间的正弦信号不一定是周期的!!
比如
x
[
n
]
=
c
o
s
(
ω
0
n
)
x[n] = cos(ω_0n)
x[n]=cos(ω0n),只有当
2
Π
ω
0
\frac{2Π}{ω_0}
ω02Π 是整数时,这个信号才是周期的
1.3 连续时间和离散时间的单位冲激信号和单位阶跃信号
【
P
a
r
t
1
Part 1
Part1】:离散时间
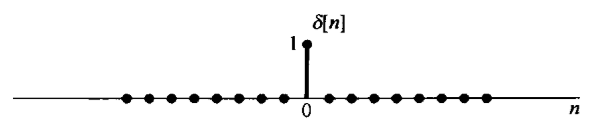
我们先看看离散时间下单位冲激函数的定义:
δ
[
n
]
=
{
1
,
n
=
0
0
,
n
≠
0
δ[n]= \begin{cases} 1, n=0\\ 0, n≠0 \end{cases}
δ[n]={1,n=00,n=0
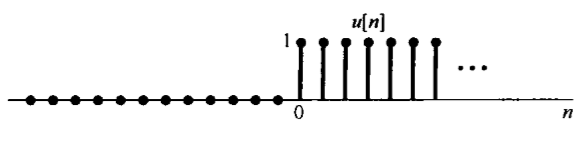
再来看看单位阶跃函数的定义: u [ n ] = { 1 , n ≥ 0 0 , n < 0 u[n]= \begin{cases} 1,n≥0\\ 0,n<0\\ \end{cases} u[n]={1,n≥00,n<0
下面,我们重点分析一下这两个函数的关系:
首先,从
u
[
n
]
u[n]
u[n] 的角度,
δ
[
n
]
δ[n]
δ[n] 可以看成是
u
[
n
]
u[n]
u[n] 的一阶差分:
δ
[
n
]
=
u
[
n
]
−
u
[
n
−
1
]
δ[n] = u[n] - u[n-1]
δ[n]=u[n]−u[n−1]
而反过来,从 δ [ n ] δ[n] δ[n] 的角度,我们也可以得到: u [ n ] = ∑ k = 0 ∞ δ [ n − k ] = ∑ k = − ∞ n δ [ k ] u[n] = \sum_{k=0}^{∞}δ[n-k] = \sum_{k=-∞}^{n}δ[k] u[n]=k=0∑∞δ[n−k]=k=−∞∑nδ[k]
我们下面来解释一下:对于上式的第一个等号,应该很好理解,就是一个 δ [ n ] δ[n] δ[n] 函数不断右移累加的过程,那么第二个等号呢?
这时,我们要记住一点:此时的横轴依然是 n 轴,而 k 只是 n 轴上的一点,这时假设 n < 0,那么自变量从 k 一直取到 n 都是 0,那么累加的结果也就是0(得到:n < 0时,结果=0);如果 n> 0,那么结果中始终有1,得到(n > 0时,结果=1)。这正好满足单位阶跃函数的定义。
如下图所示:

【
P
a
r
t
2
Part 2
Part2】连续时间
这里,我们先定义一下连续时间的单位阶跃函数:
u
(
t
)
=
{
0
,
t
<
0
1
,
t
>
0
u(t) = \begin{cases} 0, t <0\\ 1,t>0\\ \end{cases}
u(t)={0,t<01,t>0
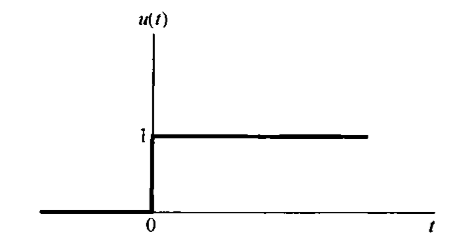
这个时候,我们想起来一件事情:在离散时间信号下,我们可以通过对阶跃函数做一阶差分,得到单位冲激函数。那么,应该类似地,在连续时间信号下,如果对阶跃函数求一阶微分,那么是不是就能够得到单位冲激函数了呢?
