







文章目录
二叉搜索树
BST在二叉树的形式基础上借鉴了有序向量的特点。对有序向量的借鉴多体现在BBST。
- 循关键码访问call-by-key:数据项之间,依照各自的关键码彼此区分,关键码之间可进行大小比较以及相等比对。以下将数据集中的数据项统一表示为词条entry。
词条应包含:模板类、关键码、键值、默认构造函数、克隆函数、比较器、判等器,并将磁条的比较转化为key的比较。 - 顺序性:任一节点均不大于其父节点。
- 单调性:BST的中序遍历必单调且非降。
查找
采用分而治之的策略,逐步缩小搜索范围,直至找到。
template<typename T> BinNodePosi(T) & BST<t>::search(const T &e)//对外接口
{
return searchIn(_root, e, _hot=NULL);
}
static BinNodePosi(T) & searchIn(BinNodePosi(T) &v, const T & e, BinNodePosi(T) &hot)//当前子树根,目标关键码、记忆热点
{
if(!v || (e == v->data))
return v;
hot = v;
return searchIn((e < v->data ? v->lchild : v->rchild), e, hot);
}
时间复杂度不超过O(n)。
返回值语义:
- 成功时,返回一个关键吗为e且存在的节点
- 失败时,返回最后一次试图转向的空节点nullptr
_hot变量语义:
- 失败时,假象将空节点转换为一个关键码为e的哨兵节点
- 无论成功与否,_hot总指向命中节点的父节点,返回值总是指向命中节点
插入
由于调用searchIn函数后,其返回值正是我们将要插入元素的位置(假设无重复节点),则我们将待插入元素封装为一个节点,将返回值引用指向该节点。
template<typename T>BinNodePosi(T) BST<T>::insert(const T &e)
{
BinNodePosi(T) &x=search(e); //查找目标,留意_hot位置
if(!x)
{
x=new BinNode<T>(e._hot); //在x出创建节点,以_hot为父节点
_size++;
updateHeightAbove(x);
}
return x;
}
删除
template<typename T>bool BST<T>::remove(const T &e)
{
BinNodePosi(T) &x=search(e); //定位目标节点
if(!x) //确认目标存在
return false;
removeAt(x,_hot); //两类情况删除
_size--;
updateHeightAbove(_hot); //更新_hot以及树高
return true;
}
情况一
目标节点至多只有一颗子树,删除节点,用其子树根节点代替节点位置。
template<typename T>static BinNodePosi(T) removeAt(BinNodePosi(T) &x, BinNodePosi(T) hot)
{
BinNodePosii(T) w=x; //实际被摘除节点
BinNodePosi(T) succ=NULL; //实际被摘除节点接替者
if (!HasLChild(*x)) succ=x=x->rchild;
else if(HasRChild(*x)) succ=x=x->rchild;
else{ /* 左右子树均存在 */}
hot=w->parent; //记录实际被摘除节点的父节点
if(succ) succ->parent=hot; //将接替者与hot相连
release(w->data); //释放被摘除节点
release(w);
return succ;
}
情况二
目标节点有两颗子树。将情况转化为情况一。
接口BinNode::succ();返回当前节点的直接后继,其思路是在当前节点右孩子存在的情况下,从右孩子的左孩子进入不断访问其左孩子,直至左孩子不存在,直接后继指不小于当前节点的最小节点。

思想:将待删除节点与其直接后继交换,再删除交换后的但删除节点,此时与情况一一致。
else
{
w=w->succ();
swap(x->data,w->data);
BinNodePosi(T) u=w->parent;
(u==x ? u->rChild : u->lChild) = succ =w->rChild;
//u==x,即是待删除节点的直接后继就是他的右孩子的情况
}
平衡与等价
BST的平均树高为
O (logn)
为了更快的搜索速度,我们要尽可能的缩小树高,当节点数目相同时,兄弟子树的高度越接近,全树的树高也就越小。但BST树的最小高度不低于
O(long[2]n)
也称上述树高为理想平衡,但理想平衡难以达到,且维护成本极高。
旋转变换
经过某种改变BST的拓扑结构,但变换后的树与之前的树等价。

