









(本周共计4个作业,一个扩展作业)
- 以Lena为原始图像,通过OpenCV实现平均滤波,高斯滤波及中值滤波,比较滤波结果。
import cv2 as cv
help(cv.inRange)
filename = r'D:\opencv\opencv\sources\samples\data\lena.jpg'
img = cv.imread(filename)
Gaussian = cv.GaussianBlur(img, (5, 5), 0)
Median = cv.medianBlur(img, 5)
# getStructuringElement函数会返回指定形状和尺寸的结构元素
kernel = cv.getStructuringElement(cv.MORPH_ELLIPSE, (5, 5))
# morphologyEx 形态学变化函数
Morphology = cv.morphologyEx(img, cv.MORPH_OPEN, kernel)
Morphology = cv.morphologyEx(Morphology, cv.MORPH_CLOSE, kernel)
# 平均滤波对噪声的效果差,而中值滤波和高斯滤波对噪声效果好
cv.imshow('GaussianBlur', Gaussian)
cv.imshow('MedianBlue', Median)
cv.imshow('MorphologyEx', Morphology)
cv.waitKey()
cv.destroyAllWindows()
- 以Lena为原始图像,通过OpenCV使用Sobel及Canny算子检测,比较边缘检测结果。
import cv2 as cv
import pdb
filename = r'D:\opencv\opencv\sources\samples\data\lena.jpg'
img = cv.imread(r'D:\opencv\opencv\sources\samples\data\lena.jpg')
img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Sobel算子
y0 = cv.Sobel(img, cv.CV_16S, 1, 0)
x0 = cv.Sobel(img, cv.CV_16S, 0, 1)
absX = cv.convertScaleAbs(x0)
absY = cv.convertScaleAbs(y0)
Sobel = cv.addWeighted(absX, 0.5, absY, 0.5, 0)
# Robert算子
def robert_suanzi(img):
r, c = img.shape[0], img.shape[1]
r_sunnzi = [[-1, -1], [1, 1]]
for x in range(r):
for y in range(c):
if (y + 2 <= c) and (x + 2 <= r):
imgChild = img[x:x + 2, y:y + 2]
list_robert = r_sunnzi * imgChild
img[x, y] = abs(list_robert.sum()) # 求和加绝对值
return img
Robert = robert_suanzi(img)
#Laplacian滤波
Laplacian = cv.Laplacian(img, cv.CV_64F)
#Canny算子
Canny = cv.Canny(img, 10, 70)
# Canny算子明显比Sobel算子和Robert检测的更加清晰,Laplacian的结果不太好,应该是参数上出了些问题,但是调了很久都不太好。
cv.imshow('Robert', Robert)
# cv.imshow('absX', absX)
# cv.imshow('absY', absY)
cv.imshow('Sobel', Sobel)
cv.imshow('Laplacian', Laplacian)
cv.imshow('Canny', Canny)
cv.waitKey()
cv.destroyAllWindows()
- 在OpenCV安装目录下找到课程对应演示图片(安装目录\sources\samples\data),首先计算灰度直方图,进一步使用大津算法进行分割,并比较分析分割结果。
import cv2 as cv
import matplotlib.pyplot as plt
img = cv.imread(r'D:\opencv\opencv\sources\samples\data\lena.jpg')
def threshold_binary(src):
#把BGR图像转化成灰度图像
gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
#获得灰度直方图以便调整算法的使用
plt.hist(src.ravel(), 256, [0, 256])
plt.show()
#几种二值化方法
ret, binary = cv.threshold(gray, 50, 255, cv.THRESH_BINARY)#指定阈值50
print("二值阈值: %s" % ret)
print(binary)
#cv.imshow("threshold_binary", binary)
ret_otsu, binary_otsu = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
print("二值阈值_otsu: %s" %ret_otsu)
cv.imshow("threshold_binary_otsu", binary_otsu)
cv.waitKey()
cv.destroyAllWindows()
ret_tri, binary_tri = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE)
print("二值阈值_tri: %s" % ret_tri)
threshold_binary(img)
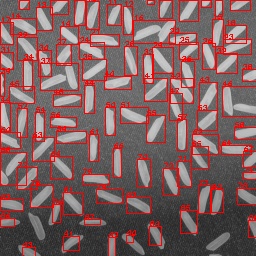
- 使用米粒图像,分割得到各米粒,首先计算各区域(米粒)的面积、长度等信息,进一步计算面积、长度的均值及方差,分析落在3sigma范围内米粒的数量。
import cv2 as cv
import copy
filename = "D:\opencv\Rice.jpg"
img = cv.imread(filename)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
_, bw = cv.threshold(gray, 0, 0xff, cv.THRESH_OTSU)
element = cv.getStructuringElement(cv.MORPH_CROSS, (3, 3))
bw = cv.morphologyEx(bw, cv.MORPH_OPEN, element)
seg = copy.deepcopy(bw)
# opencv3的findContours会返回三个值,分别是img, countours, hierarchy
gray, cnts,hier= cv.findContours(seg, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
print(cnts)
count = 0
for i in range(len(cnts), 0, -1):
c = cnts[i - 1]
area = cv.contourArea(c)
if area < 10:
continue
