






TPAMI.2022
Zhoumin Lu & Feiping Nie et al.
目录
Abstract
与传统方法相比,深度学习方法是数据驱动的,有更大的搜索空间来寻找解决方案,这可能会找到更好的解决方案。此外,损失函数可以引入更多的考虑因素,因此深度模型是高度可重用的。然而,传统方法具有更好的可解释性,其优化相对稳定。
在本文中,我们结合传统方法和深度学习方法的优势,提出了一种多视图谱聚类模型。具体来说,我们从传统谱聚类的目标函数开始,进行多视图扩展,得到传统的优化过程。然后,通过对这一过程进行部分参数化,我们进一步设计了相应的可微模块,最终构建了一个完整的网络结构。该模型具有一定的可解释性和可扩展性。实验表明,该模型比其他多视图聚类算法性能更好,其半监督分类扩展也比其他算法具有优异的性能。进一步的实验也表明了模型训练的稳定性和较少的迭代。
Introduction
多视图学习侧重于从不同的角度发现共同的模式,这有助于提高性能。对于一个视频来说,它的文本、音频和图像可以被视为三个视角。对于图像,其颜色特征和纹理特征可以作为多个视角进行查看。对于一个文档来说,它来自多个来源的文本描述可以看作是几个角度。即使是各种降维方式和众多的图构建手段也可以被视为不同的视角。多视图聚类不仅是多视图学习的一个重要分支,也是单视图聚类的一个显著扩展。
近年来,深度聚类受到了极大的青睐。由于其较大的参数空间,可以搜索到良好的低维表示。由于它利用损失函数来指导学习,因此深度模型具有显著的可重用性。即便如此,传统聚类仍然具有很大的研究价值,受到许多领域的青睐。由于传统聚类具有显著的可解释性和理论支持,因此它的输出可靠性是有保证的。由于其优化方向保持相对固定,因此在训练过程中保持相对稳定,不易出现不可接受的情况.
在本文中,考虑到传统和深度学习方法的特点,我们提出了一种具有灵活扩展的多视点谱聚类模型。该模型以传统优化为基础,以部分参数化为手段,以网络结构为主体,以损失函数为指导,利用神经网络的优势,成为谱聚类的改进版本。这项工作的贡献总结如下:
- 从多视图学习的角度出发,我们提出了一种新的多视图聚类模型。它也可以应用于只有一个额外损失函数的多视图半监督分类问题。理论和实验分析表明,我们的模型具有许多良好的财产:迭代次数少、训练更稳定、性能更好、标签依赖性更低等。此外,由于超参数少且不敏感,该模型可以更容易地用于不同的数据集。
- 从模型重用的角度来看,通过简单地修改激活函数和/或损失函数,我们的模型还可以解决多视图聚类以外的问题,如半监督分类、非负矩阵分解、主成分分析、深度聚类等。由于其模块化性质,它可以很容易地嵌入到其他应用程序中。此外,模块化允许修改激活函数,而无需遍历整个模型。
- 从可解释模型的角度来看,我们直接构建了一个透明模型,而不是解释一个黑盒。该模型建立在传统优化过程的基础上,因此是可以自然解释的。此外,我们还对局部参数化进行了多方面的理论分析,使每一步都有充分的依据。消融研究进一步证明了我们模型的合理性和有效性。
Method
所提出的方法分为五个部分:问题公式化、可微框架、损失函数、可扩展性和可解释性。
Formulation
非负谱聚类(对称谱聚类)可以写作以下形式:
min
F
≥
0
∥
W
−
F
F
⊤
∥
F
2
\min_{F\geq 0} \|W-FF^\top\|_F^2
F≥0min∥W−FF⊤∥F2
其中W为affinty graph,F为nxk维的聚类指示矩阵。这是一种轻松的子图划分形式,通常性能更好,但解决起来相对麻烦。可以重写如下对称谱聚类:
其中,G可以被看作nxk维的聚类中心矩阵。本质上,这是通过邻接关系的广义k-means,其性能通常低于前者,但求解相对容易。一个简单半谱聚类半k-means的折衷方案如下:

