






三边定位算法
三边定位算法简介
三个位置已知点(锚节点,圆心)以及其到另外一个未知点(待定位点)的距离即半径(不准确),求位置节点坐标的过程;
实际上(例如用rssi算距离)三个点到未知点的距离半径很可能不交与一点;怎么办呢?
参考文章 https://www.jianshu.com/p/94475aacc95a
这里引用下方法的逻辑:
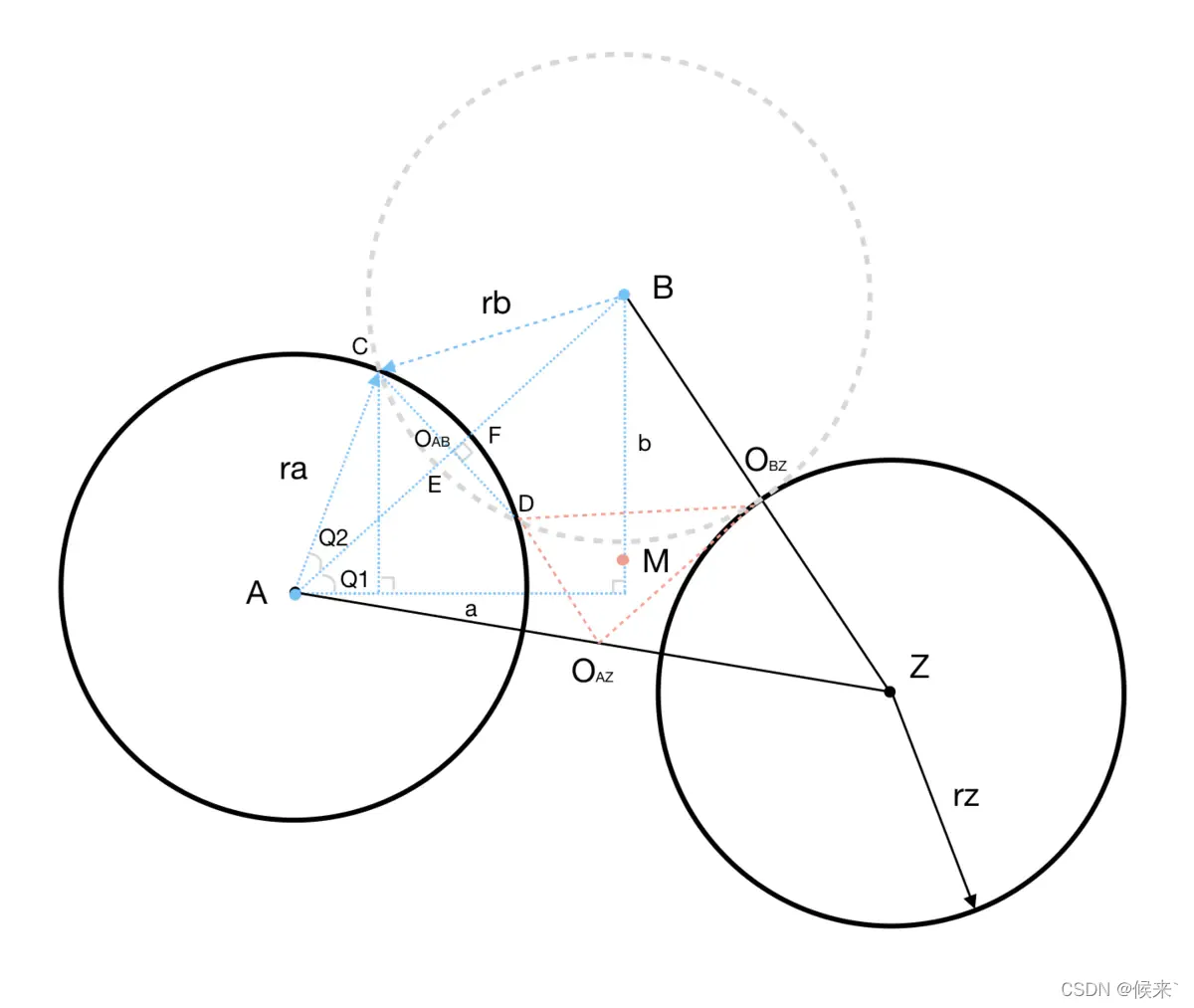
两圆不相交时,按比例取中点(和)。当两圆相交时,就是拆分成几个三角形,通过一系列三级函数计算出未知的两个交点。最后将三点连成三角形,此三角形的重心(即点M)就是最终定位点,步骤如下:
通过勾股定律用a、b长度计算出线段AB长度(即点A到点B距离),使用 ra + rb 与AB对比即可得知两圆的对应情况,一共有三种情况:两圆相离ra + rb < AB、两圆相切ra + rb == AB、两圆相交ra + rb > AB。
两圆相离:按照两圆半径的比例在线段AZ上求点,即;因为“两圆相切ra + rb == AB”在实际程序中出现的几率太小,所以直接使用“两圆相离”相同的求法。
两圆相交:求出相交点C的坐标 {Cx, Cy},可通过得出Q1,通过得出Q2,最后计算出点C的坐标:
同理可求出点D的坐标。得到C、D两交点后取距离圆心Z点近的交点作为最后三个参考点中的一点。
将最后求得的三个参考点连接成一个三角形,该三角形的重心即为最后的定位点M:
作者:Hank_Zhong
链接:https://www.jianshu.com/p/94475aacc95a
来源:简书
发现的问题
但是这篇文章对应的如下代码好像不太对,,
具体就是Eo=0.5*EF那里(第11行),这应该是一种工程近似,在两圆相交的很少的情况之下可以这样近似,可实际情况复杂多变,两个圆相交很多的情况很常见;
总要判断相对位置正负号很麻烦;
-(CGPoint)sidePointCalculationWith:(double)x1 :(double)y1 :(double)r1
:(double)x2 :(double)y2 :(double)r2
:(double)x3 :(double)y3{
//勾股定理 sqrt(X)是X开根号 pow(X,n)是X的n次方
//取beacon1圆心A 与 beacon2圆心B的距离
double AB = sqrt(pow(x1 - x2, 2) + pow(y1 - y2, 2));
double rAB = (r1 + r2);
if (rAB > AB && (r1 < AB && r2 < AB)) {
//两圆有相交点,两圆相交点为C、D。两圆与AB的相交点为E、F。o是EF的中点。
double EF = rAB - AB;
double Eo = EF * 0.5;
double AE = r1 - EF;
double Ao = AE + Eo;
double AQ1 = acos((x2 - x1) / AB);
double AQ2 = acos(Ao / r1);
double BF = r2 - EF;
double Bo = BF + Eo;
// double BQ1 = acos(fabs(x1 - x2) / AB);
double BQ2 = acos(Bo / r2);
//原点{0,0}在左上角的情况下
double Cx = x1 + (r1 * cos(AQ1 + AQ2));
double Cy = 0.0;
double Dx = x2 - (r2 * cos(AQ1 + BQ2));
double Dy = 0.0;
if (x1 < x2) {
Dx = x2 - (r2 * cos(AQ1 + BQ2));
if (y1 < y2) {
Cy = y1 + (r1 * sin(AQ1 + AQ2));
Dy = y2 - (r2 * sin(AQ1 + BQ2));
}else{
Cy = y1 - (r1 * sin(AQ1 + AQ2));
Dy = y2 + (r2 * sin(AQ1 + BQ2));
}
}else{
Cy = y1 + (r1 * sin(AQ1 + AQ2));
if (y1 < y2) {
Dy = y2 - (r2 * sin(AQ1 + BQ2));
}else{
Dy = y2 + (r2 * sin(AQ1 + BQ2));
}
}