AVL树 一种BBST
定义平衡因子,balFac(v) = height(lc(v)) - height(rc(v))即是左子树与右子树高度之差。
根据AVL树的定义,有
\forall[v], |balFac(v)| <=1
高度为h的AVL树,至少包含下述个节点。
S(h) = fib(h+3)-1
AVL树接口
#define Balanced(x) stature(x.lChild)=stature(x.rChild) //理想平衡
#define BalFac(x) stature(x.lChild)-stature(x.rChild) //平衡因子
#define AvlBalanced(x) (-2<BalFac(x)) && (BalFac(x)<2)
template<typename T>class AVL: public BST<T>
{
public:
BinNodePosi(T) insert(const T &);
bool remove(const T &);
}
失衡与重平衡
删除节点至多只会导致一个祖先节点失衡。
插入后重平衡
单旋
同时有多个失衡节点,但最低者g不低于x的祖父。做一次zig或者zag操作。

- 1)创建临时变量p
- 2)使p的左子树成为g的右子树
- 3)使g成为p的左子树
- 4)使子树根指向p
- 5)释放临时引用
在局部恢复平衡后,其他失衡节点也会重平衡。
单旋只涉及局部常数个节点,其时间复杂度为O(1)。
双旋
同时有多个失衡节点,但最低者g不低于x的祖父。做两次zig或者zag操作。

- 1)创建临时变量v
- 2)使v的右子树成为p的左子树
- 3)使p的左子树成为v的右子树
- 4)使p成为v的右子树
- 5)使v的左子树成为g的右子树
- 6)使g成为v的左子树
- 7)使v成为子树根
- 8)释放临时引用
算法实现
template<typename T> BinBodePosi(T) AVL<T>::insert(const T &e)
{
BinNodePosi(T) &x=search(e);
if(x) //若目标尚不存在
return x;
x=new BinNode<T>(e, _hot);
_size++;
BinNodePosi(T) xx=x; //则创建x
for(BinNodePosi(T) g = x->parent; g; g=g->parent) //从x出发,逐层向上检查各代祖先g
{
if(!AVLBalanced(*g) //发现失衡,则恢复
{
FromParentTo(*g) = rotateAt(tallerChild(tallChild(g)));
break;
}
else //否则,在仍然平衡的祖先处恢复高度
updateHeight(g);
}
return xx;
}
删除后重平衡
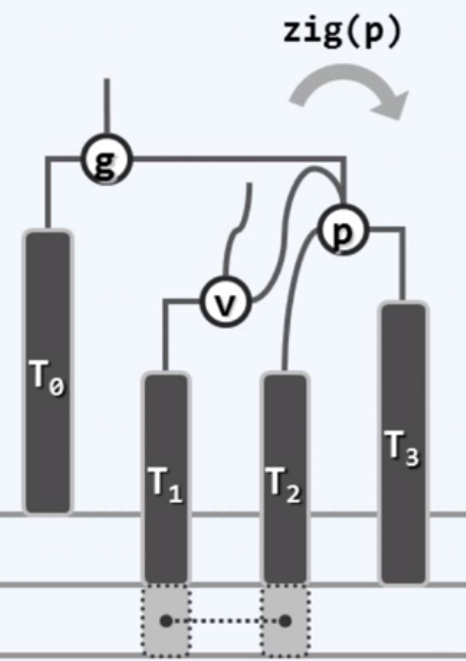
单旋
同时至多只有一个失衡节点,首个有可能的即是x的父节点_hot。
如下图所示,若g,p,v三代节点按同一方向排列,删除T3最底层节点,则需对节点g做zig(或zag)旋转。
其中T0和T1的最底层叶子至少存在一个,T2最底层叶子可存在或不存在。

观察可知,做旋转操作后,子树的树高又T2的最低成叶子是否存在决定,若存在,则子树的整体树高不变,若不存在,则导致子树的树高-1,此时,子树的祖先节点可能由于本次旋转操作而失衡。
因为上述的失衡传播现象,可能要做O(logn)次调整(对每一层进行一次调整),这是删除操作的特点。
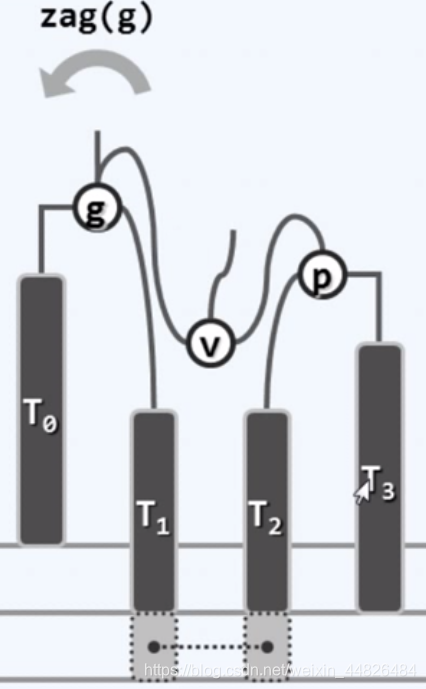
双旋
同时至多只有一个失衡节点,首个有可能的即是x的父节点_hot。
如下图所示,若g,p,v三代节点按之字形排列,删除T3最底层节点,则需对节点g做zagzig(或zagzig)旋转。
其中T0和T1的最底层叶子至少存在一个。

