







1. 论文&代码源
《Gait Recognition via Effective Global-Local Feature Representation and Local Temporal Aggregation》
论文地址:https://ieeexplore.ieee.org/document/9710710
代码下载地址: 作者未提供
2. 论文亮点
1. 建立全局和局部特征提取器(GLFE):
在特征提取过程中建立全局和局部特征提取器(Global and Local Feature Extractor, GLFE);
2. 集成多个全局和局部卷积层(GLConv):
GLFE中集成了多个全局和局部卷积层,全局卷积用于提取整个步态视觉外观的特征,局部卷积层用于提取步态细节(以principle方式提取特征);
3. 构建局部时间聚合模块(LTA):
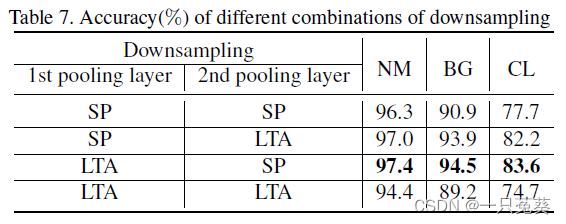
为避免2D CNN空间池化降低分辨率导致信息丢失,为了更充分地利用空间信息,构建局部时间聚合模块(Local Temporal Aggregation, LTA),通过代替传统的空间池化层,聚合局部片段的时间信息,利用时间分辨率以获得更高的空间分辨率。
3. 模型结构
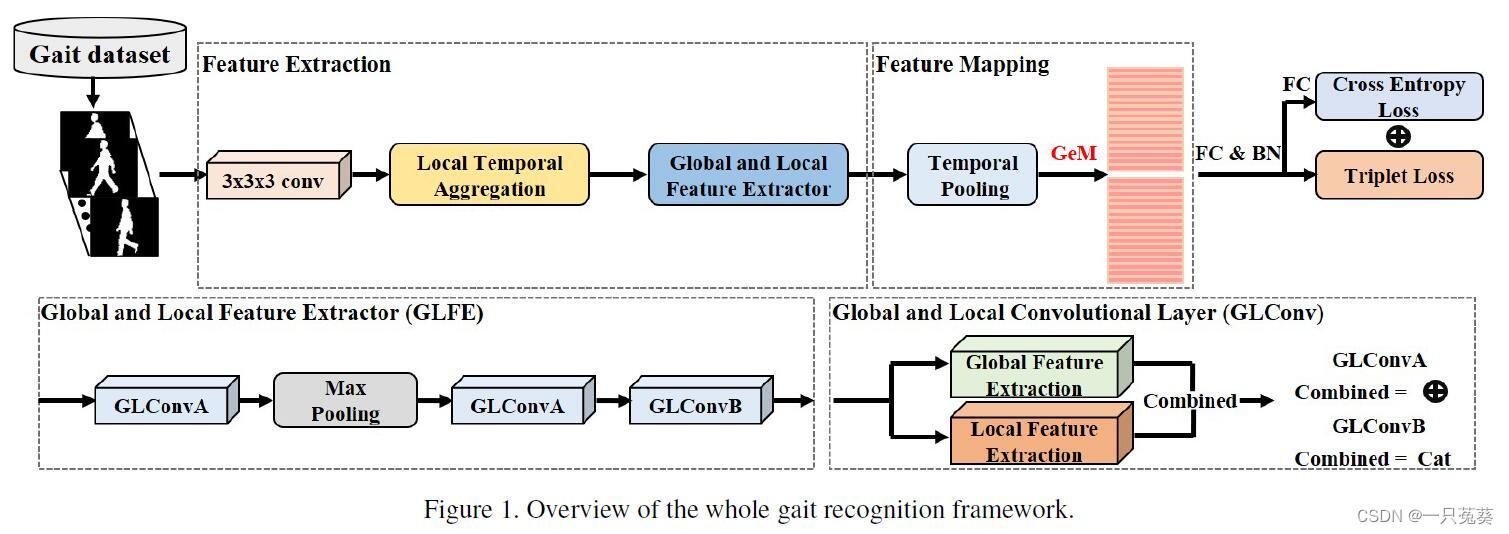
模型的结构如下图所示,目的是为了步态识别提取更全面的特征表示,大致分为3个关键部分。
首先使用卷积从原始输入序列中提取浅层特征,使用局部时间聚合操作(LTA)来聚合时间信息,以保留更多的空间信息;之后使用全局和局部特征提取器(GLFE),以提取全局和局部信息的组合特征;最后使用时间池化和GeM池化层来实现特征映射,并使用三元组损失和交叉熵损失来训练模型。
3.1 局部时间聚合(Local Temporal Aggregation, LTA)
LTA可以整合局部片段的时间信息,同时保留更多的空间信息。
假设
X
i
n
∈
R
C
1
×
T
1
×
H
1
×
W
1
X_{in} \in \Bbb R^{C_1 \times T_1 \times H_1 \times W_1}
Xin∈RC1×T1×H1×W1是LTA的输入,其中,
C
1
C_1
C1是通道数;
T
1
T_1
T1是步态序列长度;
(
H
1
,
W
1
)
(H_1, W_1)
(H1,W1)是每帧(步态)图像的大小,此模块的计算式为:
X
L
T
A
=
f
a
×
a
×
a
b
×
1
×
1
(
X
i
n
)
X_{LTA} = f_{a \times a \times a}^{b \times 1 \times 1}(X_{in})
XLTA=fa×a×ab×1×1(Xin)
f
a
×
a
×
a
b
×
1
×
1
(
⋅
)
f_{a \times a \times a}^{b \times 1 \times 1}( \cdot )
fa×a×ab×1×1(⋅)表示的是核大小为
a
a