double Cc = sqrt(pow(Cx - x3, 2) + pow(Cy - y3, 2));
double Dc = sqrt(pow(Dx - x3, 2) + pow(Dy - y3, 2));
return Cc < Dc ? CGPointMake(Cx, Cy) : CGPointMake(Dx, Dy);
}else{
//两圆无相交点
return [self midpointCalculationWith:x1 :y1 :r1
:x2 :y2 :r2];
}
}
重新按照这个逻辑写
思路
仍然是从三个点之中取出两个点,求这两个点之间的参考点,两两之间求,求三次得到三个参考点再取重心;原代码中的两圆相离或相切部分没有问题,不再赘述,主要关注两圆相交求参考点的问题;
其中有两个子问题:
1:求两圆的交点
参考这篇:求解两圆相交的交点坐标
利用其中的方法二,可以避免分母为零的情况;由两圆的交点可以得到两圆之间交点所连的线段的公式(两点式);
2:求线段上一点到线段外一点距离最小
这个可以把线段转换为一元参数式求解,得到的二次方程可以通过一元二次公式求解析解的;
代码
这个函数需要被调用三次的,每次求的是两个已知点之间的参考点;
//C语言函数 输入三个已知点的坐标以及两个圆的半径
struct ref_p Find_Position(double x1,double x2,double x3,double y1,double y2,double y3,double r1,double r2)
{//sqrt(X)是X开根号 pow(X,n)是X的n次方
struct ref_p tmp;
double AB = sqrt(pow(x1 - x2, 2) + pow(y1 - y2, 2));//两个圆心之间的距离
// r1=r1>AB?AB:r1;
// r2=r2>AB?AB:r2;
double rAB = (r1 + r2);
// if (rAB > AB && (r1 < AB && r2 < AB)) // 如果一个圆半径大于两个圆心的距离则认为相离,这使得更大半径圆的信任程度降低
if (rAB > AB && (r1 < (AB+r2) && r2 < (AB+r1))) //如果两圆相交
{
double a=(pow(r1,2)-pow(r2,2)+pow(AB,2))/(2*AB); //求两个圆的交点坐标
double x0=x1+(x2-x1)*a/AB;
double y0=y1+(y2-y1)*a/AB;
double hdr=sqrt(pow(r1,2)-pow(a,2))/AB; //表示h和d的比值rate
double Cx=x0-hdr*(y2-y1);// 两圆交点坐标
double Cy=y0+hdr*(x2-x1);
double Dx=x0+hdr*(y2-y1);
double Dy=y0-hdr*(x2-x1);
double t=-((Dx-Cx)*(Cx-x3)+(Dy-Cy)*(Cy-y3))/(pow(Dx-Cx,2)+pow(Dy-Cy,2));//根据一元二次方程解析解的求解公式列出
t=t<=0?0:(t>=1?1:t); //为了保证所求点在线段上,t=0或1时为线段的两个端点,t超过了0,1之间的话代表在线段之外,就让其变成端点
printf("t=%f\n",t);
tmp.ref_x = Cx+t*(Dx-Cx); //通过参数方程的t求参考点
tmp.ref_y = Cy+t*(Dy-Cy);
return tmp;
}
else
{
//两圆相切或相离
double a = y1 - y2;//竖边
double b = x1 - x2;//横边
double rr = r1 + r2;
double s = r1 / rr;
double x = fabs(x1 - (b * s)) ;
double y = fabs(y1 - (a * s)) ;
tmp.ref_x = x;
tmp.ref_y = y;
return tmp;
}
}
这样不用担心分母为零的情况,以及判断两圆的相对位置决定正负号什么的,还可以求出比较准确的解析解,代码短一些;
ps:第一次写,写的不好也没啥营养,,,欢迎大家批评指正~














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