可是现在遇到了一个问题,就是 u ( t ) u(t) u(t) 在 t = 0处是间断的,不连续,不可导。那怎么办呢?我们可以给 u ( t ) u(t) u(t) 在 t = 0处一个小的时间间隔 △ △ △,让函数在这个小的时间间隔里面 从0变到1,如下图所示:
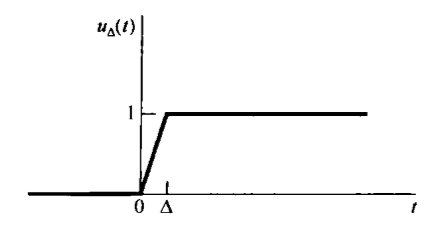
你看,这样不就可导了么!这个函数
u
△
(
t
)
u_{△}(t)
u△(t) 的导数就是 在
0
0
0~
△
△
△处是
1
△
\frac{1}{△}
△1,其他地方是0,也就是说:导数的结果是一个宽度为:
△
△
△,高度是
1
△
\frac{1}{△}
△1 的矩形:

如果
△
△
△ 不断减小,一直逼近0,那么,最终这个函数就会变成一条直线,那么我们要注意:连续时间下的单位冲激函数是一个面积函数!
而且我们还可以知道,这个单位冲激函数在整个事件轴上的积分——也就是它的面积,始终是 1 !
∫
−
∞
+
∞
δ
(
t
)
d
t
=
1
\int_{-∞}^{+∞}δ(t)dt = 1
∫−∞+∞δ(t)dt=1
当然啦,无论你怎么平移这个函数,它在整个时间轴上的积分都是1:
∫
−
∞
+
∞
δ
(
t
−
t
0
)
d
t
=
1
\int_{-∞}^{+∞}δ(t-t_0)dt = 1
∫−∞+∞δ(t−t0)dt=1
经过上面的分析:我们可以得到一个不太严谨但是很重要的思想:对于一个间断函数求微分,在中断点处将会得到一个冲激函数:冲激函数的幅度就是原函数跳变的幅度、冲激函数箭头的方向就是原函数的跳变方向(从大跳变到小:箭头向下、从小跳变到大:箭头向上)
画图的时候大家千万要注意:如果原信号有跳变的,那么对他微分之后,那个跳变的地方是需要画一个冲激的!!!
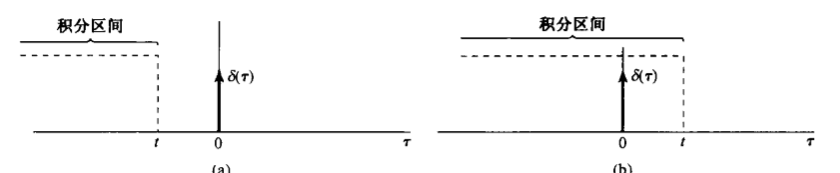
同样地、反过来通过 δ ( t ) δ(t) δ(t) 怎么推出 u ( t ) u(t) u(t) 呢? u ( t ) = ∫ 0 + ∞ δ ( t − τ ) d τ = ∫ − ∞ t δ ( т ) d τ u(t) = \int_{0}^{+∞}δ(t-τ)dτ = \int_{-∞}^tδ(т)dτ u(t)=∫0+∞δ(t−τ)dτ=∫−∞tδ(т)dτ
对于第二个等号,我们也是通过积分区间来分析的:假如
t
<
0
t <0
t<0:那么你从负无穷开始积到 t ,无论你怎么积,都是0,但是如果
t
>
0
t > 0
t>0,那么你的积分始终是1,这满足阶跃函数的定义。
1.3.1 单位冲激函数的作用:
既然我们引入了单位冲激函数和单位阶跃函数,并把他们作为典型信号,那么它们肯定是有一些有用的作用的,我们来看看:
单位冲击函数,无论是离散时间的还是连续时间的,都具有抽样的功能!