a,时间步长为
b
b
b的3D CNN。
输出为 X L T A ∈ R C 2 × T 2 × H 1 × W 1 X_{LTA} \in \Bbb R^{C_2 \times T_2 \times H_1 \times W_1} XLTA∈RC2×T2×H1×W1
3.2 全局和局部特征提取(Global and Local Feature Extractor, GLFE)
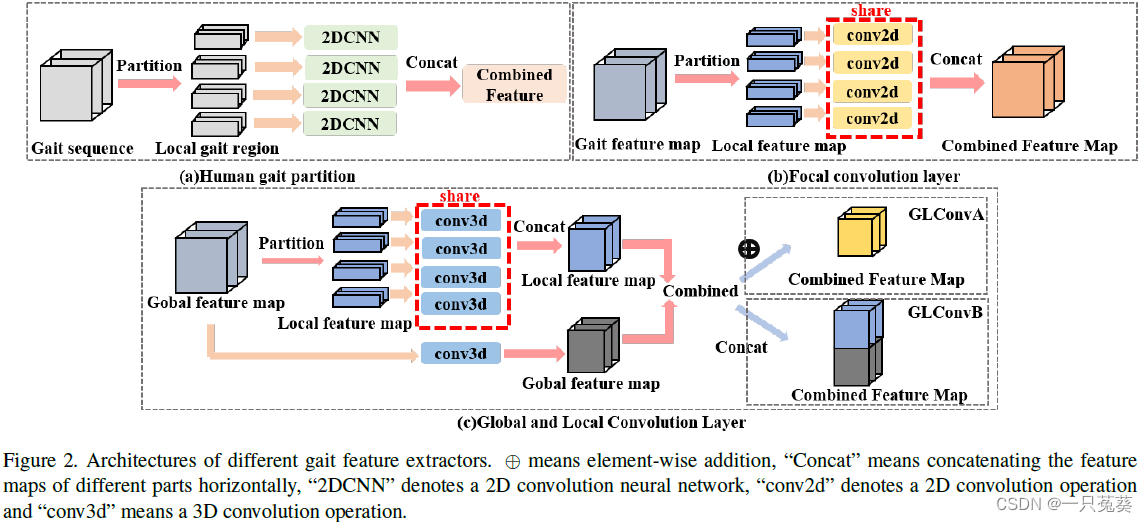
尽管现有方法能够提取出局部特征,提供比步态特征更加详细的信息,但局部特征并没有注意到局部区域之间的关系,因此,作者提出了GLFE模块来同时利用全局和局部信息。
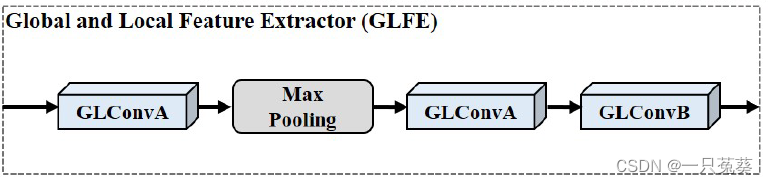
GLFE模块由GLConv层实现,它包含全局和局部特征提取器。根据组合的形式又可以分为GLConvA和GLConvB两种类型。
假设
X
g
l
o
b
a
l
∈
R
c
1
×
t
×
h
×
w
X_{global} \in \Bbb R^{c_1 \times t \times h \times w}
Xglobal∈Rc1×t×h×w是LTA的输入,其中,
c
1
c_1
c1是通道数;
t
t
t是特征序列长度;
(
h
,
w
)
(h, w)
(h,w)是每帧(特征)图像的大小。
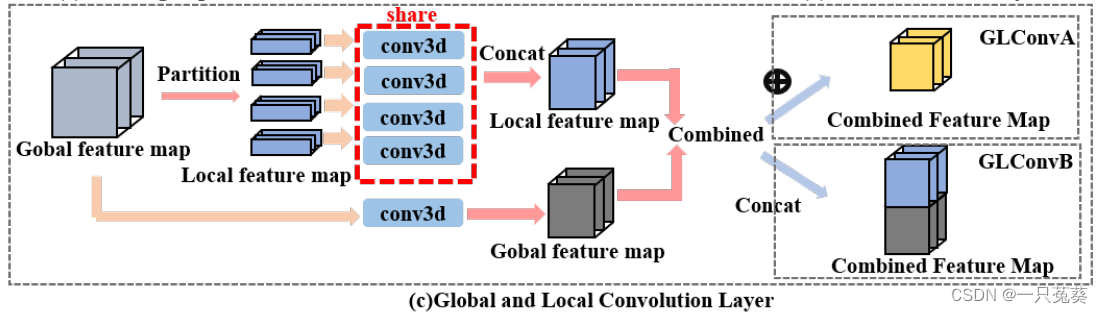
根据输入的下标 g l o b a l global global不难理解输入的是一张完整的特征图像,也就是全局图,现在需要将它分割为局部特征图,我们定义 X l o c a l = { X l o c a l i ∣ i = 1 , 2 , . . . , n } X_{local} = \{X_{local}^i | i=1,2, ..., n\} Xlocal={Xlocali∣i=1,2,...,n}, n n n是在图像高度上划分的区域数,划分得到 X l o c a l l i ∈ R c 1 × t × h n × w X_{locall}^i \in \Bbb R^{c_1 \times t \times \frac hn \times w} Xlocalli∈Rc1×t×nh×w。
使用3D CNN分别提取全局和局部特征。
注意:提取局部步态的卷积网络权值共享
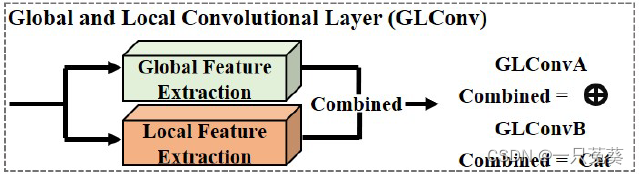
对全局和局部特征有两种结合方式:
{
逐元素加法 (GLConvA)
串联法 (GLConvB)
\begin{cases} \text{逐元素加法 (GLConvA)}\\ \text{串联法 (GLConvB)}\\ \end{cases}
{逐元素加法 (GLConvA)串联法 (GLConvB)
相应的表达式如下:
Y
G
L
C
o
n
v
A
=
Y
g
l
o
b
a
l
+
Y
l
o
c
a
l
∈
R
c
2
×
t
×
h
×
w
