







一、硬件准备
57步进电机在市面上还是挺常见的,每一款都大同小异。而市面上最为常用的为两相四线制的步进电机。两相即AB相,四线即步进电机引出来的四根线。
HTS-884A步进电机驱动器

步进电机实际上是按着一定的频率,分别去给线圈上电,最后使其转起来,但我们有了驱动器就不需要考虑这么多了,里面已经帮我们把所需的电路集成好了,这里我们只需要会连线就行了。
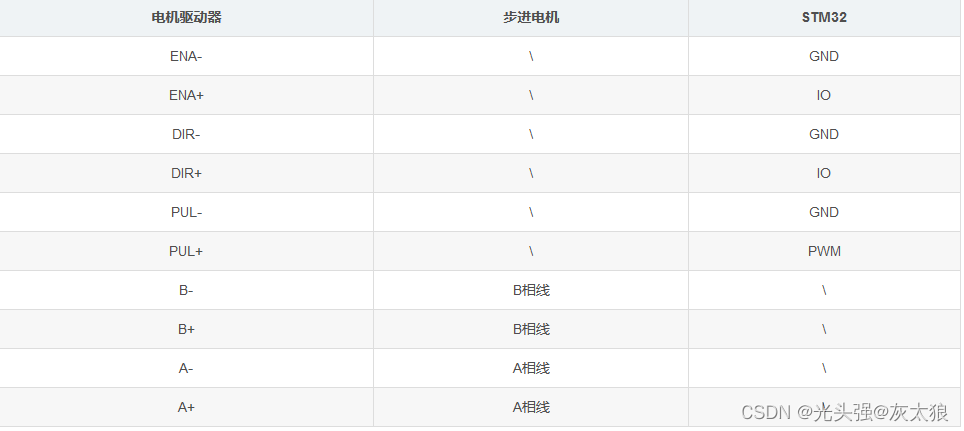
其中还有的VCC接购买的步进电机所需的电压值
其中ENA,DIR,PUL的接线有两种,一种是共阳,另一种是共阴接法,共阳即将ENA+,DIR+,PUL+都接3.3V的口,而共阴接法则由上表格所示。
ENA为使电机脱机状态控制端子
若按上述接线,当ENA+赋予高电平时,电机处于脱机状态,手可以转动转轴,电流撤去。故一般工作情况,ENA+要赋予低电平。
DIR为控制步进电机正反转的控制端子
按上述接线,当DIR+赋予低电平时,默认为反转,DIR+赋予高电平时,默认为正转,可以通过控制这个端子去控制步进电机按照指定方向运作
PUL为脉冲控制端子
PUL为控制步进电机最为关键的端子。而在介绍PUL前,还需要介绍一个步进电机的基础知识,即细分和步距角。
步距角:输入一个电脉冲信号,步进电动机转子相应的角位移。
即说明,给一个PWM波,步进电机转子转过的角度。对于1.8°步距角的步进电机来说,转一圈则需要360/1.8=200个脉冲
步进电机细分技术:细分通俗易懂的说就是将上面所说的需要200个脉冲转一圈变成需要更多的脉冲才能转一圈了,如果是二细分,则为400个脉冲转一圈。
其中脉冲信号我们从PUL+中输入,而细分,则由驱动器上的说明设置
二、代码部分
main.c
#include "system.h"
#include "led.h"
#include "SysTIck.h"
#include "usart.h"
#include "key.h"
#include "motor1.h"
int main()
{
//u16 period = 500;
int j;
SysTick_Init(72);//ϵͳ³õʼ»¯£¬Ñ¡ÔñʱÖÓÀ´Ô´£¬ÏµÍ³Ê±ÖÓÔΪ72£¬µ÷ÓÃÑÓʱº¯Êý
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();
KEY_Init();
//MY_EXIT_Init();
USART1_Init(9600);
//MOTOR_Init();
//MOTOR_PWM_Init(period,12-1);//per,ÖØ×°Öµ£¬¿ØÖÆÖÜÆÚ£¬12-1¿ØÖÆƵÂÊ
//TIM_SetCompare2(TIM3,period/2);//Õ¼¿Õ±ÈÒ»¶¨£¬£¨1/2£©µÄÖØ×°ÖµÊä³ö·½²¨
Motor_Pin_Init();
while(1)
{
j++;
if(j%20==0)
{
led2=!led2;
}
if (KEY_SCAN(0) == KEY_UP)
{
led1=0;
delay_ms(1000);
delay_ms(1000);
led1=1;
MOTOR_DIR_CCW;//¸Ä±äDIR¸ßµÍµçƽ£¬¼´¸Ä±äתÏò
Step_90_Degrees();
}
if (KEY_SCAN(0) == KEY_DOWN)
{
led3=0;
delay_ms(1000);
delay_ms(1000);
led3=1;
MOTOR_DIR_CW;
Step_90_Degrees();
}
}
}
motor1.c
#include "motor1.h"
#include "led.h"
int i = 0;
void Motor_Pin_Init(){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(MOTOR_DIR_CLK | MOTOR_PUL_CLK | MOTOR_ENA_CLK, ENABLE);
/*PE5¶ÔÓ¦DIR,ĬÈÏ˳ʱÕëÐýת*/
GPIO_InitStructure.GPIO_Pin=MOTOR_DIR_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //ÉèÖÃΪ¸´ÓÃÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(MOTOR_DIR_PORT,&GPIO_InitStructure);
GPIO_ResetBits(MOTOR_DIR_PORT,MOTOR_DIR_PIN);
