










摘 要
摩擦引起的能量消耗是一个重要的全球性问题,促使研究人员探索先进的润滑材料。在自然界中,润滑对于动物、植物和人类的生命周期至关重要,在运动、捕食和分解中起着关键作用。经过数十亿年的发展,天然润滑展现出非凡的专业性、高效性、耐久性和智能性,为设计先进的润滑材料提供了宝贵的见解。鉴于此,兰州化物所摩擦国家重点实验室马延飞研究员与周峰研究员团队重点介绍了自然生物的润滑机理和仿生软物质润滑材料的重大进展。本文首先总结了常见的生物润滑行为及其潜在的机制,其次是仿生软物质润滑材料的当前设计策略。然后综述概述了基于不同机制和策略的这些材料的发展和性能。最后,讨论了软物质润滑材料潜在的研究方向和前景。这篇综述将是推进仿生润滑材料研究的宝贵资源。相关研究成果以题为“Tribology in Nature: Inspirations for Advanced Lubrication Materials”发表在了材料领域权威期刊《Advanced Materials》上。Chenxi Qin 和 Hao Yang为本文共同第一作者。
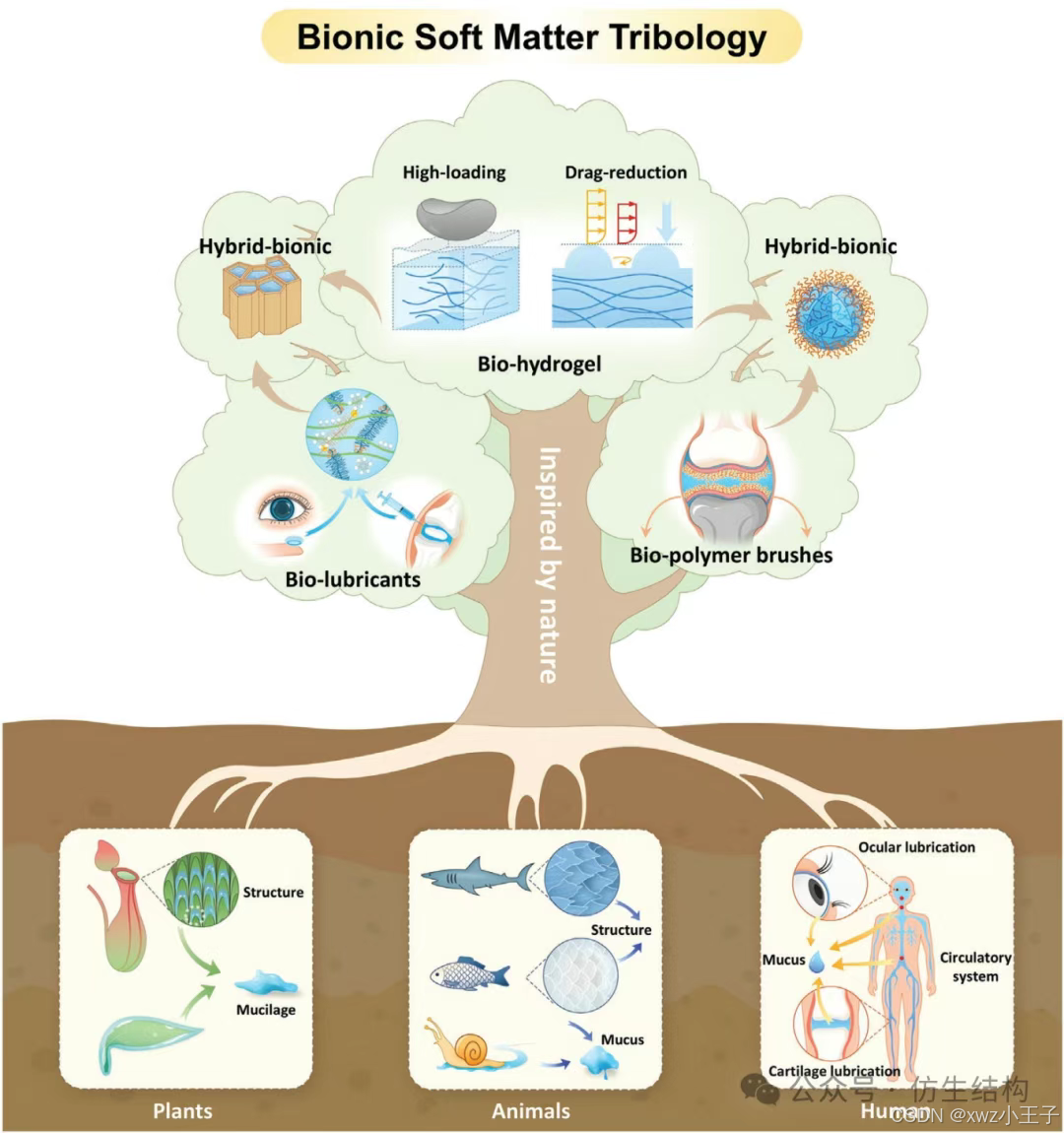
本部分摘取了该综述正文部分的主要图片,并按照正文框架排列。1. 研究背景(略)2. 自然界的生物润滑图1. 受大自然启发的先进仿生润滑软材料。2.1. 物理结构介导的润滑图2. 鲨鱼和鸟类的减阻机理。2.2.化学成分介导的润滑图3. 涉及的主要润滑机制是由粘液或黏液中存在的生物大分子介导的。a)粘液中的主要成分。b)边界润滑和水合润滑机理的说明。2.3.物理化学耦合介导的润滑图4. 物理化学耦合介导润滑的典型例子。a)猪笼草独特的水润滑诱捕系统。b)蚯蚓的适应性粘液分泌系统。c)关节软骨的润滑模型包括层状梯度结构和润滑层。3.仿生软物质润滑材料的设计原则3.1.仿生软物质润滑材料:优点、模型和性能表征图5. 润滑性能表征。a)宏观测量COF的示意图。b)在原子水平上测量COF的示意图。c)用于磨损体积视觉成像的MicroCT。经许可转载。d)监测摩擦化学反应。3.2. 构建仿生软物质润滑材料的一般程序图6. 借鉴自然实例构建仿生软物质润滑材料的系统过程。4.仿生先进润滑材料的发展4.1.仿生液体润滑图7. 仿生润滑剂。a)仿生润滑剂的主要应用包括关节润滑和眼部润滑。b)体内自润滑角膜接触镜的组分。经许可转载。c)用于治疗OA的仿生润滑剂(HA/PA和HA/PM)。 Lipo@HMs的水合润滑过程。e)用于治疗OA的超润滑载药纳米颗粒。4.2. 仿生润滑水凝胶图8. 受自然启发的仿生润滑水凝胶。图9. 仿生水凝胶的减阻机理。a)亲水表面上的固液界面减阻。b,c)疏水表面上的固-液界面减阻。图10. 仿生水凝胶减阻材料。a)PAA/PS BMA/AIN水凝胶的制备过程。b)PAA/PS BMA/AIN水凝胶在人工海水中的拉伸应力-应变曲线、杨氏模量和摩擦系数。c)润滑受北极熊肌肉启发的有机水凝胶。