






1. 建立工程
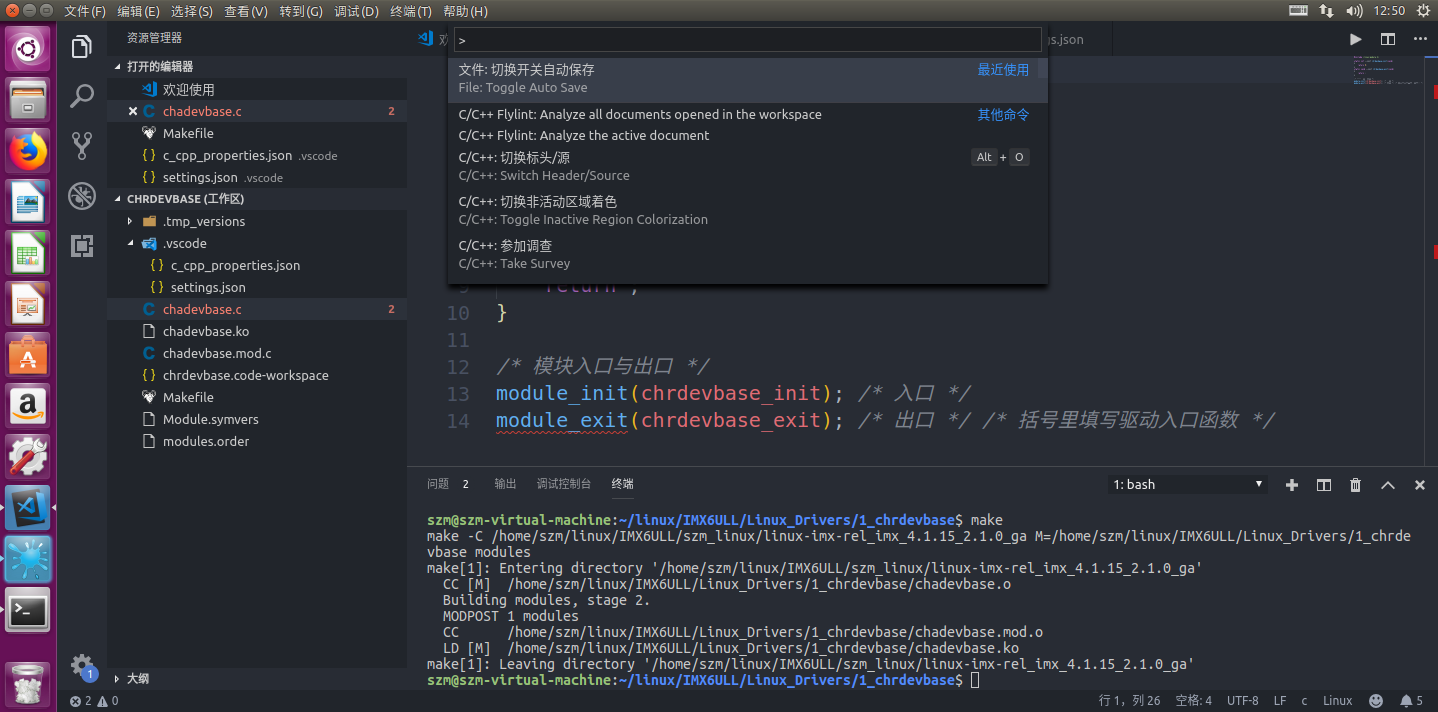
2. 建立.vscode
c_pp_properties.json
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/home/szm/linux/IMX6ULL/szm_linux/linux-imx-rel_imx_4.1.15_2.1.0_ga/include",
"/home/szm/linux/IMX6ULL/szm_linux/linux-imx-rel_imx_4.1.15_2.1.0_ga/arch/arm/include",
"/home/szm/linux/IMX6ULL/szm_linux/linux-imx-rel_imx_4.1.15_2.1.0_ga/arch/arm/include/generated/"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "gcc-x64"
}
],
"version": 4settings.json
{
"search.exclude": {
"**/node_modules": true,
"**/bower_components": true,
"**/*.o":true,
"**/*.su":true,
"**/*.cmd":true,
"Documentation":true,
},
"files.exclude": {
"**/.git": true,
"**/.svn": true,
"**/.hg": true,
"**/CVS": true,
"**/.DS_Store": true,
"**/*.o":true,
"**/*.su":true,
"**/*.cmd":true,
"Documentation":true,
}
}3.Makefile
# KERNELDIR表示内核源码路径
KERNELDIR := /home/szm/linux/IMX6ULL/szm_linux/linux-imx-rel_imx_4.1.15_2.1.0_ga
# 表示当前路径,即pwd
CURRENT_PATH := $(shell pwd)
# 将chadevbase.c编译成模块
obj-m := chadevbase.o
build : kernel_modules