Y_{GLConvA} = Y_{global}+Y_{local} \in \Bbb R^{c_2 \times t \times h \times w}
YGLConvA=Yglobal+Ylocal∈Rc2×t×h×w
Y
G
L
C
o
n
v
A
=
c
a
t
{
Y
g
l
o
b
a
l
Y
l
o
c
a
l
}
∈
R
c
2
×
t
×
2
h
×
w
Y_{GLConvA} = cat \begin{Bmatrix} Y_{global}\\ Y_{local} \end{Bmatrix} \in \Bbb R^{c_2 \times t \times 2h \times w}
YGLConvA=cat{YglobalYlocal}∈Rc2×t×2h×w
其中,
Y
g
l
o
b
a
l
Y_{global}
Yglobal和
Y
l
o
c
a
l
Y_{local}
Ylocal的计算式分别为:
Y
g
l
o
b
a
l
=
f
3
×
3
×
3
(
X
g
l
o
b
a
l
)
∈
R
c
2
×
t
×
h
×
w
Y_{global} = f_{3 \times 3 \times 3}(X_{global})\in \Bbb R^{c_2 \times t \times h \times w}
Yglobal=f3×3×3(Xglobal)∈Rc2×t×h×w
Y
l
o
c
a
l
=
c
a
t
{
f
3
×
3
×
3
′
(
Y
l
o
c
a
l
1
)
f
3
×
3
×
3
′
(
Y
l
o
c
a
l
2
)
⋮
f
3
×
3
×
3
′
(
Y
l
o
c
a
l
n
)
}
∈
R
c
2
×
t
×
h
×
w
Y_{local} = cat \begin{Bmatrix} f'_{3 \times 3 \times 3}(Y_{local}^1)\\ f'_{3 \times 3 \times 3}(Y_{local}^2)\\ \vdots \\ f'_{3 \times 3 \times 3}(Y_{local}^n)\\ \end{Bmatrix} \in \Bbb R^{c_2 \times t \times h \times w}
Ylocal=cat⎩⎪⎪⎪⎨⎪⎪⎪⎧f3×3×3′(Ylocal1)f3×3×3′(Ylocal2)⋮f3×3×3′(Ylocaln)⎭⎪⎪⎪⎬⎪⎪⎪⎫∈Rc2×t×h×w
这里的
Y
l
o
c
a
l
i
Y_{local}^i
Ylocali和上文的
X
l
o
c
a
l
i
X_{local}^i
Xlocali应该是一回事,只不过作者忘记改过来了?
GLFE中前几个用GLConvA,最后一个用GLConvB
3.3 特征图(Feature Mapping)
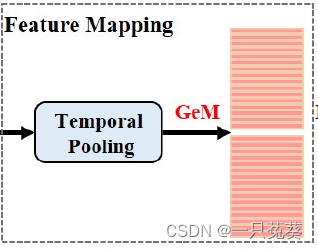
3.3.1 时间池化(Temporal Pooling, TP)
