







机器人技术可以在科学理解自我意识方面发挥有用的作用,既可以通过构建自我的具身模型,也可以通过使用机器人作为探索人类自我的实验探针。在这两种情况下,机器人的体现使我们能够设计和测试关于自我本质的假设,关于它的发展、它在行为中的表现以及人类、动物和潜在的机器中自我的多样性。https://www.science.org/doi/10.1126/scirobotics.adn2733Science Robotic 近期发表的综述论文,回顾了解决自我主题(最小自我、扩展自我和自我障碍)的机器人学研究,并强调了通过在人工系统中构建自我组成部分来理解自我的未来方向和开放挑战。一种新兴的观点是,自我的关键现象可以在机器人中产生,这些机器人具有适当配置的传感器和致动器系统,以及涉及预测模型网络的分层认知架构。 文章的主要内容包括: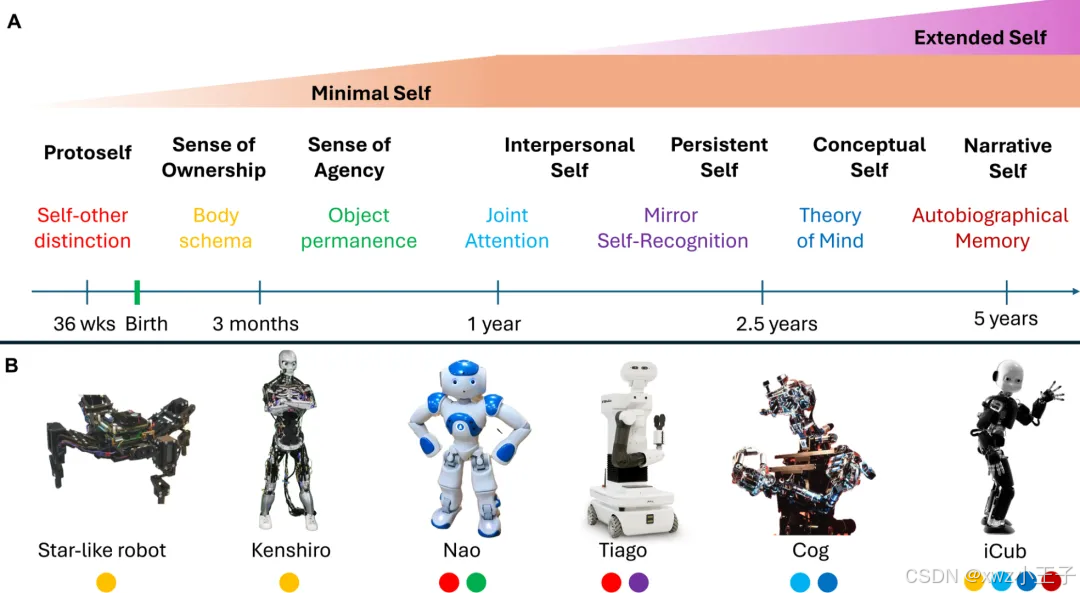
- 自我意识理论:文章回顾了关于自我意识的哲学和科学理论,强调了自我意识作为一个复杂系统,由多个相互关联的子系统组成,包括身体所有权、能动性、时间统一性等。文章区分了“最小自我”和“扩展自我”的概念。最小自我包括身体所有权和能动性,是自我意识的基础;扩展自我则包括时间定位、人际互动和叙事自我等更高级的特征。2. 机器人作为自我意识的模型:文章讨论了如何利用机器人构建自我意识的模型,并举例说明了机器人如何模拟最小自我和扩展自我的各个组成部分。文章指出,机器人可以通过模拟感觉运动整合、预测误差最小化等机制来展现自我意识的特征。
- 机器人作为研究人类自我意识的实验工具:文章探讨了如何利用机器人来研究人类自我意识,例如通过遥操作系统和机器人外骨骼来研究身体所有权,以及通过人机交互实验来研究能动性、
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









