






1. 历史
- 公元前440年,古希腊哲学家、预言家、科学家、江湖术士恩培多克勒提出月亮是由反射发光;提出光有速度。
- 1638年,伽利略提着一盏灯站在山头上,默默的把灯盖了起来…
远处的另一个山头上,他的助手在看到灯灭的一瞬间也把自己手上的灯盖了起来。伽利略想用这样的办法计算出光的速度。可惜他不仅没能测出光速,甚至没能判断出光速是不是无限的,对于当时的技术手段,光速实在太快了。
- 1676年,奥勒罗默通过观察木星的卫星,得到光在地球公转轨道的传播时间为22分钟
- 爱因斯坦发表狭义相对论,提到光速恒定不变的概念
- 1972年,美国埃文森等人测量出真空中的光速约为299792458m
2. 提出激光雷达
- Light Detection And Ranging
- RADAR radio detection and ranging
- 通过利用光速同一介质速度不变等原理,激光雷达应运而生

- 激光雷达是一种通过发射激光束探测目标的雷达,车用雷达的目的都是先探测距离为基础
基础原理
-
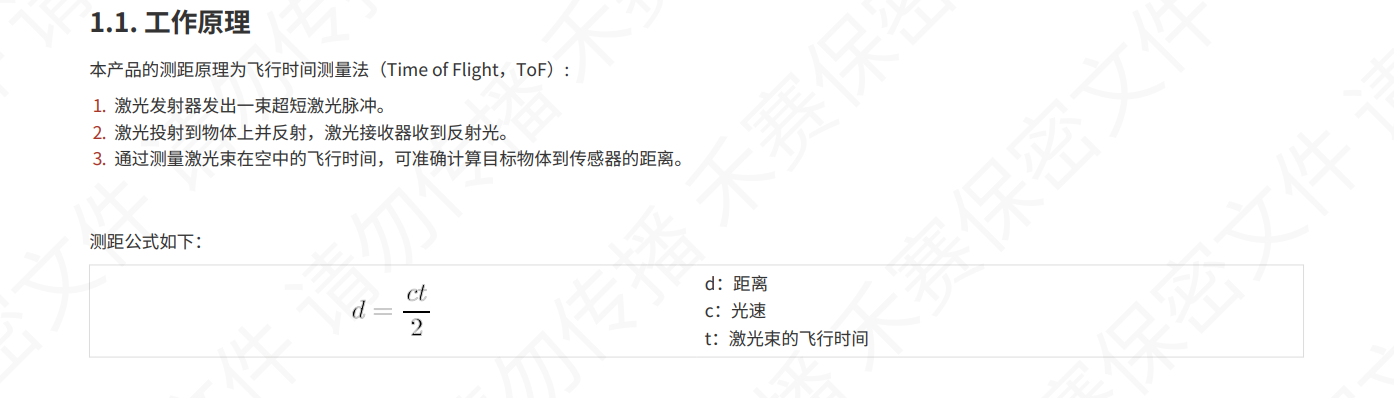
ToF法:
- 简单理解可表示为发射一段激光束,反射回来被接收器接收,再用光速来计算距离,即ToF法
- 简单理解可表示为发射一段激光束,反射回来被接收器接收,再用光速来计算距离,即ToF法
-
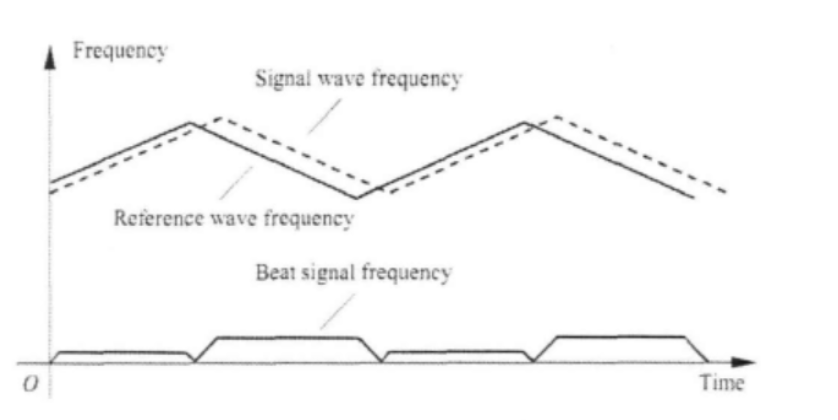
FMCW(Frequency Modulated Continuous Wave)调频连续波
