






镭神CH128x1系列激光雷达驱动安装和PPS时间同步
文章目录
前言
- 本条博客的需求来源于自动驾驶中镭神激光雷达的使用与PPS时间同步。
一、驱动安装到点云显示
1. PC连接雷达
- 连接好各个连线,上电,在网络设置的有线连接中,设置网络参数:
- IPv4的方式设置为
手动. - 设置地址中的地址为:
192.168.1.102,子网掩码为:255.255.255.0 - 点击
应用以保存配置。 - 在终端中运行命令:
ping 192.168.1.102,理论上可以连接成功。 - pc与lidar连接完成。
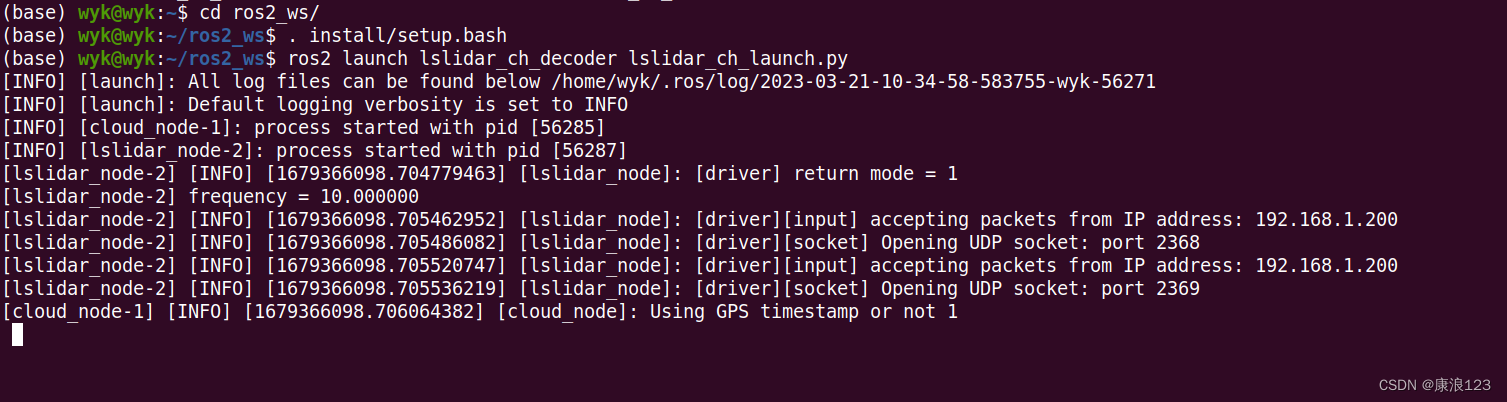
- 下面开始进入编译过程:进入工作空间目录(src文件夹的前一级)下,运行命令
colcon build进行编译。 - 编译完成后,运行命令
source install/setup.bash - 然后在工作空间目录下运行命令:
ros2 launch lslidar_ch_decoder lslidar_ch_launch.py - Rviz中显示命令:
ros2 run rviz2 rviz2,fixed frame设置为:lslidar
2. Rviz中点云显示效果

二、组合导航给lidar授时实验
1. 雷达控制器上的接口定义:

2.雷达接收组合导航的PPS信号和GPRMC message的接线方式
这里雷达接收和组合导航发送的PPS信号皆为正同步脉冲信号。
2.1 雷达信号线接线图
这里红线是1号线,靠近电源插头一侧。

2.2 GPRMC message接线图
对应颜色线接到华测组合导航GPRMC message输出端子的2口和4口(黄3 TX_GPS_C接2口;黑2 GND接4口),这里走的应该是RS232协议。

2.3 总体接线图
lidar的pps(6绿线)接到组合导航PPS输出端口内孔;GND(4白线)接到外轴。

3. 实现效果
组合导航给镭神激光雷达授时,每秒授时一次,显示比北京时间早8个小时的国际统一时间。
总结
本文主要介绍了在Ubuntu中配置镭神激光雷达驱动到点云显示的具体步骤以及如何让组合导航给 lidar 授时。
致谢
向开源致敬,向各位博主致敬!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









