










对于飞行昆虫,从飞行到表面运动的过渡需要有效的着陆机动,以便在各种表面上稳定着陆。昆虫的着陆行为多种多样,有些昆虫使用更受控的飞行方法着陆,而另一些昆虫则抑制与身体部位的碰撞冲击。哈佛大学近期提出了一种机械和控制相结合的方法,以实现扑翼微型飞行器的安全和准确着陆。相关成果发表在Science Robotics,并选为封面论文。
对于机械着陆方法,从生物飞行的腿中汲取灵感,设计了有损柔顺的腿,在表面碰撞期间最大限度地提高能量耗散。同时探讨了顺应性腿部设计中的三个特征:腿部站姿、关节数量和关节放置。对于着陆的控制方法,挑战在于克服地表附近的空气动力学地面效应。利用撞击过程中的柔顺腿设计,设计了撞击前的行为,从昆虫着陆轨迹中汲取灵感,以提高着陆成功率。拟议的受控着陆序列包括从悬停开始的初始加速,然后向目标减速,以非零冲击速度结束,类似于在昆虫中观察到的情况。最后,使用昆虫级拍翼空中微型机器人平台 (Harvard RoboBee),验证了在自然地形上的受控、安全和准确着陆。
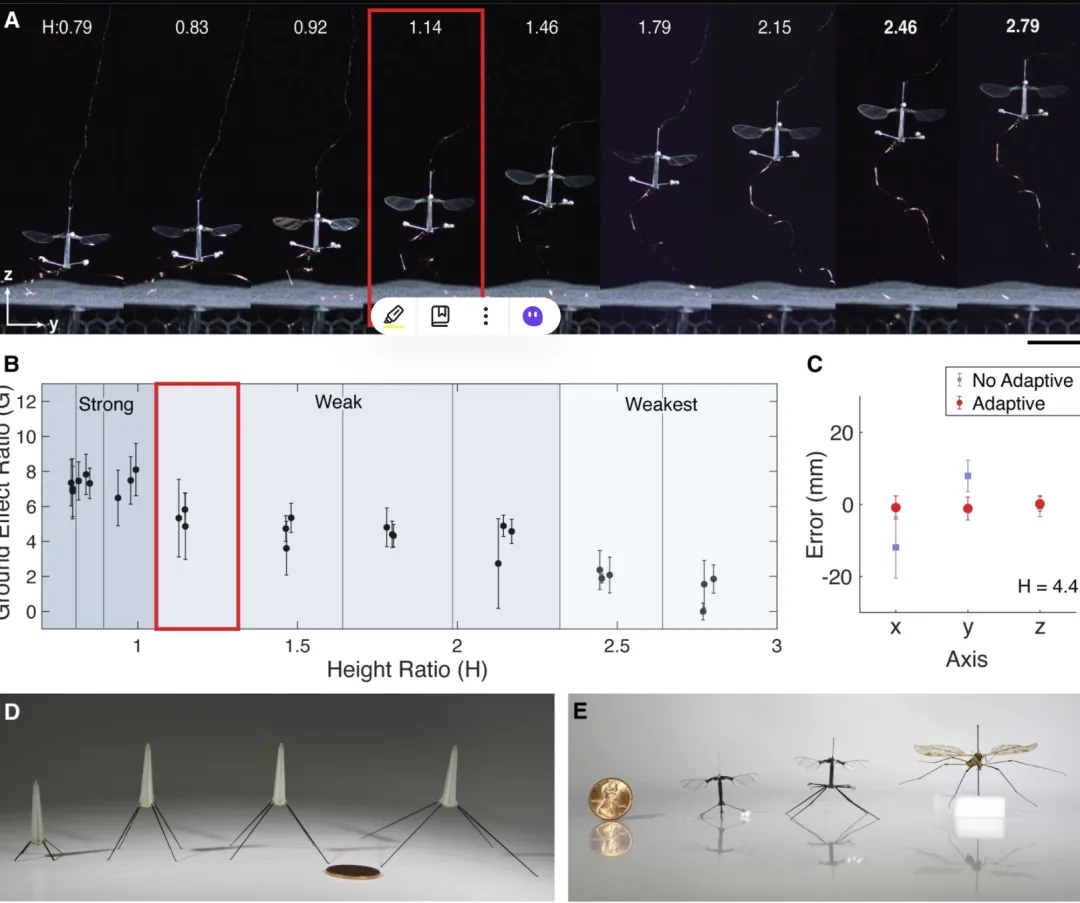
哈佛 RoboBee 提供了一个示例性物理模型,用于实验研究昆虫尺度的地面效应。RoboBee 最近实现的完全姿态控制可以提高悬停期间的精度 ,同时保持航向角。然而,控制器的设计假设 FWMAV 在没有任何干扰(无地面效应)或模型参数不确定性的情况下运行。因此,当车辆受到地面效应的影响时,不能保证类似的性能。因此,开发了一种自适应控制器,扩展了以前的控制器,使其能够补偿模型的不确定性和持续的外部干扰。图 1C 显示了自适应控制与非自适应控制的性能比较,它展示了通过补偿模型不确定性来提高横向控制精度。根据目标高度,结果表明自适应控制器控制不同的推力值,这为量化地面效应提供了机会。
