







自动驾驶产品经理
核心:定义自动驾驶系统的行为
➡️ 挖掘人类驾驶习惯的本质,给出明确没有歧义的,可以被验证,可以被实现的需求【图森未来】
🔴 驾驶员辅助系统大多是与主动安全性有关的系统,用于避免发生交通事故。
驾驶员行为模型
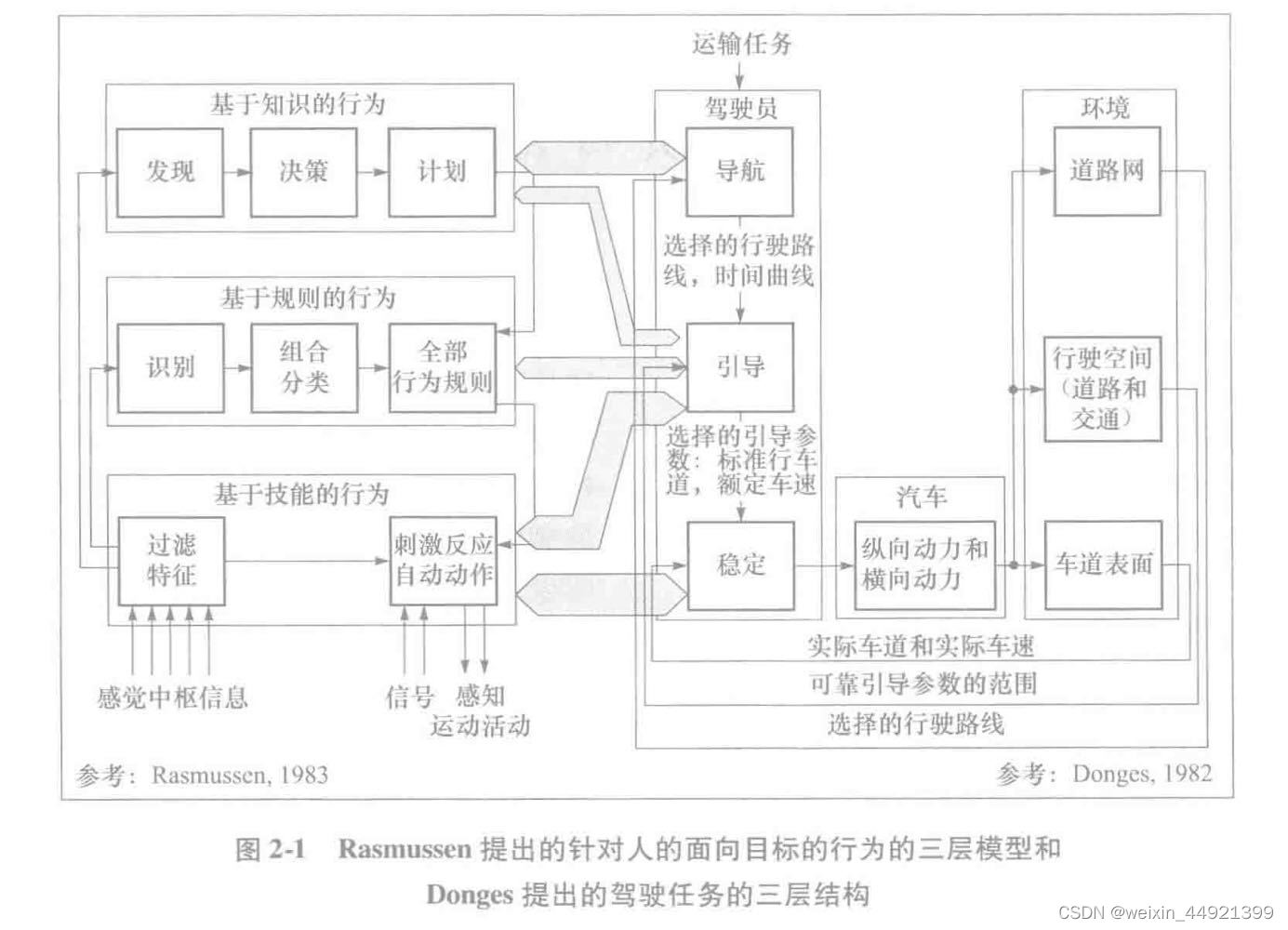
① 1983年Rasmussen提出的针对人的面向目标的行为三层模型【图2-1左】
| 层面X | 特征描述 |
|---|---|
| 基于知识的行为 1 | 意外碰到或者要求进行迄今未进行训练的复杂情况 |
| 基于规则的行为 2 | 所属的情境条件以前经常出现并且相关人员已经有了一份记忆中的行为模式(规则)目录 |
| 基于技能的行为 3 | 反射式的刺激-反应机制,自动下意识的反应 |
② 1982年Dongs提出的驾驶任务的三层结构【图2-1右】
| 层面X | 与行为三层模型的关联 |
|---|---|
| 导航 1 | 基于知识的行为 |
| 引导 2 | 基于知识的行为 + 基于规则的行为 + 基于技能的行为 |
| 稳定 3 | 基于技能的行为 |
从新驾驶员发生事故可以看出,一个人学习该过程所需时间大致要7年或者100,000km的行驶里程,驾驶员才会达到出师的状态。
自动驾驶汽车的行驶里程需要多少?
