



 博客讨论了A*算法在使用OpenStreetMap数据时遇到的无解问题,原因归咎于OSM数据的拓扑错误,如way要素未连接、节点缺失等。为解决此问题,提出了扩展搜索范围,考虑起始地和目的地附近所有节点的策略,以确保至少能找到一条路径。
博客讨论了A*算法在使用OpenStreetMap数据时遇到的无解问题,原因归咎于OSM数据的拓扑错误,如way要素未连接、节点缺失等。为解决此问题,提出了扩展搜索范围,考虑起始地和目的地附近所有节点的策略,以确保至少能找到一条路径。
参考文献:陈舒燕. 基于OpenStreetMap的出行可达性分析与实现[D].上海师范大学,2010.
问题:A*算法抛出异常无法找到路径(A*算法在openstreetmap中提取的数据中无法找到路径)
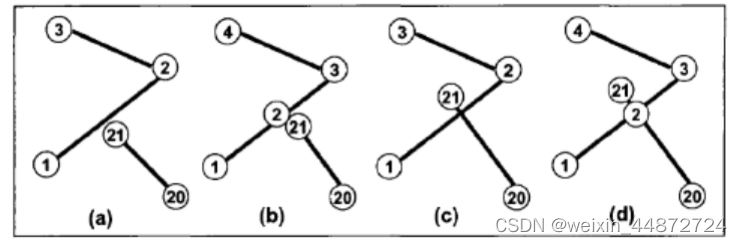
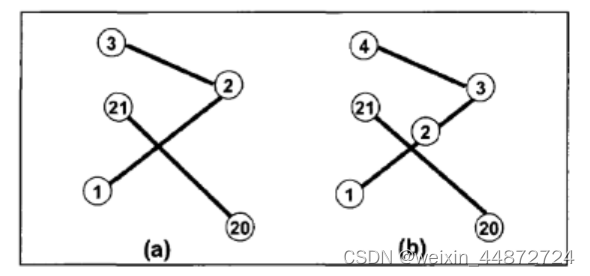
在最初,程序设置的节点搜索对象是距离起始地和目的地最近的一个节点。但是在多次模块数据测试中均出现A*算法无解的输出结果,即找不到最短路径。在查阅大量资料后知道,出现上述异常的原因在于OpenStreetMap提供的数据中存在拓扑错误。根据陈舒燕的研究,由于原始数据生成过程中的异常和VGI本身的异源性性质,这将导致OpenStreetMap中的道路数据出现way要素之间被覆盖,悬空,和扭曲等拓扑错误[17]。陈舒燕在她的文中展示了OSM部分拓扑图示,即图49和图50[17]。图49表示way要素之间距离很近但未连接,出现要素未及和悬挂的错误[17]。图50表示way要素之间明明相交却在交点处不存在node要素[17]。这意味着way要素之间在真实路网中本应该是连接相通的,但是在OpenStreetMap的数据结构中却没有连接。以及本该出现在路网中的节点node要素缺失。上述的这些拓扑错误导致在寻找距离起始地和目的地最近的节点时,有极大的可能会寻找到正在处于拓扑错误的节点node,致使A*算法出现无解的结果。
我提出的解决办法:
为了保证至少输出一个不抛出异常的最短路径方案。本模块将修改起始地节点和目的地节点的搜索对象从距离最近的节点,扩展成起始地和目的地附近一定范围内的所有节点。然后由它们两两组合,循环代入A*算法中进行路径寻找。

















 616
616

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