- 有一个信号发生器发出频率随时间呈三角波变化的信号给发射机(激光雷达发出信号),然后接收机接收这个频率呈三角状变化的信号,回波的频率变化规律与发射的相同,但是存在时间延迟,这就导致相同时间的频率有微小的差别。通过对两个信号的拍频测量就可以得到距离信息。
- 优点:低峰值功率、测量速度、解决干扰,ToF法加入光随机码,FMCW对波进行encode密码
-
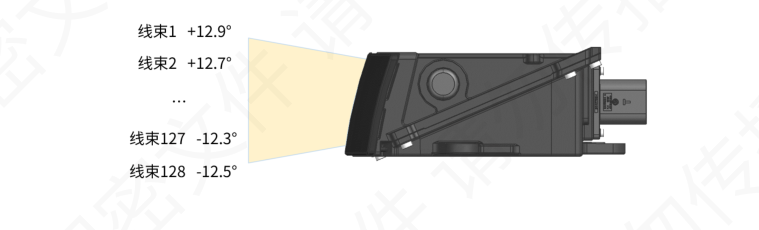
但是,仅靠一束光线仅能测出一个点的距离,没法满足如自动驾驶等的探测需求,因此,需要加上更多的线束,这样就能探测出障碍物的垂直轮廓了,线束越多能够探测的精度就越高

-
128线束及约为25度的垂直视场角
-
分辨率1200*128,每秒153万次测量

-
禾赛at128一维转镜转镜
-
常用波长为905nm,无法做到高功率,否则对人眼有伤害;1550nm,人眼对这一波段不敏感,功率可以做高
-
可是这样激光雷达只能扫一条线啊
激光雷达分类
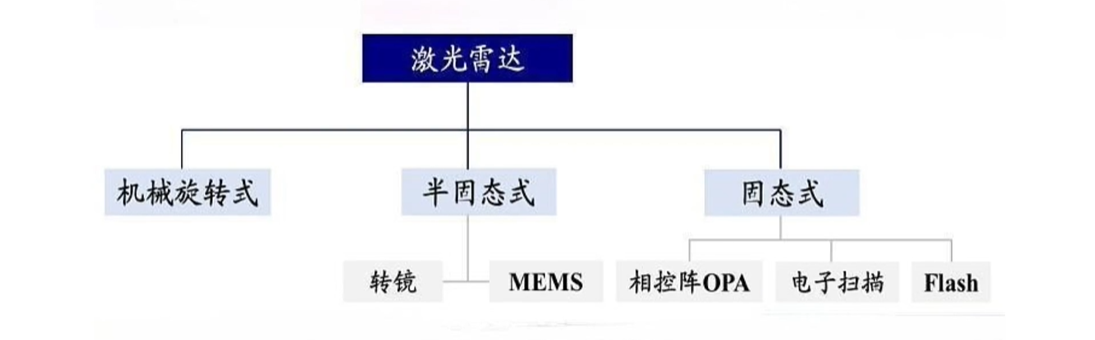
机械式
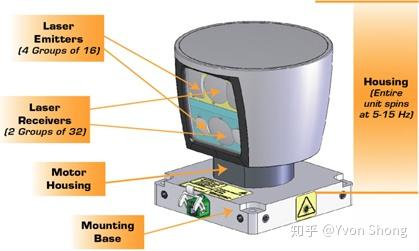
- Velodyne 64线激光雷达结构示意图,发射系统和接收系统存在物理意义上的转动,也就是通过不断旋转发射器,将激光点变成线,并在竖直方向上排布多束激光发射器形成面,达到 3D 扫描并接收信息的目的。但由于通过复杂的机械结构实现高频准确的的转动,平均的失效时间仅 1000-3000 小时,难以达到车厂最低 13000 小时的要求。