# 具体的编译命令,后面的 modules 表示编译模块,-C 表示将当前的工作目录切
# 换到指定目录中,也就是 KERNERLDIR 目录。M 表示模块源码目录,“make modules”命令
# 中加入 M=dir 以后程序会自动到指定的 dir 目录中读取模块的源码并将其编译为.ko 文件。
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean4.代码
4.1 驱动模块加载与卸载
模块编译完成之后扩展名为ko,有两种命令可以加载模块:insmod和modprobe。insmod是最简单的模块加载命令,此命令用于加载指定的.ko 模块。
insmod 命令不能解决模块的依赖关系,比如 drv.ko 依赖 first.ko 这个模
块,就必须先使用insmod 命令加载 first.ko 这个模块,然后再加载 drv.ko这个模块。但是 modprobe 就不会存在这个问题,modprobe 会分析模块的依赖关系,然后会将所有的依赖模块都加载到内核中,因此modprobe 命令相比insmod 要智能一些。modprobe 命令主要智能在提供了模块的依赖性分析、错误检查、错误报告等功能,推荐使用 modprobe 命令来加载驱动。modprobe 命令默认会去/lib/modules/kernel-version目录中查找模块,比如本书使用的 Linux kernel 的版本号为 4.1.15,因此 modprobe 命令默认会到/lib/modules/4.1.15 这个目录中查找相应的驱动模块,一般自己制作的根文件系统中是不会有这个目录的,所以需要自己手动创建。
我们把编译好的ko文件放到nfs中
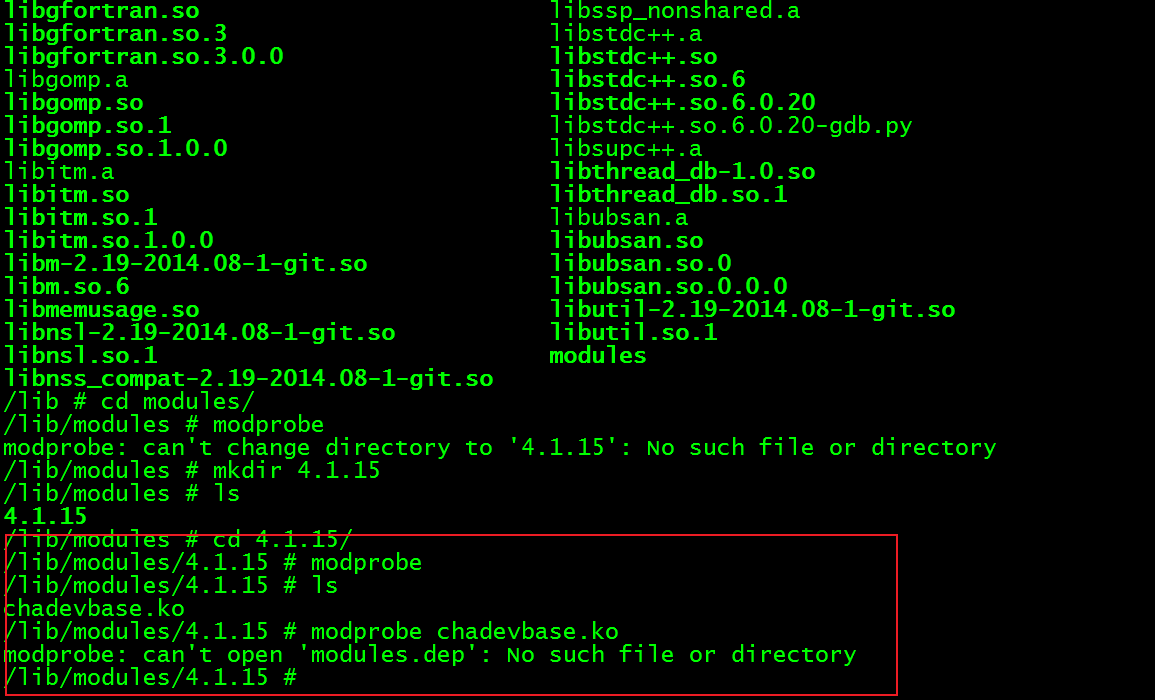
在加载模块驱动之前要先加demod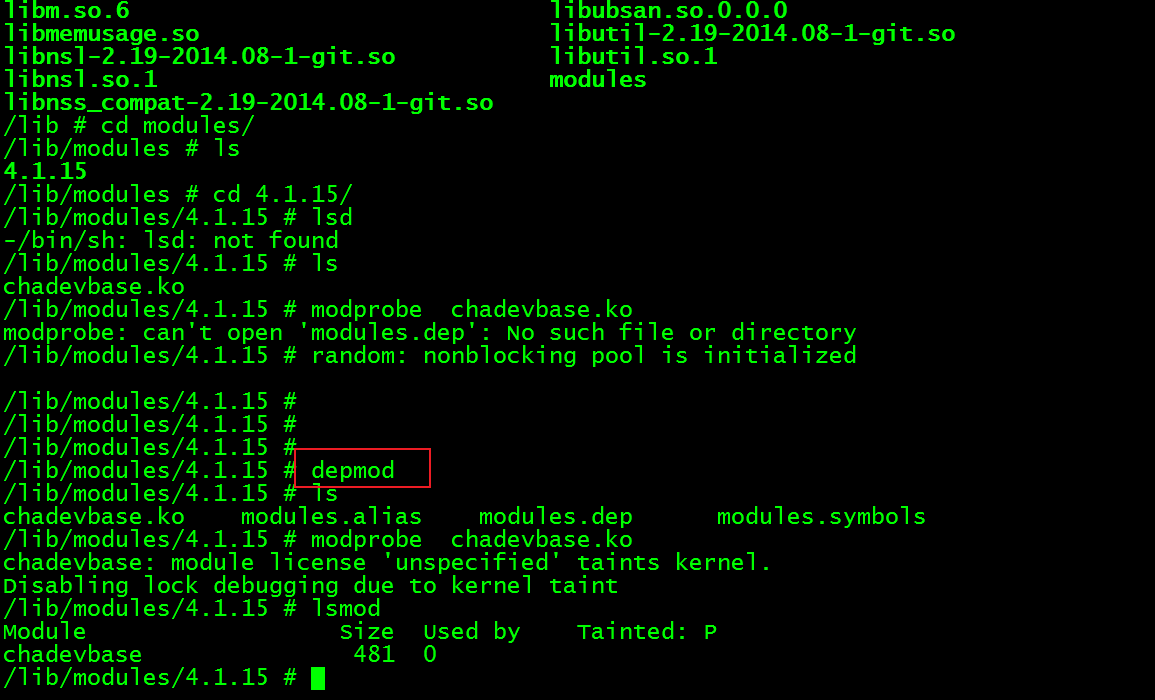
然后使用加载命令,加载成功后可以用lsmod查看驱动
使用rmmod卸载驱动
4.2 字符设备的注册与注销
- 我们需要向系统注册一个字符设备,使用函数register_chrdev
- 卸载驱动的时候,需要注销掉,前面注册的字符设备unregister_chrdev
4.3 设备号
- linux内核使用dev_t
typedef __ kernel_dev_t dev_t
typedef __ u32 __ kernel_dev_t