当
λ
\lambda
λ项足够大,我们就接近了原始的非负谱聚类;而当
λ
=
0
\lambda=0
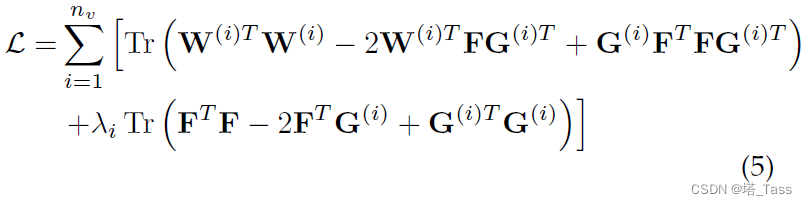
λ=0时则为广义k-means。接下来我们把目标函数扩展到多视图:

每个视图的聚类中心不一致但子图划分应当是一致的。
λ
i
\lambda_i
λi为第i个视图下的权重
Differentiable Framework
首先我们先不考虑非负约束,上式改写为
对
G
i
G^{i}
Gi求偏导得到:

在无约束情况下求解到的
G
(
i
)
G^{(i)}
G(i)为:

然后我们利用ReLU让
G
(
i
)
≥
0
G^{(i)}\geq 0
G(i)≥0:

我们把其中的 ( W ( i ) ⊤ + λ i I ) F ( W^{(i)\top} +\lambda_i I)F (W(i)⊤+λiI)F项重参数化为 U ( i ) U^{(i)} U(i),那么第k次迭代规则为:

基于以上公式,我们搭建了一个 single inversion layer:
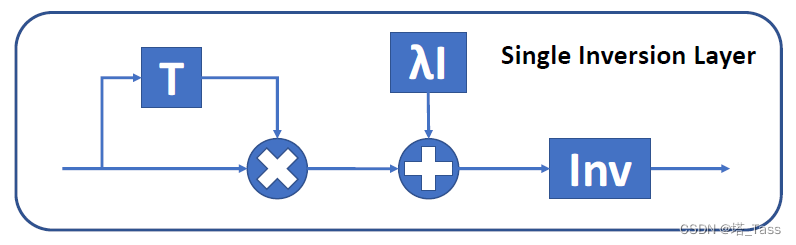
该模块用于从
F
k
−
1
F_{k-1}
Fk−1推断
G
k
(
i
)
G^{(i)}_k
Gk(i)。
我们接下来对F求偏导:

得到无非负约束下的F的解:

同样地,我们用ReLU对F施加非负约束。类似地,我们再把
∑
i
=
1
n
v
(
W
i
+
λ
i
I
)
G
(
i
)
\sum_{i=1}^{n_v}(W^{i}+\lambda_i I)G^{(i)}
∑i=1nv(Wi+λiI)G(i)项重参数化为
V
V
V:

再构建一个ensemble inversion layer,把多个视图合并起来:
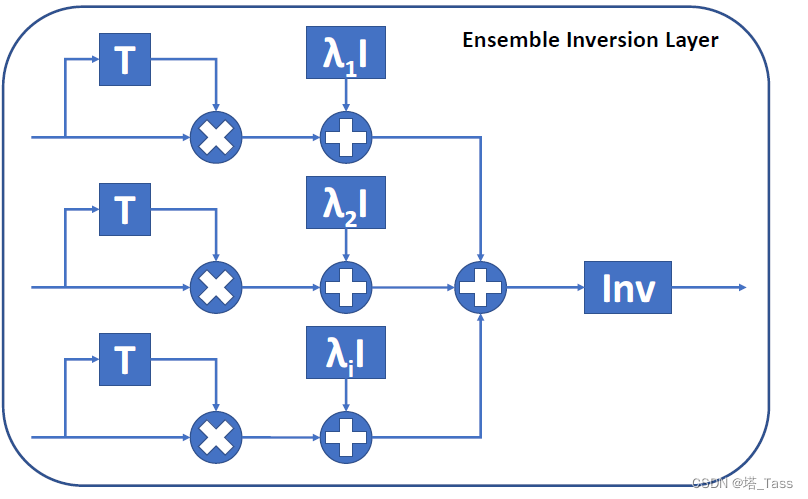
可以构建完整的网络结构,如下图所示。需要指出的是,
λ
i
\lambda_i
λi也是一个可学习的参数。

Loss function
考虑到每个视图都应该适合其相应的图结构,因此存在L1损失:

另一方面,共享的indicator矩阵应该适合包含所有视图信息的图结构,因此存在L2损失:

总损失函数为:
L
c
l
s
=
L
1
+
α
L
2
L_{cls}=L_1+\alpha L_2
Lcls=L1+αL2
在 L 2 L_2 L2中, μ \bf{\mu} μ用于给不同视图分配权重,利用参考文献的定义:
Chandler Davis and William Morton Kahan. The rotation of eigenvectors by a perturbation. iii. SIAM Journal on Numerical Analysis.
略
Flexible extentions
I) 半监督分类
对于半监督分类,需要在聚类时分配正确的标签。因此,正确的聚类指示符矩阵F应该近似于经验估计的
F
e
m
p
F_{emp}
Femp。存在L3损失:

重新排列样本顺序,使有标签的样本排在第一位,即有:
其中
F
l
F_l
Fl和
F
u
F_u
Fu分别是标记样本和未标记样本的聚类指示矩阵。虽然很常见,但将未标记的部分视为0是不合理的。此外,我们知道以下关系成立:

于是有:

所以
F
u
F_u
Fu可以由
F
l
F_l
Fl估计:

II) 非负矩阵分解
当只有单视图时,我们的损失函数退化为:

这显然是一个对称的非负矩阵分解问题,其中
a
=
1
a=1
a=1。不失一般性地,我们把
W
W
W替代为
X
X
X,不考虑对称性,上述损失函数可以改写为:
这正是非对称的非负矩阵分解。如果需要保持流形,可以采用以下损失函数:

这是图规范化的非负矩阵分解。此外,NMF的一种分级变体被广泛认可,并通过以下损失函数学习:

在这里,每个block操作都被视为分解而不是迭代。这个想法是可行的,因为由于局部参数化,F和G的更新规则不依赖于X。
III) Principal Component Analysis
原始主成分分析方法如下:

因此我们可以通过放松写成如下形式:

其中
α
\alpha
α应当设置得足够大。我们可以通过设置F和G的激活函数来调整约束。例如非负时为
R
e
L
U
(
x
)
ReLU(x)
ReLU(x),稀疏时为
s
g
n
(
x
)
(
x
−
θ
)
+
sgn(x)(x-\theta)_+
sgn(x)(x−θ)+,无约束时等于输入
x
x
x本身。
可解释性
与传统的优化算法相比,深度学习模型往往具有更好的性能。但深度学习通常很难解释,这极大地限制了对结果的可靠性评估。尽管许多工作通过设计实验或可视化中间过程来帮助理解网络,但许多领域仍然倾向于采用传统模型。这是因为深度模型的网络结构是一个复杂的非凸映射,导致训练不稳定。相反,为了稳定输出,我们提出了一系列额外的操作来进一步增加网络复杂性。与解释黑盒不同,我们使用传统的优化算法来构建网络结构。这样的网络自然是可解释的,并缩小了解决方案的搜索范围,以确保优化的正确方向。由于更新规则是部分参数化的,因此可以通过各种损失函数更灵活地学习,这被称为基于学习的优化。这相当于在传统优化中增加了计算扰动,从而扩大了解的搜索范围。
本质上,我们的方法像传统方法一样搜索收敛序列 { F t } \{F_t\} {Ft}。因此,数据通过一个block传播,类似于传统优化中的一次迭代。在传统的优化中, { F t } \{F_t\} {Ft}一旦确定就不会改变,并且序列长度是未知的。在基于学习的优化中,序列长度固定为block的数量,并且可以更新 { F t } \{F_t\} {Ft}。
复杂度
在只重参数化为U在正向/反向传播的计算复杂度为 O ( n k 2 ) \mathcal O(nk^2) O(nk2),重参数化V后在正向/反向传播的计算复杂度为 O ( n 2 k ) \mathcal O(n^2k) O(n2k)
实验
数据集