也就是说,对于某一个信号
x
(
t
)
x(t)
x(t),如果用
δ
(
t
)
δ(t)
δ(t)来抽样,就是:
x
(
t
)
δ
(
t
)
=
x
(
0
)
δ
(
t
)
x(t)δ(t) = x(0)δ(t)
x(t)δ(t)=x(0)δ(t)
也即是抽取了
x
(
t
)
x(t)
x(t) 函数
t
=
0
t=0
t=0 处的信号。如果想要抽取其他某一时刻的信号,就是:
x
(
t
)
δ
(
t
−
t
0
)
=
x
(
t
0
)
δ
(
t
−
t
0
)
x(t)δ(t-t_0) = x(t_0)δ(t-t_0)
x(t)δ(t−t0)=x(t0)δ(t−t0)
注意:
x
(
t
)
δ
(
t
)
≠
x
(
0
)
x(t)δ(t) ≠ x(0)
x(t)δ(t)=x(0) !!!因为
x
(
t
)
δ
(
t
)
x(t)δ(t)
x(t)δ(t) 是一个信号图形,而
x
(
0
)
x(0)
x(0) 是一个值。
下面课堂上提出了一个有趣的例题:
- 计算积分:
∫
−
5
5
c
o
s
(
2
Π
t
)
δ
(
t
+
3
)
d
t
\int_{-5}^5cos(2Πt)δ(t+3)dt
∫−55cos(2Πt)δ(t+3)dt
首先,我们看积分项: c o s ( 2 Π t ) δ ( t + 3 ) cos(2Πt)δ(t+3) cos(2Πt)δ(t+3),这个信号 c o s ( 2 Π t ) cos(2Πt) cos(2Πt) 和 δ ( t + 3 ) δ(t+3) δ(t+3) 相乘,就相当于采样了 c o s ( 2 Π t ) cos(2Πt) cos(2Πt) 在 t = -3 时的值,即 c o s ( 2 Π t ) δ ( t + 3 ) = c o s ( − 2 Π 3 ) δ ( t + 3 ) = c o s ( 6 Π ) δ ( t + 3 ) = δ ( t + 3 ) cos(2Πt)δ(t+3) = cos(-2Π3)δ(t+3) = cos(6Π)δ(t+3) = δ(t+3) cos(2Πt)δ(t+3)=cos(−2Π3)δ(t+3)=cos(6Π)δ(t+3)=δ(t+3)
下面,我们就看看积分区间,[-5 , 5] 包括了 t = -3 的地方,因此,积分区间下函数的面积就是1 ,因此答案就是 1
1.4 矩形信号(门信号)
矩形信号如下图所示,它只有在某一段时间内有幅值,其他时间都是0,如下图:
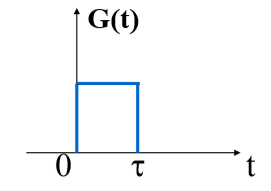
这个矩形信号,其实我们可以用阶跃函数表示出来。
比如上图的矩形信号,我们就可以表示成: G ( t ) = u ( t ) − u ( t − τ ) G(t) = u(t) - u(t-τ) G(t)=u(t)−u(t−τ)
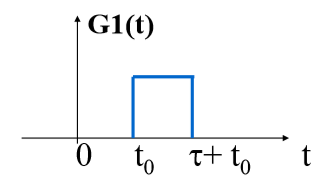
这就可以表示成: u ( t − t 0 ) − u ( t − t 0 − τ ) u(t-t_0) - u(t-t_0-τ) u(t−t0)−u(t−t0−τ)
1.4 Sa信号(sinc信号)
Sa信号在我的这一篇
B
l
o
g
Blog
Blog中有介绍,这里不再赘述:
【信号与系统学习笔记】—— 傅里叶变换1 从零开始推导傅里叶变换(详细易懂版)

















 2017
2017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