d)润滑有机水凝胶减阻性能的应用示范。图11. 开发水凝胶涂层的常用方法。a)保形水凝胶涂层的制备过程。b)保形水凝胶涂层的杨氏模量。c)保形水凝胶涂层的COF。d)通过液-液相转化策略制备可注射水凝胶涂层。e)可注射的水凝胶涂层可以部署在医用导管的表面上。F)可注射水凝胶涂层(QCS-CMCNa-15%-4 M)的单位宽度剥离力(F/W)对位移的代表性曲线。g)QCS-CMC na 4m-水凝胶涂层的润滑性能。图12. 从SCIRP的提出到方法的不断升级创新。a)铁基复合材料表面水凝胶原位生长示意图。b)铁基材料表面的水凝胶润滑涂层可以反复切换,可重复生长。c)基于SIL@UV-SCIRP方法制备水凝胶润滑涂层的步骤。d)PVC导管的COF和带有HPAA-PAM涂层的PVC导管。e)通过UV-SCIRP制备分层的独立性能水凝胶。f)层的总厚度相对于层数和各层厚度的变化。g)在粘合剂装饰的基底上生长水凝胶涂层的过程和机理。h)在水凝胶涂层生长之前和之后,从粘附到润滑状态的转变。I)水凝胶涂层的应用演示包括修改导管和模拟血管的内外表面。图13. 改善润滑性能,同时保持水凝胶的承载能力。a)剪切诱导仿生超分子润滑水凝胶的设计策略。b)剪切前后的COF。c)包含脂质的自润滑水凝胶的示意图。d)球在水凝胶上滑动2小时后水凝胶的磨损。e)水凝胶在0.9 MPa和往复频率2 Hz下10 000次循环的COF曲线。图14. 水凝胶被设计成具有承重和摩擦特性的区域。a)嵌入AAO中的水凝胶纳米纤维示意图。b)双层水凝胶的示意图。c)在往复频率5 Hz下施加的负载对双层水凝胶的COF的影响。d)双梯度水凝胶的示意图。e)双梯度水凝胶在经历35 000次滑动循环后的COF。4.3. 仿生润滑聚合物刷图15. 受天然软骨启发探索聚合物刷的润滑性能。a)聚合物刷的结构类型。b)带电聚合物刷和聚两性离子聚合物刷的润滑性。c)从刷子、大分子天然软骨到用聚合物刷子改性的表面。d)可重复启动且耐磨的聚合物刷示意图。e)有或没有硅溶胶层的聚合物刷表面上COF的重复引发性能。f)动态再引发研究有无硅溶胶层的润滑层表面在反应溶液中的COF变化。图16. 润滑用仿生聚合物刷修饰基底,以模仿自然滑膜关节润滑。a)水合润滑表面的超分子修复示意图。b)AFM对水合润滑表面超分子修复的COF。c)合成产生的作为润滑素模拟物的二嵌段共聚物显示模拟润滑素功能域的分子组成。图17. 梯度仿生润滑材料旨在实现对天然软骨的完全模仿,用于全关节软骨置换。a)聚合物刷@受软骨启发的坚韧水凝胶。b)聚合物刷@韧性水凝胶的SEM。c)各向异性聚合物刷与受洋葱叶启发的坚韧水凝胶的复合材料。d)各向异性聚合物刷与韧性水凝胶的复合材料中在沿T//T和T⊥T方向的不同法向载荷下的COF。e)受软骨启发的分层聚合物刷@水凝胶。f)在100k滑动循环期间,HPVA/CS-PSPMA和天然牛关节软骨的COF曲线。g)空白UHMWPE、通过传统光引发表面接枝制备的润滑涂层改性UHMWPE (UHMWPE-PMPC)和UHMWPE-HPVA/CS-PMPC的照片和局部界面接触应力状态。