由于输入的步态序列长度可能不同,作者引入时间池化来聚合整个序列的时间信息,假设GLFE模块的输出为 X G L F E ∈ R C 3 × T 2 × H 2 × W 2 X_{GLFE} \in \Bbb R^{C_3 \times T_2 \times H_2 \times W_2} XGLFE∈RC3×T2×H2×W2,其中 C 3 C_3 C3通道数; T 2 T_2 T2是特征图的长度; ( H 2 , W 2 ) (H_2, W_2) (H2,W2)是特征图的大小。
因为在GLFE中经历了空间维度上的池化,所以特征图的大小由 ( h , w ) (h, w) (h,w)变为 ( H 2 , W 2 ) (H_2, W_2) (H2,W2)。
时间池化
T
P
(
⋅
)
TP(\cdot)
TP(⋅)可以用下式表示:
Y
T
P
=
F
M
a
x
T
2
×
1
×
1
(
X
G
L
F
E
)
Y_{TP} = F_{Max}^{T_2 \times 1 \times 1}(X_{GLFE})
YTP=FMaxT2×1×1(XGLFE)其中
F
M
a
x
T
2
×
1
×
1
(
⋅
)
F_{Max}^{T_2 \times 1 \times 1}(\cdot)
FMaxT2×1×1(⋅)为最大池化层;输出
Y
T
P
∈
R
C
3
×
1
×
H
2
×
W
2
Y_{TP} \in \Bbb R^{C_3 \times 1 \times H_2 \times W_2}
YTP∈RC3×1×H2×W2。
3.3.2 广义平均池化(Generalized-Mean pooling, GeM)
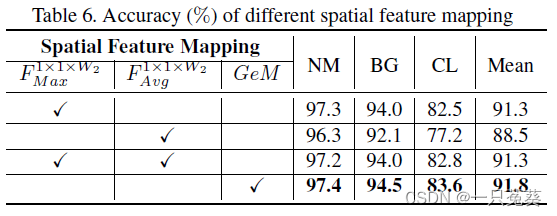
为了提高特征表示能力,在时间池化后,步态特征图被分割成条状,并使用最大和平均两个统计函数来汇总每个条状的信息,空间特征映射可以表示为:
Y
M
A
=
α
F
M
a
x
1
×
1
×
W
2
(
Y
T
P
)
+
β
F
A
v
g
1
×
1
×
W
2
(
Y
T
P
)
Y_{MA} = \alpha F_{Max}^{1 \times 1 \times W_2}(Y_{TP}) + \beta F_{Avg}^{1 \times 1 \times W_2}(Y_{TP})
YMA=αFMax1×1×W2(YTP)+βFAvg1×1×W2(YTP)输出
Y
M
A
∈
R
C
3
×
1
×
H
2
×
1
Y_{MA} \in \Bbb R^{C_3 \times 1 \times H_2 \times 1}
YMA∈RC3×1×H2×1,权重系数
α
\alpha
α和
β
\beta
β是预先设定好的,所以引出广义平均池化。
广义平均池化能够自适应地整合空间信息,其表达式为:
Y
G
e
M
=
(
F
A
v
g
1
×
1
×
W
2
(
(
Y
T
P
)
p
)
)
1
p
Y_{GeM} = (F_{Avg}^{1 \times 1 \times W_2}((Y_{TP})^p))^{\frac 1p}
YGeM=(FAvg1×1×W2((YTP)p))p1输出