https://zhuanlan.zhihu.com/p/97559764
只有意外出现危急的情况,才会迫使驾驶员进入基于规则或基于知识的高要求层面上。
在道路交通中应将有意识操作的需求降到最低!
引导层面在确保行驶过程的安全性方面十分重要。人带有前瞻性(预料性的)出色的感知交通空间能力,使其也具有预见性的处理能力,并由此对系统固有的延迟时间做出补偿。
稳定层面,只需要有经验的驾驶员在基于技能的行为层面上实施。
③ 针对驾驶员任务的引导和稳定层次的控制技术模型方法示例
驾驶员模型最早包含一个有关复制人能力的原理以用于预瞄车距的形式前瞻性地感知行驶空间。
驾驶员模型将驾驶任务的引导和稳定这两个层次划分为两个分模型:“前瞻性控制”模型、“补偿性控制”模型,还有一个 “剩余参数”项,包含的是两个分模型未再现的驾驶员反应。
(1)前瞻性控制模型: 输入标准行车道的期望额定曲率,通过一个放大系数和一个平滑的延迟原件生成相应的转向反应。
- 其中的动力放大系数实际是汽车动力放大(汽车转向灵敏度)的倒数,这个参数的意义是在静止情况下行驶车道的标准曲线和实际曲线必须相近。
- 前瞻性转向反应增加的越快,车速越高。
(2)补偿性控制模型: 通过一个相应的放大系数并行追溯三个在驾驶员位置测量到的状态参数 (曲率差、侧滑角误差和与标准车道的横向偏移)
- 侧滑角解释为主调节参数
- 曲率差解释为PID调节器的D部分,放大系数指示了行驶车速显著升高的情况下,相应地对补偿性转向角的预先作用也增加了,驾驶员死区时间也明显缩短了。
- 横向偏移解释为PID调节器的I部分
⭐ PID调节器 :比例-积分-微分控制:PID控制
-
P控制:考虑偏离程度的控制策略。例如:车辆偏离车道距离越小,方向盘转动越小。
c o n t r o l _ 1 = K p ∗ e r r o r control\_1 = Kp*error control_1=Kp∗error -
I控制:考虑车辆和中心线距离变化的快慢,避免“超调”。例如:汽车正在从左偏向中心线靠拢,而且靠拢的速度很快,如果不采取措施,汽车很快会变成右偏。
c o n t r o l _ 2 = c o n t r o l _ 1 + K d ∗ e r r o r _ r a t e control\_2 = control\_1 + Kd*error\_rate control_2=control_1+Kd∗error_rate -
D控制:考虑车辆行驶路线于车道中心线有一个持续的偏差error、例如:汽车接近车道中心线,但是偏离距离很小时,control的值也很小,并不足以驱动车辆继续向中心线靠拢;或者,路上路面不平,导致控制效果变差。
c o n t r o l _ 3 = c o n t r o l _ 2 + K i ∗ ∫ 0 T e r r o r ∗ d t . control\_3 = control\_2 + Ki * \int_0^T error * dt\,. control_3=control_2+Ki∗∫0Terror∗dt.
P I D 完整公式: c o n t r o l _ 3 = K p ∗ e r r o r + K d ∗ e r r o r _ r a t e + K i ∗ ∫ 0 T e r r o r ∗ d t . PID完整公式:control\_3 = Kp * error + Kd * error\_rate + Ki * \int_0^T error * dt\,. PID完整公式:control_3=Kp∗error+Kd∗error_rate+Ki∗∫0Terror∗dt.
