






已在机器人上测试,没问题
本人使用qt编写,需要添加以下语句,Eigen库文件请自行去官网下载
pro文件添加:
#eigen函数库
INCLUDEPATH += $$PWD/eigen-3.4.0
头文件添加:
#include "Eigen/Dense"
typedef Eigen::MatrixXd Matrix;
typedef Eigen::VectorXd Vector;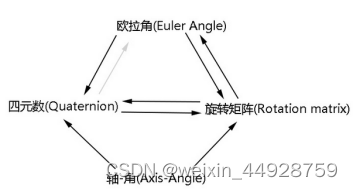
这里特别解释一下轴角和旋转向量的关系,转自四元数,旋转矩阵,轴角,欧拉角的相互转换(原理+Eigen代码实现)_eigen四元数转欧拉角_每天都在努力学习SLAM的小黑的博客-CSDN博客
轴角和旋转向量本质上是一个东西, 轴角用四个元素表达旋转, 其中的三个元素用来描述旋转轴, 另外一个元素描述旋转的角度,如 下所示:
其中单位向量 n=[x,y,z]对应的是旋转轴 θ 对应的是旋转角度。旋转向量与轴角相同, 只是旋转向量用三个元素来描述旋转, 它把 θ 角乘到了旋转轴上, 如下:
有的人们一般习惯把旋转向量也叫做轴角;
实现代码:
void AxisToRpy(double *pose)//旋转向量转欧拉角,传入位姿指针,弧度radian
{
Eigen::Vector3d vec(pose[3], pose[4], pose[5]);
Eigen::AngleAxisd rot_vec(vec.norm(), vec.normalized());//旋转向量转轴角
Eigen::Matrix3d M = rot_vec.toRotationMatrix();//轴角转旋转矩阵
Eigen::Vector3d R_ZYX = M.eulerAngles(2,1,0);//旋转矩阵转欧拉角Z-Y-X,注意顺序
//重新赋值
pose[3] = R_ZYX[2];
pose[4] = R_ZYX[1];
pose[5] = R_ZYX[0];
std::cout << pose[3] << std::endl;
std::cout << pose[4] << std::endl;
std::cout << pose[5] << std::endl;
}
void RpyToAxis(double *pose)//欧拉角转轴角,传入位姿指针,弧度radian
{
//欧拉角转四元数
Eigen::AngleAxisd yawAngle(pose[5], Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd pitchAngle(pose[4], Eigen::Vector3d::UnitY());
Eigen::AngleAxisd rollAngle(pose[3], Eigen::Vector3d::UnitX());
Eigen::Quaternion<double> q = yawAngle * pitchAngle * rollAngle;
//四元数转旋转向量
Eigen::AngleAxisd v=Eigen::AngleAxisd(q);
pose[3] = v.axis()[0]*v.angle();
pose[4] = v.axis()[1]*v.angle();
pose[5] = v.axis()[2]*v.angle();
std::cout << pose[3] << std::endl;
std::cout << pose[4] << std::endl;
std::cout << pose[5] << std::endl;
}
Eigen::MatrixXd getT_fromPose(double pose[6])//位姿转齐次矩阵,欧拉角弧度radian
{
Eigen::MatrixXd Rx(3, 3);
Eigen::MatrixXd Ry(3, 3);
Eigen::MatrixXd Rz(3, 3);
Rx << 1, 0, 0, 0, cos(pose[3]), -sin(pose[3]), 0, sin(pose[3]), cos(pose[3]);
Ry << cos(pose[4]), 0, sin(pose[4]), 0, 1, 0, -sin(pose[4]), 0, cos(pose[4]);
Rz << cos(pose[5]), - sin(pose[5]), 0, sin(pose[5]), cos(pose[5]), 0, 0, 0, 1;
Eigen::MatrixXd R(3, 3);
R = Rz * Ry * Rx;//注意顺序
Eigen::MatrixXd P(3, 1);
P << pose[0], pose[1], pose[2];
Eigen::MatrixXd T(4,4);
T << R, P, Eigen::MatrixXd::Zero(1, 3), Eigen::MatrixXd::Identity(1,1);
return T;
}
std::vector<double> getPose_fromT(Eigen::MatrixXd T)//齐次矩阵转位姿,欧拉角弧度radian
{
double x = T(0, 3);
double y = T(1, 3);
double z = T(2, 3);
double rx = atan2(T(2, 1), T(2, 2));
double ry = asin(-T(2, 0));
double rz = atan2(T(1, 0), T(0, 0));
std::vector<double> pose;
pose.push_back(x);
pose.push_back(y);
pose.push_back(z);
pose.push_back(rx);
pose.push_back(ry);
pose.push_back(rz);
return pose;
}
double* RpyToQuaternion(double *pose)//欧拉角位姿转四元数位姿,传入位姿指针,返回四元数位姿
{
double quaternion[7] = {0};
Eigen::AngleAxisd yawAngle(pose[5], Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd pitchAngle(pose[4], Eigen::Vector3d::UnitY());
Eigen::AngleAxisd rollAngle(pose[3], Eigen::Vector3d::UnitX());
Eigen::Quaternion<double> q = yawAngle * pitchAngle * rollAngle;
quaternion[0] = pose[0];
quaternion[1] = pose[1];
quaternion[2] = pose[2];
quaternion[3] = q.x();
quaternion[4] = q.y();
quaternion[5] = q.z();
quaternion[6] = q.w();
std::cout << "," << q.x() << "," << q.y() << "," << q.z() << q.w() << std::endl;
return quaternion;
}
double* QuaternionToRpy(double *quaternion)//四元数位姿转欧拉角位姿,传入位姿指针,返回四元数位姿
{
double pose[6] = {0};
Eigen::Quaternion<double> q;
q.x() = quaternion[3];
q.y() = quaternion[4];
q.z() = quaternion[5];
q.w() = quaternion[6];