settings
在多视图聚类和分类中,我们的方法在每个数据集上都保留了相同的设置。具体地,块的数量被设置为5,并且初始值被设置为20。平衡系数 α = 1 \alpha=1 α=1和 β = 3 \beta=3 β=3。初始学习率设置为0:3,学习率每两个epoch衰减一次,衰减率为0.99。完整的训练需要使用Adam进行500个epoch。
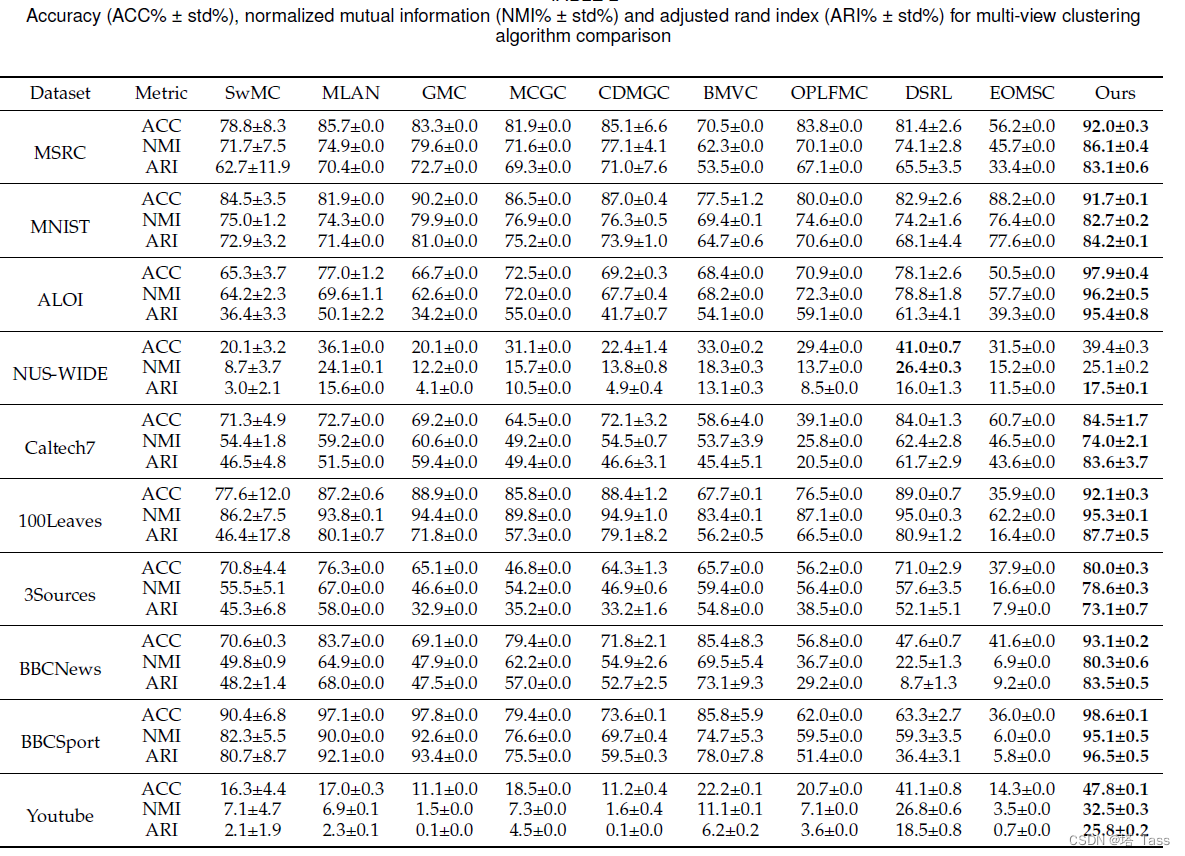
performance
无监督聚类
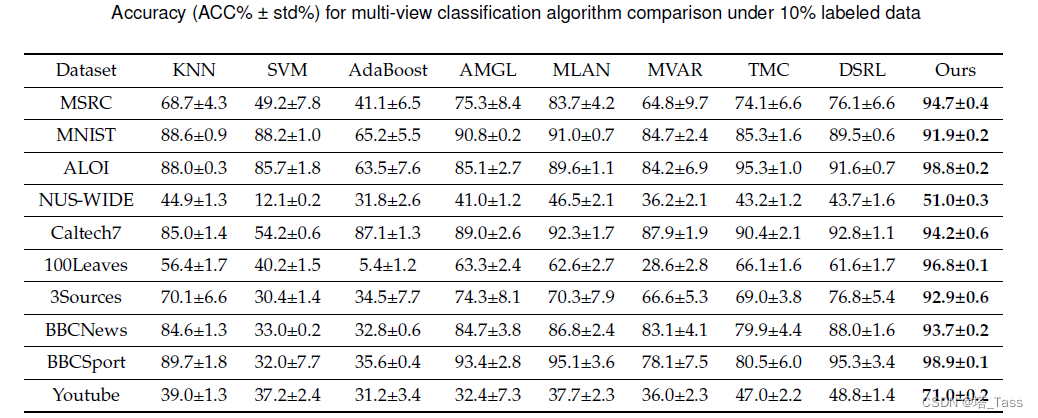
10% label半监督分类
消融实验

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