来源:https://www.zhihu.com/question/492196386/answer/2243687550
④ 时间标准
确定的1s的前瞻性时间平均值和0.5s的驾驶员死区时间是对时间特性的下述观察的依据。
(1)导航: 一次总时长为几小时的行驶以及在几分钟范围内提前通知的具体地点的路线变化.
(2)引导: 需要进行认知处理的信息系统或者警告系统应尽量有超过2~3s的前瞻性时间。如果无法实现,就只能通过直觉作用的处理建议触觉指示的方式作出一个自发的反应。
引导的任务主要部分是在有利的视野情况下视觉感知道路的几何形状和交通情况,推导出引导参数并有预见性地采取调节干预措施。
(3)稳定: 毫秒范围内的周期时间只能通过技术调节系统显示。
驾驶员提前半秒做出(反应)可能会避免约一半的碰撞事故。
似乎只能通过强化前瞻性反应使该两级时间提前量地驾驶员反应提前,在引导层面也适用。
汽车的驱动与制动 :驱动力来自外力,涉及速度、启动、能跑的快; 制动力属于控制力,如刹车、控速、转向等。
ABS:Antilock Brake System 防抱死制动系统: 在制动过程中防止车轮被制动抱死,提高汽车的方向稳定性和转向操纵能力,缩短制动距离的安全装置。
【抱死:轮胎不转了,汽车像一块砖头一样在路面滑动。】
ASR:Automatic Speech Recognition 自动语音识别: 将人的语音转换为文本的技术。
ESP:Electronic Stability Program 车身电子稳定系统: 提升车辆的操控表现的同时,有效地防止汽车达到其动态极限时失控的系统或程序的通称。
EBD:Electronic Brake force Distribution 电子制动力分配: 由于汽车制动时产生轴荷转移的不同,而自动调节前、后轴的制动力分配比例,提高制动效能,并配合ABS提高制动稳定性。
【轴荷:车轴所承受的载荷】
【制动前轮更有利,在相同路面下,通常地面对前轴产生的制动力容量要比后轴大】
⑤ 量化道路交通中基于技能、规则和只是的反应行为的新模型方法
(1)基于驾驶员经验范围量化
- 基于技能的范围包括一个驾驶员纵向和横向加速度第80百分位数的包络线。
- 基于规则的范围达到第95百分位数。
- 作为偶然发生事件的超出范围的行驶状态应主要划归基于知识的范围。
谨慎型驾驶员范围较小,运动型驾驶员范围较大。
👇不同驾驶员类型的经验范围:
| 驾驶员类型 | 经验范围 |
|---|---|
| 防御型 | 在第80百分位数的包络线之内 |
| 进攻型 | 在第95百分位数的包络线之内 |
| 好斗型 | 超过第95百分位数的包络线 |
通过驾驶员行为集合的包络线和其百分位数将其量化为相应的经验范围并可用于驾驶员辅助系统。
超出了经验范围极限会使驾驶员整年处于危险之中。
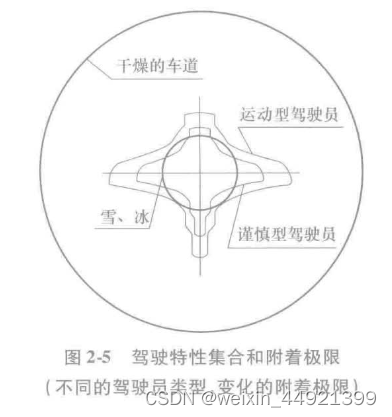
(2)基于路面状态比较
在干燥车道上相应的驾驶特性集合在公共道路交通中明显低于附着极限(摩擦圆)。这可能会导致只有很少的谨慎型驾驶员的驾驶特性集合会超出摩擦圆的极限并在该情况下明显增加发生交通事故的风险。【干燥车道附着极限圆更大,发生事故的概率小非常多】
⑥ 驾驶员辅助系统的推论
(1)两个基本认识:
-
驾驶员辅助系统一方面对附着极限辅助进行安全储备。
-
驾驶员辅助系统另一方面对驾驶员经验范围进行安全储备。
(2)驾驶员辅助系统的设计标准:
-
对于带有信息、警告或者操作建议功能的驾驶员辅助系统来说,在发生意外事件时应至少具有2s的前瞻性时间。
-
必须在0.05~0.1s这个时间范围内做出应答的反应要求只能通过自动干预技术实现,例如ABS、ASR、ESP等。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