h)在20k滑动周期期间,UHMWPEHPVA、UHMWPE-PMPC和UHMWPEHPVA/CS-PMPC。I)UHMWPE、UHMWPE-PMPC和UHMWPE-HPVA/CS-PMPC试验区在完成20k滑动循环后的表面形态。4.4. 其他软润滑材料图18. 其他仿生软材料润滑材料。a)自然功能表面形貌复制镀膜仪示意图。b)复制涂层的表面形貌。c)复制涂层的减阻率。d)卡瓦制造过程示意图。e)作为卡瓦测试液体表面张力函数的接触角滞后数据。f)凝胶膜的合成策略和刺激响应释放的示意图。g)在不同的滑动循环下,在施加的50 kPa的法向载荷下,不同薄膜的COF。5. 仿生粘滑可切换材料图19. 机器人可以在各种场景中自适应地在粘和滑状态之间切换。在攀爬时,机器人可以自适应地调整和增加摩擦力,以确保顺利上升(蓝色车轮)。穿越陡峭的竖墙时,要及时增强附着力,防止打滑(红轮)。在下降过程中,机器人需要适当降低附着力,以最小化阻力,提高运动效率。在结冰或下雪的环境下,机器人可以自适应地减少摩擦,从滚动切换到滑动,从而实现快速移动(黄轮)。粘滑控制能力显著增强了机器人在各种情况下的适应性和机动性。图20. 湿粘着润滑一体化材料的设计与发展。a) AFM力在25和40°C下固化制造粘合剂的湿粘合力。b)摩擦可转换的材料,灵感来自鲶鱼皮的即时肌肉硬化机制。c)大跨度粘滑自由转换水凝胶。d)粘滑可切换的氟凝胶。
总 结
为了在不同的栖息环境内生长,生物进化出独特的微纳米结构和化学成分,使它们具有特殊的润滑性能,这对自我保护和生理活动至关重要。本文从自然界中的摩擦学出发,系统地讨论了各种受自然界启发的先进润滑仿生材料。对于天然仿生润滑系统,本文强调了三种主要的润滑机制: i) 由微米或纳米尺度的物理结构介导的润滑;ii) 由刷子状天然大分子占优势的化学成分介导的润滑;iii) 由物理结构和化学成分的组合介导的润滑。介绍了不同仿生润滑材料的制备方法和相关的性能表征技术。重点介绍了不同类型仿生软物质润滑材料的应用场景和最新进展。内容主要包括用于缓解润滑失效的仿生润滑剂、用于不同接触界面的仿生水凝胶、聚合物刷修饰的仿生润滑表面和其他软物质仿生润滑材料。最后,详细介绍了粘滑可切换的新兴生物纳米材料,它综合了粘滑两种极端性质。通过区分各种软物质仿生润滑材料的功能和接触界面类型,帮助研究人员更好地了解不同仿生润滑剂的制备原理和应用方向。该综合框架不仅有助于更有针对性地开发相应的仿生润滑材料,也为后续不同类型仿生润滑材料的交叉杂交以进一步增强功能奠定了基础。未来的研究可以进一步优化基于这些不同类型材料的设计理念,探索杂化仿生润滑材料新组成的可能性。图21. 先进润滑仿生材料展望。
文献信息:10.1002/adma.202420626


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