typedef unsigned int __ u32 - Linux内核将设备号分成两部分,主设备号和次设备号。主设备号占用前12位,次设备号占用后20位
- 设备号的操作函数
从dev_t获取主设备号和次设备号,MAJOR(dev_t), MINOR(dev_t)。也可以使用主设备号和次设备号,通过mkdev(major,minor), 所以一定保证驱动的主设备号和次设备号一定是唯一的,不能冲突
查看当前主设备号的使用情况:
cat /proc/devices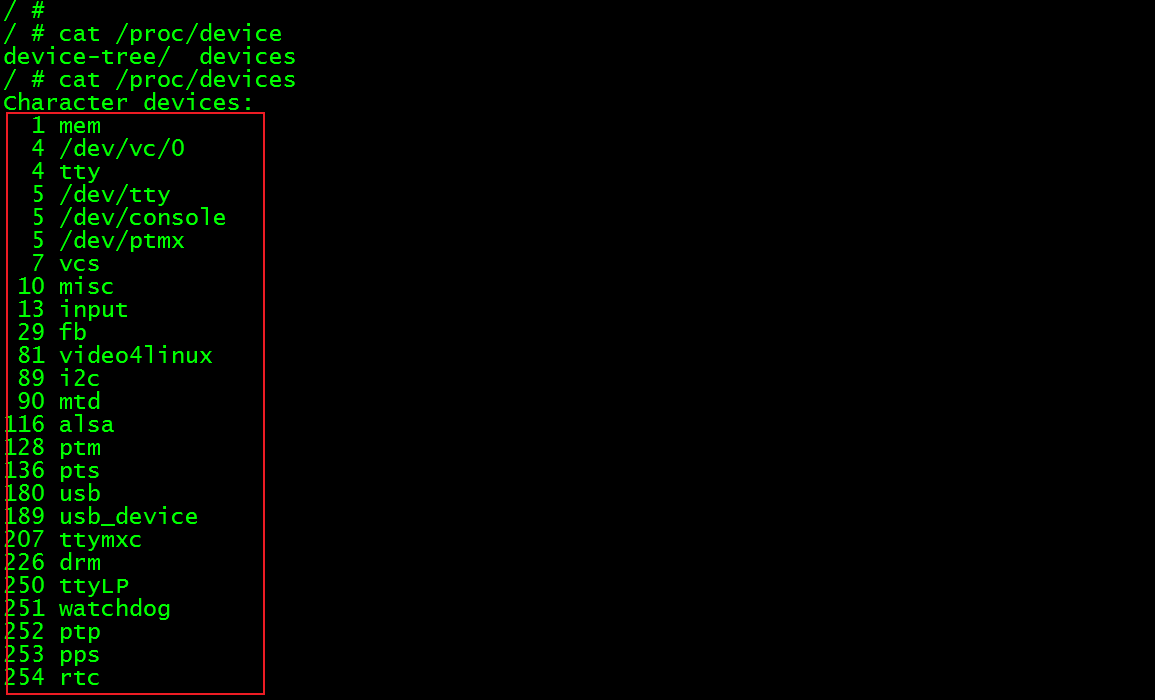
我们看到200没有用
4.4 file_opterations开发,驱动框架
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /* 名字 */
static int chrdevbase_open(struct inode *inode, struct file *filp)
{
printk("chrdevbase_open\r\n");
return 0;
}
/* 对应的驱动关闭注意和原来的区别 */
static int chrdevbase_release(struct inode *inode, struct file *filp)
{
printk("chrdevbase_release\r\n");
return 0;
}
static ssize_t chrdevbase_read(struct file *filp, __user char *buf,
size_t count, loff_t *ppos)
{
printk("chrdevbase_read\r\n");
return 0;
}
static ssize_t chrdevbase_write(struct file *filp, __user const char *buf,
size_t count, loff_t *ppos)
{
printk("chrdevbase_write\r\n");
return 0;
}
static struct file_operations chrdevbase_fops={
.owner = THIS_MODULE,
.open = chrdevbase_open,
.release = chrdevbase_release,
.read = chrdevbase_read,