FWMAV 的低质量和小尺寸使其适合在自然地形中的精细表面上着陆和探索,而不会破坏其环境。柔顺腿设计为 FWMAV 提供了一种简单的机械解决方案,以实现在自然地形上稳健着陆的艰巨任务,为未来的应用开辟了可能性,例如环境监测、监视或纵脆弱生物。柔顺的支腿不仅使 FWMAV 能够稳健地降落在各种表面上,而且它们的能量耗散特性也有助于延长车辆的使用寿命。用于微型机器人的压电致动器的主要缺点是其脆性和低断裂韧性。柔顺性腿通过刻意选择腿部姿势和腿部关节阻尼材料来增加着陆成功的包络线,从而有助于保护精密的压电致动器在碰撞着陆过程中免受碰撞引起的断裂。此外,新型腿设计为未来腿关节驱动的可能性提供了一个平台。这可以通过小型软致动器(如介电弹性体致动器)来实现,这些致动器采用类似于我们的阻尼接头设计的层压板制造工艺制造,由柔顺的粘弹性材料制成,可以根据我们当前阻尼接头设计所需的阻尼特性进行调整。致动关节将为多模式运动或作、着陆失败时的自动扶正能力以及飞行过程中对腿的主动控制开辟可能性,以控制腿的振荡行为,正如在这项工作中进行的飞行实验中观察到的那样。
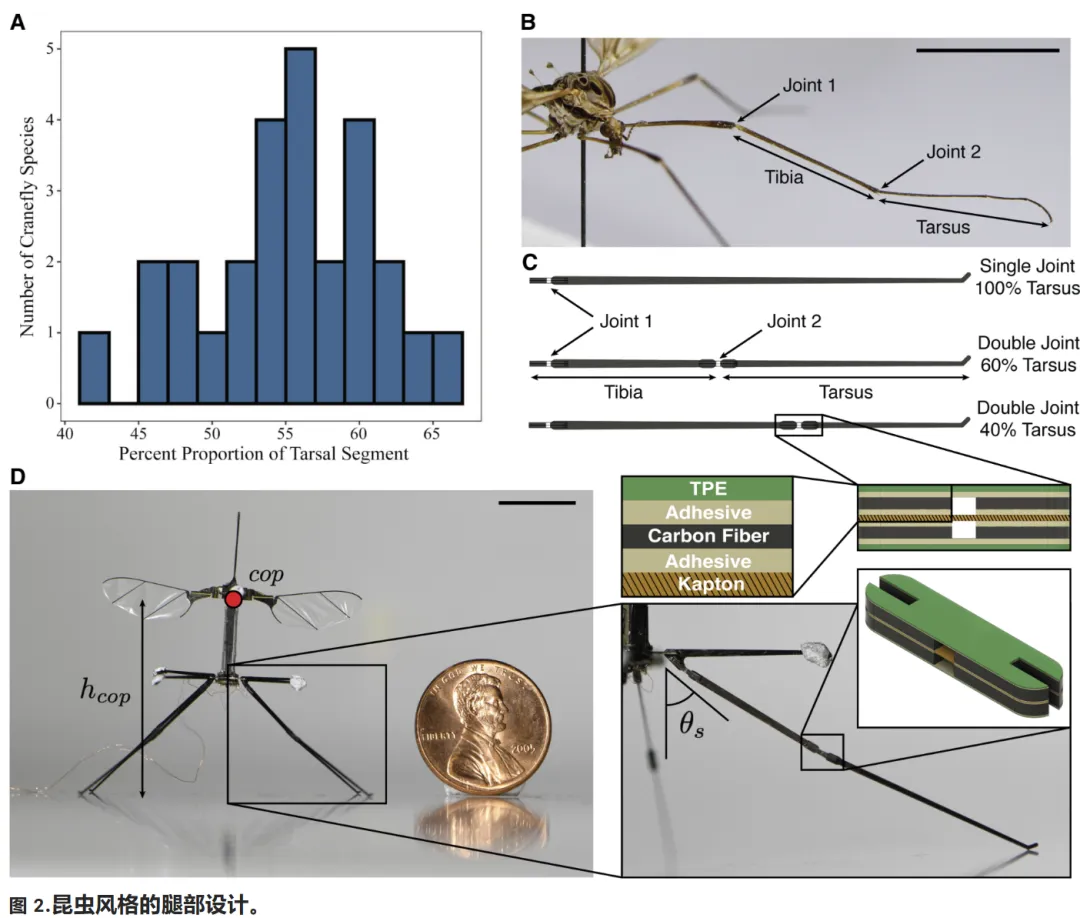
除了促进 FWMAV 的安全着陆外, RoboBee 平台还突出了探索生物学问题的有趣工具。尽管来自生物有机体的适应可以为工程师提供对有效仿生设计的见解,但生物学家也可以使用基于工程的方法为生物力学研究生成合适的物理模型。昆虫的腿在形式和功能上非常多样化,目前的研究只是对腿关节材料和节段长度的初步探索。例如,昆虫跗节通常被细分为多个节段,并带有额外的关节,从而产生高度灵活的肢体,便于在陆地上运动、进食和着陆等任务。