半固态
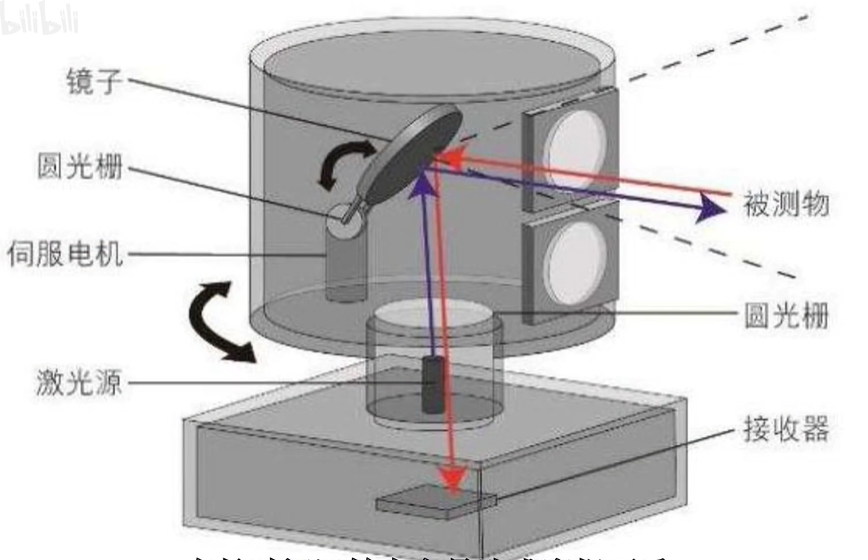
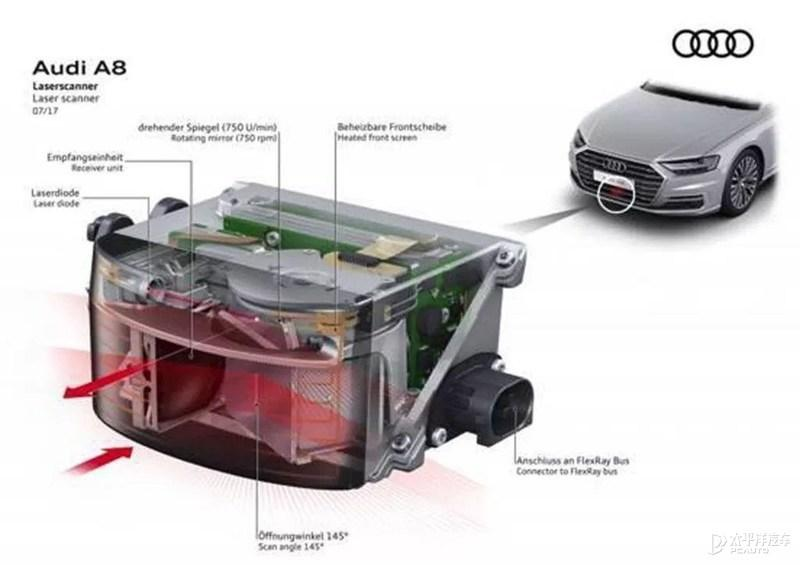
转镜
-
与MEMS微振镜平动和扭转的形式不同,转镜是反射镜面围绕圆心不断旋转。转镜在功耗、散热等方面有着更大优势。法雷奥推出的全球首款车规级激光雷达就采用了转镜形式。
-
在转镜方案中,也存在一面扫描镜(一维转镜)和一纵一横两面扫描镜(二维转镜)两种技术路线。一维转镜线束与激光发生器数量一致,而二维转镜可以实现等效更多的线束,在集成难度和成本控制上存在优势。
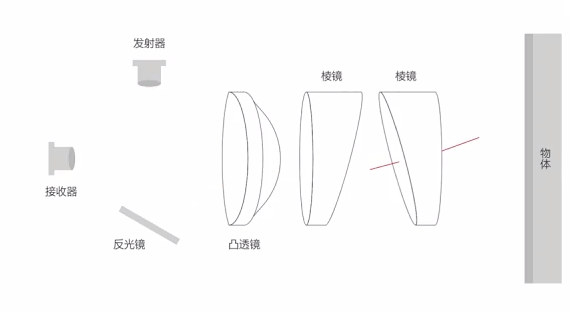
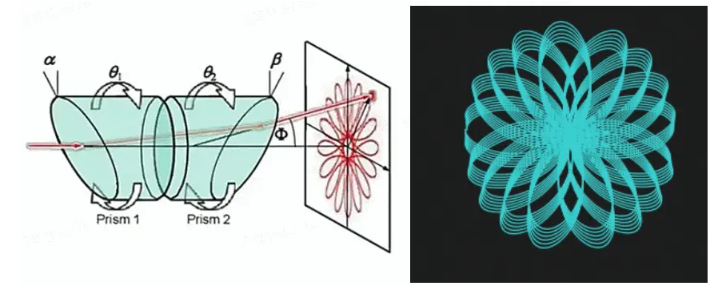
棱镜
- 棱镜式激光雷达也称为双楔形棱镜式激光雷达,内部包括两个楔形棱镜,激光在通过第一个楔形棱镜后发生一次偏转,通过第二个楔形棱镜后再一次发生偏转。控制两面棱镜的相对转速便可以控制激光束的扫描形态。与前面提到的扫描形式不同,棱镜激光雷达累积的扫描图案形状状若菊花,而并非一行一列的点云状态。这样的好处是只要相对速度控制得当,在同一位置长时间扫描几乎可以覆盖整个区域。
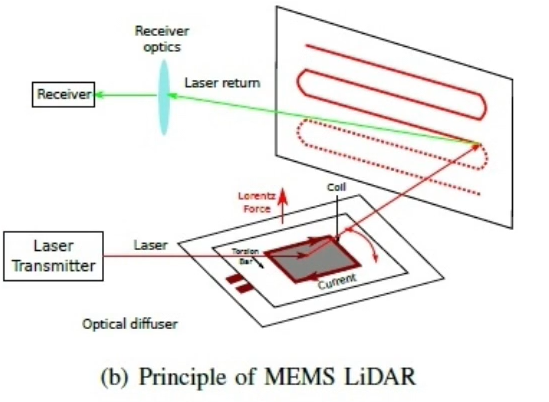
微振镜MEMS(Microelectromechanical Systems)
- 通过微振动镜反射激光
纯固态
完全取消活动部件减少震动 ,不需要获得部件,依靠电子部件控制旋转角度
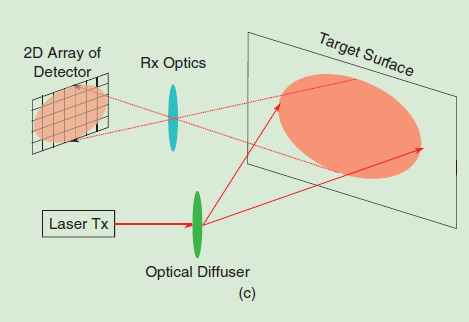