.write = chrdevbase_write,
};
static int __init chrdevbase_init(void)
{
int ret = 0;
printk("module init\r\n"); //linux内核的打印函数
/* 注册字符设备 */
/* file_opterations就是要实现的 */
ret = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME,
&chrdevbase_fops);
if(ret < 0)
{
printk("chrdevbase init failed\r\n");
}
return 0;
}
static void __exit chrdevbase_exit(void)
{
printk("module exit\r\n");
/* 注销字符设备 */
unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);
return ;
}
/* 模块入口与出口 */
module_init(chrdevbase_init); /* 入口 */ /* 当装载的时候自动执行这个函数,卸载执行下面的函数 */
module_exit(chrdevbase_exit); /* 出口 */ /* 括号里填写驱动入口函数 */
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Shao Zheming");4.5 应用程序编写
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
/*
* argc: 应用程序参数个数
* argv[]: 参数是什么,具体的参数,说明参数是字符串的形式
* .chrdevbaseApp <filename> 调用情况
* */
int main(int argc, char *argv[])
{
int ret = 0;
int fd = 0; //文件描述符
char *filename;
char readBuf[100], writeBuf[100];
// 当输入这个命令时,.chrdevbaseApp <filename>
// 第一个参数,也就是argv[0]就是.chrdevbaseApp
// 第二个参数,也就是argv[1]就是<filename>