Eigen::Vector3d eulerAngle=q.matrix().eulerAngles(2,1,0);
//重新赋值
pose[0] = quaternion[0];
pose[1] = quaternion[1];
pose[2] = quaternion[2];
pose[3] = eulerAngle[2];
pose[4] = eulerAngle[1];
pose[5] = eulerAngle[0];
std::cout << pose[3] << std::endl;
std::cout << pose[4] << std::endl;
std::cout << pose[5] << std::endl;
return pose;
}
Eigen::Matrix3d eulerAnglesToRotationMatrix(Eigen::Vector3d& theta)
{
Eigen::Matrix3d R_x;
R_x <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0]);
Eigen::Matrix3d R_y;
R_y <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1]);
Eigen::Matrix3d R_z;
R_z <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1;
Eigen::Matrix3d R = R_z * R_y * R_x;
return R;
}
bool isRotationMatrix(Eigen::Matrix3d R)
{
double err = 1e-6;
Eigen::Matrix3d shouldIdentity;
shouldIdentity = R * R.transpose();
Eigen::Matrix3d I = Eigen::Matrix3d::Identity();
return (shouldIdentity - I).norm() < err;
}
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d& R)
{
assert(isRotationMatrix(R));
double sy = sqrt(R(0, 0) * R(0, 0) + R(1, 0) * R(1, 0));
bool singular = sy < 1e-6;
double x, y, z;
if (!singular) {
x = atan2(R(2, 1), R(2, 2));
y = atan2(-R(2, 0), sy);
z = atan2(R(1, 0), R(0, 0));
}
else
{
x = atan2(-R(1, 2), R(1, 1));
y = atan2(-R(2, 0), sy);
z = 0;
}
return { x,y,z };
}
void Widget::on_pushButton_2_clicked()
{
// 初始化欧拉角{ -38.0669[°], -17.7130[°], -122.7096[°], "ZYX"}
// Eigen::Vector3d euler_angle(deg_to_rad(-38.0669), deg_to_rad(-17.7130), deg_to_rad(-122.7096));
Eigen::Vector3d euler_angle(deg_to_rad(-123.977), deg_to_rad(-22.915), deg_to_rad(35.4893));
// 使用eigen库,欧拉角转旋转矩阵
Eigen::Matrix3d rotation_matrix1, rotation_matrix2;
rotation_matrix1 =
Eigen::AngleAxisd(euler_angle[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle[0], Eigen::Vector3d::UnitX());
std::cout << "\nrotation matrix1 =\n" << rotation_matrix1 << std::endl << std::endl;
// 使用自定义函数,欧拉角转旋转矩阵
rotation_matrix2 = eulerAnglesToRotationMatrix(euler_angle);
std::cout << "rotation matrix2 = \n" << rotation_matrix2 << std::endl << std::endl;
// 使用eigen将旋转矩阵转换为欧拉角,欧拉角的实际范围是:roll:[−π,π];pitch:
//[−π/2,π/2];yaw:[−π,π],
//Eigen库中欧拉角范围是:0:[0:π];1:[−π:π];2:[−π:π],所以eigen得到的结果不一样,
//Eigen中确保第一个角度的转换,不建议使用eigen
Eigen::Vector3d eulerAngle1 = rotation_matrix1.eulerAngles(2, 1, 0); //zyx顺序
std::cout << "roll_2 pitch_2 yaw_2 = " << rad_to_deg(eulerAngle1[0]) << " " << rad_to_deg(eulerAngle1[1])
<< " " << rad_to_deg(eulerAngle1[2]) << std::endl << std::endl;
// 使用自定义函数将旋转矩阵转换为欧拉角
Eigen::Vector3d eulerAngle2 = rotationMatrixToEulerAngles(rotation_matrix1);
std::cout << "roll_2 pitch_2 yaw_2 = " << rad_to_deg(eulerAngle2[0]) << " " << rad_to_deg(eulerAngle2[1])
<< " " << rad_to_deg(eulerAngle2[2]) << std::endl << std::endl;
}调用实例:
背景: current_tcp_pose是机器人某个固定姿态工具坐标的位姿,tcp_pose是机器人当前位置的位姿,目的是求tcp_pose相对于current_tcp_pose的位姿
double tcp_pose[6] = {0};
double current_tcp_pose[6] = {0.640174, -0.320434, 0.355579, -0.524125, 0.533343, 1.391761};//轴角位姿
Eigen::MatrixXd T;
Eigen::MatrixXd T1;
Eigen::MatrixXd T2;
std::vector<double> pose;
AxisToRpy(current_tcp_pose);//转换成欧拉角位姿
T = getT_fromPose(current_tcp_pose);//转换成矩阵
getTcpPos(tcp_pose);//获取当前位姿(轴角)
AxisToRpy(tcp_pose);//转换成欧拉角位姿
T1 = getT_fromPose(tcp_pose);//转换成矩阵
T2 = T.inverse() * T1;//矩阵乘法
pose = getPose_fromT(T2);矩阵转换成位姿(欧拉角)














 5606
5606











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