count = count + 1
print('blob', i, ':', area)
x, y, w, h = cv.boundingRect(c)
cv.rectangle(img, (x, y), (x + w, y + h), (0, 0, 0xff), 1)
cv.putText(img, str(count), (x, y), cv.FONT_HERSHEY_PLAIN, 0.5, (0, 0, 0xff))
print("米粒数量:", count)
cv.imshow("源图", img)
cv.imshow("阈值化图", bw)
# 检测除了93个米粒,可以看出还是漏检了2个米粒,并由将两个米粒检测成一个的情况,面积长度等信息由cnts矩阵给出
cv.waitKey()
cv.destroyAllWindows()
输出图片:
扩展作业:
5. 使用棋盘格及自选风景图像,分别使用SIFT、FAST及ORB算子检测角点,并比较分析检测结果。
import cv2 as cv
import copy
import pdb
# SIFT
filename1 = r'D:checkerboard.jpg'
img0 = cv.imread(filename1)
img0 = cv.cvtColor(img0, cv.COLOR_BGR2GRAY)
img1 = copy.deepcopy(img0)
# 创建
minHesssian = 1000
detector = cv.xfeatures2d.SURF_create(minHesssian)
descriptor = cv.xfeatures2d.SURF_create()
matcher1 = cv.DescriptorMatcher_create("BruteForce")
# 检测特征点
keyPoint1 = detector.detect(img1)
img1 = cv.drawKeypoints(img1, keyPoint1, img1, [0, 0, 0xff])
# ORB
# 创建
minHesssian = 1000
detector = cv.ORB_create(minHesssian)
descriptor = cv.ORB_create()
matcher1 = cv.DescriptorMatcher_create("BruteForce")
img2 = copy.deepcopy(img0)
# 检测特征点
keyPoint2 = detector.detect(img1)
img2 = cv.drawKeypoints(img2, keyPoint1, img2, [0, 0, 0xff])
# 创建
img3 = copy.deepcopy(img0)
fast = cv.FastFeatureDetector_create(threshold=40, \
nonmaxSuppression=True, type=cv.FAST_FEATURE_DETECTOR_TYPE_9_16)
kp = fast.detect(img1, None)
img3 = cv.drawKeypoints(img3, kp, img3, color = (0, 0, 255))
# ORB与SIFT检测结果差别不大,FAST算子检测出的角点更多。三者从结果上来说,还是存在较多的误点
cv.imshow("FAST", img3)
cv.imshow("SIFT keypoints", img1)
cv.imshow("ORB keypoints", img2)
cv.waitKey()
print("keypoint1.size = ", len(keyPoint1))
(可选)使用Harris角点检测算子检测棋盘格,并与上述结果比较。
import cv2 as cv
import numpy as np
import pdb
filename = r'D:checkerboard.jpg'
img = cv.imread(filename)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
class Cornerdetect():
def detect(self, img):
self.cornerStrength = cv.cornerHarris(img, self.neighbourhood, self.aperture, self.k)
#cv.imshow('ini', self.cornerStrength)
min_val, self.maxStrength, min_indx, max_indx = cv.minMaxLoc(self.cornerStrength)
dilated = cv.dilate(self.cornerStrength, cv.getStructuringElement(cv.MORPH_RECT, (3, 3)))
self.localMax = cv.compare(self.cornerStrength, dilated, cv.CMP_EQ)
def getCornerMap(self, qualitylevel): # the value of qualitylevel between 0.03 and 0.05
self.threshold = qualitylevel * self.maxStrength
_, self.cornerTH = cv.threshold(self.cornerStrength, self.threshold, 255, cv.THRESH_BINARY)
self.cornerTH = np.array(self.cornerTH)
self.cornerMap = self.cornerTH.astype(np.uint8)
cv.bitwise_and(self.cornerMap, self.localMax, self.cornerMap)
cv.bitwise_and(gray, self.cornerMap, gray)
#cv.imshow("bitand", img)
#cv.imshow("gray", gray)
def drawOnImage(self, image, points, color, radius, thickness):
print(len(points))
for i in points:
print(i)
cv.circle(image, tuple(i), radius, color, thickness)
Parament = Cornerdetect()
Parament.k = 0.04
Parament.aperture = 3
Parament.neighbourhood = 2
Cornerdetect.detect(Parament, gray)
Cornerdetect.getCornerMap(Parament, qualitylevel=0.1)
pos = np.nonzero(gray != 0)
print(pos)
pos = tuple(map(list, zip(*pos)))
print(pos)
Cornerdetect.drawOnImage(Parament, img, pos, (0, 0, 255), 3, 1)
cv.imshow('image', img)
cv.waitKey()
cv.destroyAllWindows()
# 用Harris检测出的结果基本正确,明显比上述三种好,具体原因不是很清楚,还有待研究















 2216
2216











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