filename = argv[1];
// O_RDWR可读可写
fd = open(filename, O_RDWR);
if(fd < 0){
printf("Can't open file %s \r\n", filename); //应用测试就要用printf了
return -1;
}
/* 读和写测试 */
/* read */
// 50指的是从驱动里面读多少个字节
// 返回的是你读的字节数, -1是错了,如果小于50,说明驱动只能给你小于50,没错
ret = read(fd, readBuf, 50);
if(ret < 0){
printf("read file %s failed \r\n", filename);
}else{
}
/* write */
ret = write(fd, writeBuf, 50);
if(ret < 0){
printf("write file %s failed \r\n", filename);
}else{
}
/* write */
ret = close(fd);
if(ret < 0){
printf("close file %s failed \r\n", filename);
}
return 0;
}注意是arm架构,所以在Ubuntu上运行肯定报错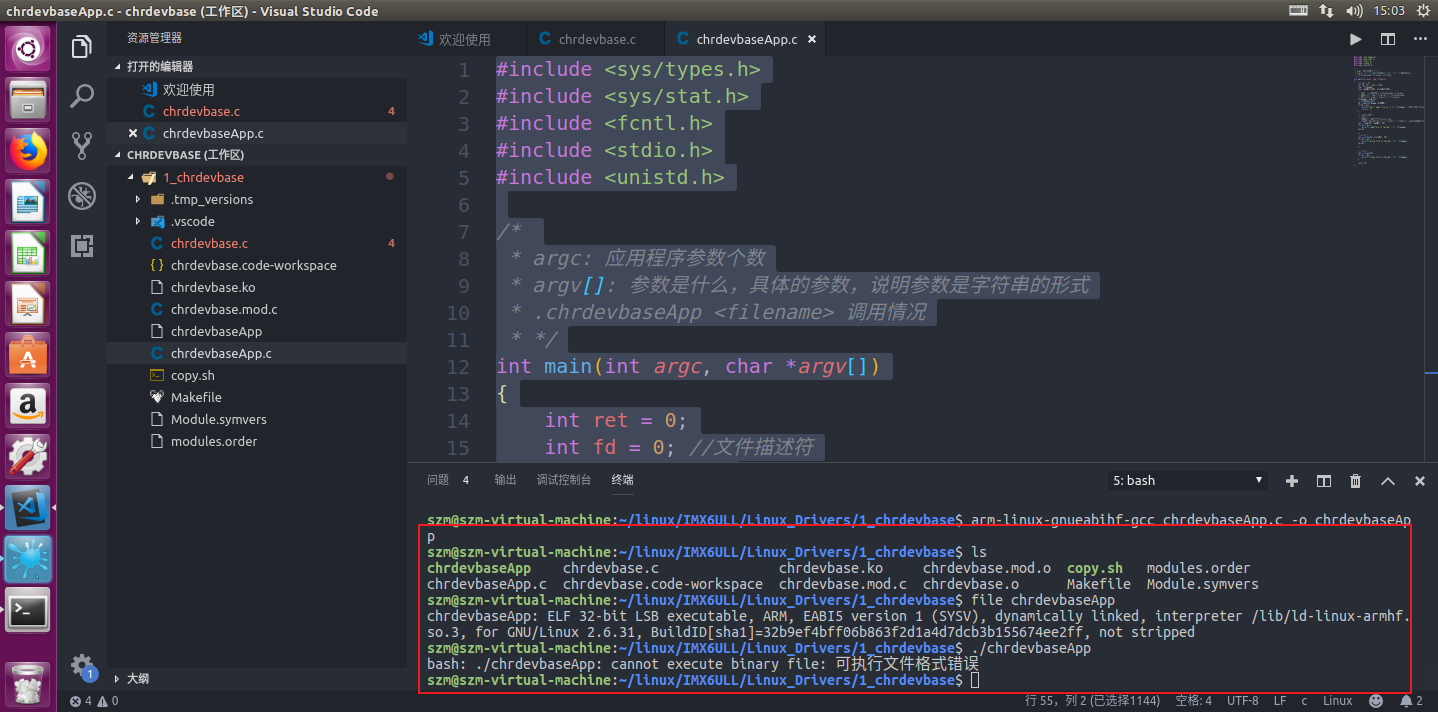
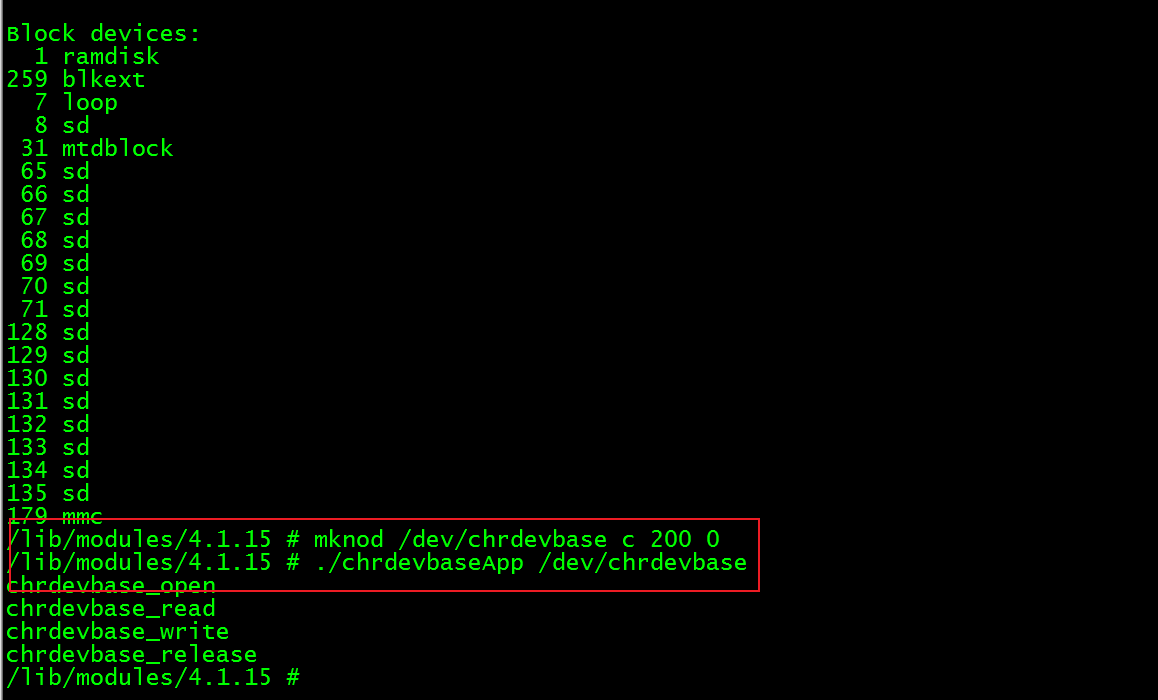
5. 测试
进入dev查看chrdevbase,发现没有这个东西,需要手动创建
c是字符设备的意思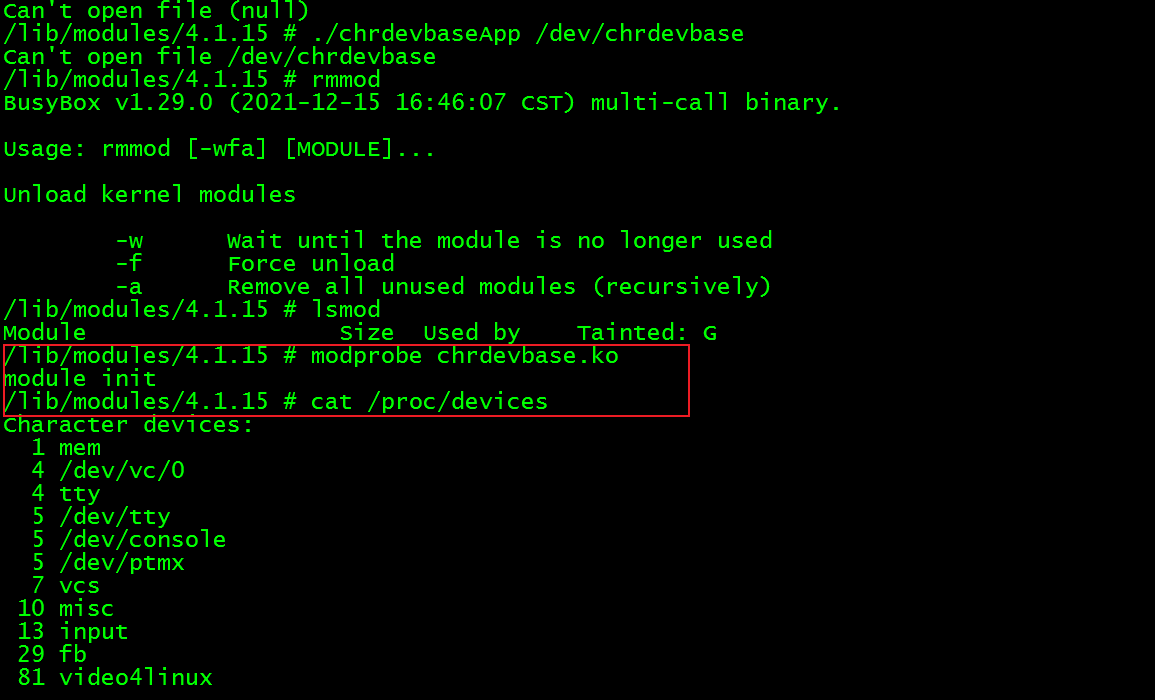
6. 完善这个驱动
要求可以读写程序
chrdevbase.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#define CHRDEVBASE_MAJOR 200 /* 主设备号 */
#define CHRDEVBASE_NAME "chrdevbase" /* 名字 */
/* 和应用层一致 */
static char readBuf[100]; /* 读缓冲 */
static char writeBuf[100]; /* 写缓冲 */
static char kernel_data[] = {"kernel data!\r\n"};