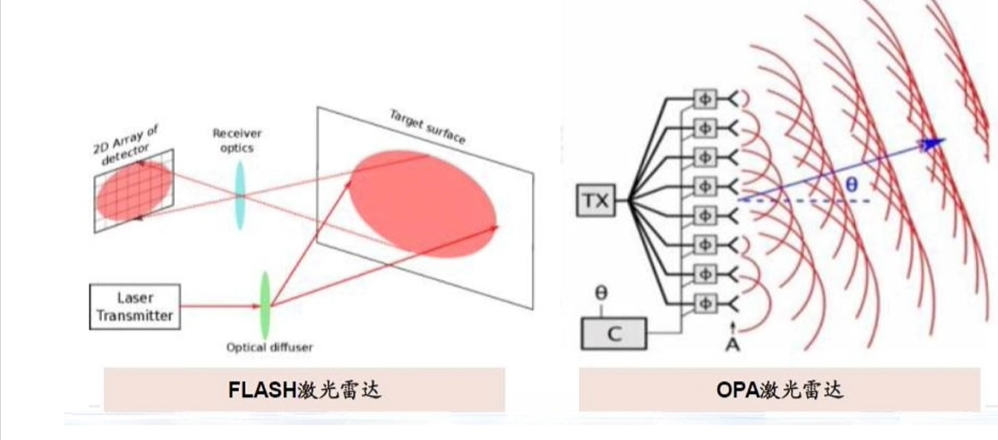
Flash式
- 通过光学扩散镜打出一个面,功率下降,距离下降
光学相控阵式
- 受到质疑
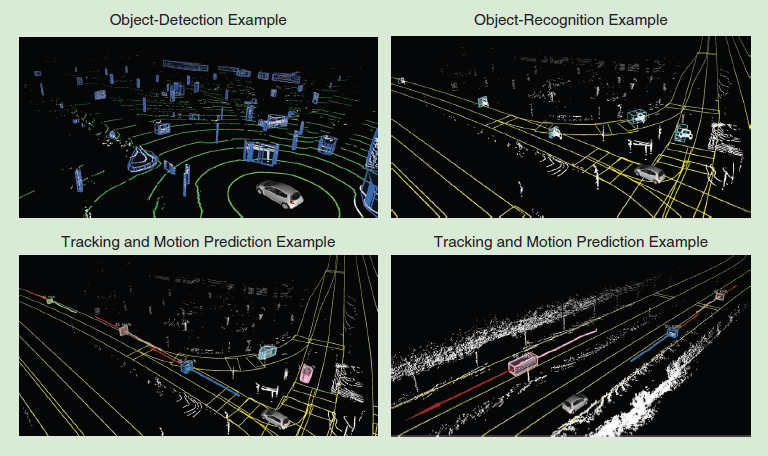
激光雷达应用
- 目标检测
- 目标识别
- 运动追踪及预测物体
激光雷达劣势
- 成本较高
- 探测距离有限
- 雨雪雾霾天气会影响性能
- 体积较大,集成度较低,寿命短
赛道玩家
- Avea:FMCW,奥迪
- Velodyne:机械、转镜,现代、福特
- Luminar:1550+MEMS,沃尔沃
- 禾赛科技: 转镜,理想、小鹏
参考资料
- 超快速,超简单,5分钟了解激光雷达基础原理的线束,视场角
- 题目二:车载激光雷达:从原理到应用, 李铀博士(上)
- 走进自动驾驶传感器(一)——激光雷达
- 用动画解释TOF单线激光雷达工作原理
- 详解激光雷达(完整版)
- 预见2023:《2023年中国激光雷达行业全景图谱》(附市场现状、竞争格局和发展趋势等)
- MEMS激光雷达技术的发展与落地
- 禾赛 FT120 纯固态激光雷达亮相 CES 2023,将于下半年开始交付
- 行研笔记_LIDAR(2):转镜与MEMS
- 一文看懂激光雷达LIDAR基本工作原理
- 自动驾驶传感器之激光雷达(四)主流激光雷达工作原理介绍
- 预见2023:《2023年中国激光雷达行业全景图谱》(附市场现状、竞争格局和发展趋势等)
- Li, You, 和Javier Ibanez-Guzman. 《Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems》. IEEE Signal Processing Magazine 37, 期 4 (2020年7月): 50–61. https://doi.org/10.1109/MSP.2020.2973615.
- Royo, Santiago, 和Maria Ballesta-Garcia. 《An Overview of Lidar Imaging Systems for Autonomous Vehicles》. Applied Sciences 9, 期 19 (2019年9月30日): 4093. https://doi.org/10.3390/app9194093.
- McManamon, Paul F., Paul Banks, Jeffrey Beck, Dale G. Fried, Andrew S. Huntington和Edward A. Watson. 《Comparison of Flash Lidar Detector Options》. Optical Engineering 56, 期 3 (2017年3月7日): 031223. https://doi.org/10.1117/1.OE.56.3.031223.














 4037
4037











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