/*PE6¶ÔÓ¦ENA,ĬÈÏΪ¸ßµçƽ£¬²»»áʹÄÜ*/
GPIO_InitStructure.GPIO_Pin=MOTOR_ENA_PIN;
GPIO_Init(MOTOR_ENA_PORT,&GPIO_InitStructure);
GPIO_ResetBits(MOTOR_ENA_PORT,MOTOR_ENA_PIN);
GPIO_InitStructure.GPIO_Pin = MOTOR_PUL_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //ÉèÖÃΪ¸´ÓÃÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(MOTOR_PUL_PORT, &GPIO_InitStructure);
GPIO_ResetBits(MOTOR_PUL_PORT, MOTOR_PUL_PIN);
}
void Delay(__IO uint32_t nCount){
for (; nCount != 0; nCount--)
;
};
void Step_90_Degrees(){
// NC = 1600, 800 toggles means 90 degree motor rotation
for (i=0; i < 3200; i++)
{
MOTOR_PUL_Toggle;//
// The delay time determines the motor speed
Delay(0xfff);
}
i=0;
}
motor1.h
#ifndef __motor1_H
#define __motor1_H
#include "system.h"
#define MOTOR_DIR_PORT GPIOE
#define MOTOR_DIR_PIN GPIO_Pin_5//DIR+¶ÔÓ¦PE5
#define MOTOR_DIR_CLK RCC_APB2Periph_GPIOE
#define MOTOR_PUL_PORT GPIOA
#define MOTOR_PUL_PIN GPIO_Pin_7//PUL+¶ÔÓ¦PA7
#define MOTOR_PUL_CLK RCC_APB2Periph_GPIOA
#define MOTOR_ENA_PORT GPIOE
#define MOTOR_ENA_PIN GPIO_Pin_4//ENA+¶ÔÓ¦PE4
#define MOTOR_ENA_CLK RCC_APB2Periph_GPIOE
#define digitalHi(p,i) {p->BSRR=i;}
#define digitalLo(p,i) {p->BRR=i;}
#define digitalToggle(p,i) {p->ODR ^= i;}
#define MOTOR_ENA_Toggle digitalToggle(MOTOR_ENA_PORT, MOTOR_ENA_PIN)
#define MOTOR_ON digitalHi(MOTOR_ENA_PORT, MOTOR_ENA_PIN)
#define MOTOR_OFF digitalLo(MOTOR_ENA_PORT, MOTOR_ENA_PIN)
#define MOTOR_PUL_Toggle digitalToggle(MOTOR_PUL_PORT, MOTOR_PUL_PIN)//ʹ¸ÃÒý½Å¸ßµÍµçƿת»»Ò»´Î£¬¼´Êä³öÒ»¸öÂö³å
#define MOTOR_PUL_ON digitalHi(MOTOR_PUL_PORT, MOTOR_PUL_PIN)
#define MOTOR_PUL_OFF digitalLo(MOTOR_PUL_PORT, MOTOR_PUL_PIN)
#define MOTOR_DIR_Toggle digitalToggle(MOTOR_DIR_PORT, MOTOR_DIR_PIN)
#define MOTOR_DIR_CCW digitalHi(MOTOR_DIR_PORT, MOTOR_DIR_PIN)
#define MOTOR_DIR_CW digitalLo(MOTOR_DIR_PORT, MOTOR_DIR_PIN)
void Motor_Pin_Init(void);
void Delay(__IO uint32_t nCount);
void Step_90_Degrees(void);
#endif

















 2408
2408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