static int chrdevbase_open(struct inode *inode, struct file *filp)
{
//printk("chrdevbase_open\r\n");
return 0;
}
/* 对应的驱动关闭注意和原来的区别 */
static int chrdevbase_release(struct inode *inode, struct file *filp)
{
//printk("chrdevbase_release\r\n");
return 0;
}
static ssize_t chrdevbase_read(struct file *filp, __user char *buf,
size_t count, loff_t *ppos)
{
int ret = 0;
//printk("chrdevbase_read\r\n");
/* 应用程序不能直接访问内核数据,必须借用其他的函数 */
memcpy(readBuf, kernel_data, sizeof(kernel_data));
//count是由用户决定的
ret = copy_to_user(buf, readBuf, count);
if(ret == 0){
}else{
}
return 0;
}
static ssize_t chrdevbase_write(struct file *filp, __user const char *buf,
size_t count, loff_t *ppos)
{
int ret = 0;
//printk("chrdevbase_write\r\n");
/* 应用程序不能直接访问内核数据,必须借用其他的函数 */
//count和buf是由用户决定的
ret = copy_from_user(writeBuf, buf, count);
if(ret == 0){
printk("kernel recevice data:%s \r\n", writeBuf);
}else{
}
return 0;
}
static struct file_operations chrdevbase_fops={
.owner = THIS_MODULE,
.open = chrdevbase_open,
.release = chrdevbase_release,
.read = chrdevbase_read,
