






分段变参数控制算法通过检测系统误差所处的区域,采取不同的控制策略
方法一
将误差从小到大分为一二三,三个区,采取不同的控制策略。
1、
当系统误差处于III区时,采用Bang_Bang 控制(输出正最大值或负最大值的控制量),使系统由一个区域经历最短的时间运动到另一个区域。这种控制方法动态响应快,能将误差尽快的引入到小误差区间,不足之处则是控制量过大,必须在进入较小的误差区间后切换为其他控制算法。
2、
当系统误差处于II区时,采用了与误差值相关的开方算法,即控制量等于误差值乘以开方系数再开二次方,开方系数是一个根据误差分区情况而定的参数,使用开方算法能够使控制量快速的从 Bang_Bang 控制的最大控制量,收敛为 PID控制的小控制量,并且保证过渡的平滑。
3、
系统误差处于 I 区时,采用PID控制。同时,在误差较大时,为了尽快的减速并防止积分饱和现象(所谓积分饱和现象是指若系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断累加而加大,从而导致u(k)达到极限位置。此后若控制器输出继续增大,u(k)也不会再增大,即系统输出超出正常运行范围而进入了饱和区。一旦出现反向偏差,u(k)逐渐从饱和区退出。进入饱和区愈深则退饱和时间愈长。此段时间内,执行机构仍停留在极限位置而不能随着偏差反向立即做出相应的改变,这时系统就像失去控制一样,造成控制性能恶化。这种现象称为积分饱和现象或积分失控现象),采用了较小的比例系数加上速度前馈的控制。误差较小时,为了消除静差,提高系统的控制精度,加入了积分系数,同时,在误差不同范围内,还采用了变系数的方式,以达到更好的控制效果。
加入积分后,积分量与之前的误差之和成比例,则可以替代部分误差比例控制的作用,使误差减小。但积分信号是滞后的,对系统动态响应不利,且消除误差必须在误差变负即超调后,所以在使用积分环节来得到较高的精度的同时要解决随之而来的系统超调。
微分环节正好与积分相反,是超前的,反映的是误差的变化趋势,当误差减小时,微分信号就已经是负值,可以提前减速,减少超调量。
总结:
1.误差绝对值较大时采用 Bang_Bang 控制,控制器输出正向或负向最大值,输出值u=umax。
2.系统进入减速段,采用开方控制,控制器输出值u =√ e×开方系数。
3.系统进入协调阶段,反馈位置已经接近目标位置,此时采用 PID调节,u=e×kp+ki×积分量,此时Kp和Ki较小,使控制量保持较小的输出,实施较弱的控制作用。
4.最后阶段误差值已经很小,所以适量加大kp和ki,系统主要是进行定位、消除稳态误差,u = e×kp+ ki×积分量。
方法二
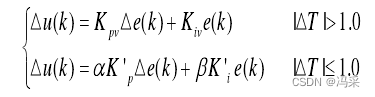
Kpv 为变增益比例调节系数;Kiv为变增益积分调节系数;'Kp为|ΔT|≤1.0时刻的比例调节系数;'Ki为|ΔT|≤1.0时刻的积分调节系数;α为比例调整系数;β为积分调整系数。
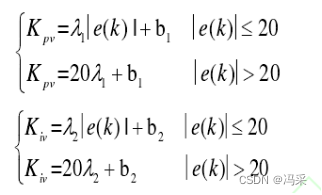
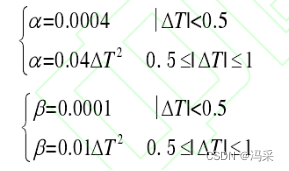
λ1、λ2、b1、b2均为常数,通过不同e(k)时的试验数据拟合确定;α、β为经验法确定。
对Kpv、Kiv设定上限值,防止由于比例调节系数与积分调节系数过大;对α、β设定下限值,避免稳态工况状态下过小。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