这些跖蝣的分布和大小在不同群体之间差异很大,未来的工作可以探索额外关节的集中如何促进在不同着陆机动和不同地形期间着陆。除了着陆研究之外,RoboBee 组件(可拆卸的腿、机翼、机身和执行器)的模块化还产生了一个适应性强的平台,可用于探索与昆虫飞行相关的其他感兴趣参数(例如机翼设计和着陆表面连接装置)的比较研究。
尽管所提出的机械和算法方法提高了昆虫级扑翼飞行器的着陆成功率,但要确保在不同的基材上稳健着陆,还有一些额外的挑战。首先,当落在不平坦(倾斜)的表面上时,有损柔顺关节的作用仍然是一个悬而未决的问题。我们相信,一条有前途的路线可能涉及在腿与基板碰撞期间进行主动控制,以进一步补偿与崎岖或不平坦地形相互作用的干扰。其次,可以研究在无刺蜂 和蚊子 的着陆策略中观察到的更高冲击速度的着陆稳健性,以进一步调整多节节的机械阻尼。第三,应研究所提出的方法对大型车辆的可扩展性。随着车辆尺寸的增加,绝对有效载荷通常也会增加,这可能为探索更复杂的腿部几何形状以及致动关节和主动或被动粘附机构的集成提供机会。缩放指标可用于指导此类研究,例如,着陆机构质量分数和整体飞行器阻尼比。最后,在更大规模的情况下,可以通过集成机载传感器包来协助完全着陆自主,以实现低延迟状态反馈。
总之,这里提出了一个仿生集成框架,以克服昆虫级扑翼飞行器的一些着陆挑战。该框架提供了有关如何在主动控制系统的同时最大限度地提高着陆碰撞期间的能量耗散的见解。我们相信,具有多关节段和着陆过程中主动控制的被动能量耗散的基础可以更广泛地应用于研究在环境物体附近运行的扑翼飞行器的接触丰富任务。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