.write = chrdevbase_write,
};
static int __init chrdevbase_init(void)
{
int ret = 0;
printk("module init\r\n"); //linux内核的打印函数
/* 注册字符设备 */
/* file_opterations就是要实现的 */
ret = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME,
&chrdevbase_fops);
if(ret < 0)
{
printk("chrdevbase init failed\r\n");
}
return 0;
}
static void __exit chrdevbase_exit(void)
{
printk("module exit\r\n");
/* 注销字符设备 */
unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);
return ;
}
/* 模块入口与出口 */
module_init(chrdevbase_init); /* 入口 */ /* 当装载的时候自动执行这个函数,卸载执行下面的函数 */
module_exit(chrdevbase_exit); /* 出口 */ /* 括号里填写驱动入口函数 */
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Shao Zheming");测试APP文件
chrdevbaseApp.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
/*
* argc: 应用程序参数个数
* argv[]: 参数是什么,具体的参数,说明参数是字符串的形式
* .chrdevbaseApp <filename> <1:2> 1表示读,2表示写
* .chrdevbaseApp /dev/chrdevbase 1 从这个驱动里面读数据
* .chrdevbaseApp /dev/chrdevbase 2 从这个驱动里面写数据
* */
int main(int argc, char *argv[])
{
int ret = 0;
int fd = 0; //文件描述符
char *filename;
char readBuf[100], writeBuf[100];