可以发现,经过双旋之后,子树整体的高度缩小了一层,则导致这棵子树的所有祖先节点都可能发生了失衡,可能要做O(logn)次调整(对每一层进行一次调整)。
算法实现
tepmlate<typename T> bool AVL::remove(const T &e)
{
BinNodePosi(T) &x=search(e);
if(!x) //若目标的确存在
return fasle;
removeAt(x, _hot); //则在BST规则删除之后,_hot及祖先均有可能失衡
size--;
//从_hot出发逐层向上,依次检查各代祖先g
for(BinNodePosi(T) g=_hot; g; g=g-<parent)
{
if(!AVLBalanced(*g)) //发现失衡,则进行重平衡
g=FromParentTo(*g)=rotateAt(tallerChild(tallerChild(g)));
updateHeight(g); //并更新高度
} //可能需要做O(logn)次调整全树高度可能下降
return true;
}
3+4重构
考虑到rotateAt(x,_hot)按照前述的算法也可以进行实现,但我们考虑更多的是是全树平衡,为此,我们考虑对树进行重构,而不是直接进行繁琐的旋转。
设g(x)为最低的失衡节点,考察期祖孙三代gpv,按中序遍历的次序,将其重命名为a<b<c。
可知,他们最多拥有四棵(可能为空)不相交的子树,按中序遍历将它们重命名为T0<T1<T2<T3。
观察插入单旋、双旋,删除单旋、双旋可知,我们做的重平衡操作,都是将局部子树的形式转化为下图的形式。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-juHb8UgX-1581425204802)(en-resource://database/630:1)]](https://img-blog.csdnimg.cn/20200211205411687.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NDgyNjQ4NA==,size_16,color_FFFFFF,t_70)
则我们可以直接对局部子树进行重构,使其满足上述形式。
3+4重构实现
template<typename T> BinNodePosi(T) BST<T>connect34(
BinNodePosi(T) a, BinNodePosi(T) b, BinNodePosi(T) c,
BinNodePosi(T) T0, BinNodePosi(T) T1, BinNodePosi(T) T2, BinNodePosi(T) T3)
{
a->lChild = T0; if(T0) T0->parent = a;
a->rChild = T1; if(T1) T1->parent = a; updateHeight(a);
c->lChild = T2; if(T0) T2->parent = c;
c->rChild = T3; if(T1) T3->parent = c; updateHeight(c);
b->lChild = a; a->parent = b;
b->rChild = c; c->parent = b; updateHeight(b);
return b;
}
rotateAt
为完成重构操作,我们还需做的准备是对3+4个元素进行正确的重命名。
//传入参数只有孙子节点v
template<typename T> BinNodePosi BST<t>::rotateAt(BinNodePosi(T) v)
{
BinNodePosi(T) p=v->parent; //父节点
g=p->parent; //祖父节点
if(IsLChild(*p)) //zig
if(IsLChild(*v)) //zigzig
{
p->parent=g->parent; //向上链接,更新后子树根为p
return connect(v, p, g, v->lChild, v->rChild, p->lChild, p->rChild);
}
else //zigzag
{
v->parent=g->parent; //向上链接,更新后子树根为v
return connect(p, v, g, p->lChild, v->lChild, v->rChild, g->rChild);
}
else //zag
{
if(IsRChild(*v)) //zagzag
{
p->parent=g->parent; //向上链接,更新后子树根为p
return connect(g, p, v, g->lChild, p->lChild, v->lChild, v->rChild);
}
else //zagzig
{
v->parent=g->parent; //向上链接,更新后子树根为v
return connect(g, v, p, g->lChild, v->lChild, v->rChild, p->rChild);
}
}
}
AVL总体评价
- 优点:无论查找、插入、删除,最坏情况下的复杂度为O(logn),O(n)的存储空间。
- 缺点:借助高度或平衡因子,为此需改造元素结构,或额外封装。实测复杂度与理论值尚有差距,插入\删除后的维护成本不菲,频繁的插入\删除操作使得得不偿失。
单次动态调整后,全树的拓扑结构的变化量可能高达O(longn)。















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