static char user_data[] = {"I write an user data to kernel!\r\n"};
// 当输入这个命令时,.chrdevbaseApp <filename>
// 第一个参数,也就是argv[0]就是.chrdevbaseApp
// 第二个参数,也就是argv[1]就是<filename>
if(argc != 3){
/* 表示参数不是3个 */
printf("Error usage! \r\n");
return -1;
}
filename = argv[1];
// O_RDWR可读可写
fd = open(filename, O_RDWR);
if(fd < 0){
printf("Can't open file %s \r\n", filename); //应用测试就要用printf了
return -1;
}
if(atoi(argv[2]) == 1){/* 表示读 */
/* 读和写测试 */
/* read */
// 50指的是从驱动里面读多少个字节
// 返回的是你读的字节数, -1是错了,如果小于50,说明驱动只能给你小于50,没错
ret = read(fd, readBuf, 50);
if(ret < 0){
printf("read file %s failed \r\n", filename);
}else{
printf("APP read data:%s \r\n", readBuf);
}
}
if(atoi(argv[2]) == 2){ /* 表示写 */
/* write */
memcpy(writeBuf, user_data, sizeof(user_data));
ret = write(fd, writeBuf, 50);
if(ret < 0){
printf("write file %s failed \r\n", filename);
}else{
}
}
/* write */
ret = close(fd);
if(ret < 0){
printf("close file %s failed \r\n", filename);
}
return 0;
}














 1378
1378











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