Y
G
e
M
∈
R
C
3
×
1
×
H
2
×
1
Y_{GeM} \in \Bbb R^{C_3 \times 1 \times H_2 \times 1}
YGeM∈RC3×1×H2×1,参数
p
p
p是一个可以通过网络训练得到的学习参数,有一下两种情况:
{
if
p
=
1
,
Y
G
e
M
=
Avg
1
×
1
×
W
2
(
Y
T
P
)
if
p
→
∞
,
Y
G
e
M
=
Max
1
×
1
×
W
2
(
Y
T
P
)
\begin{cases} \text {if} \space p = 1 , \space Y_{GeM} = \text {Avg}^{1 \times 1 \times W_2}(Y_{TP})\\ \text {if} \space p \to \infty , \space Y_{GeM} = \text {Max}^{1 \times 1 \times W_2}(Y_{TP})\\ \end{cases}
{if p=1, YGeM=Avg1×1×W2(YTP)if p→∞, YGeM=Max1×1×W2(YTP)
3.3.3 全连接(Fully Connection, FC)
引入多个独立全连接来聚合 Y G e M Y_{GeM} YGeM的通道信息,表达式为: Y o u t = F s f c ( Y G e M ) ∈ R C 4 × 1 × H 2 × 1 Y_{out} = F_{sfc}(Y_{GeM}) \in \Bbb R^{C_4 \times 1 \times H_2 \times 1} Yout=Fsfc(YGeM)∈RC4×1×H2×1
3.4 损失函数(Loss Function)
采用三元组损失和交叉熵损失:
L
c
o
m
b
i
n
e
d
=
L
t
r
i
+
L
c
e
s
L_{combined} = L_{tri} + L_{ces}
Lcombined=Ltri+Lces
L
t
r
i
=
[
D
(
F
(
i
)
,
F
(
k
)
)
−
D
(
F
(
i
)
,
F
(
j
)
)
+
m
]
+
L_{tri} = [D(F(i),F(k))-D(F(i),F(j))+m]_+
Ltri=[D(F(i),F(k))−D(F(i),F(j))+m]+
4. 模型的训练和测试
训练阶段:
与Giatset、GaitPart模型的参数设置类似,此处不一一赘述。
考虑到内存的限制,作者将输入序列的长度设定为一个固定值。
测试阶段:
为了计算Rank-1准确率,测试数据集被分为gallery set和probe set两组,gallery set被视为要检索的标准视图,而probe set的特征向量则用于匹配gallery中的特征向量。gallery与probe之间的度量策略可以使用欧氏距离、余弦距离等,本文使用的是欧氏距离。
5.实验结果
5.1 参数设置
实验使用的是CASIA-B和OU-MVLP两个数据集,具体的参数设置见下表:

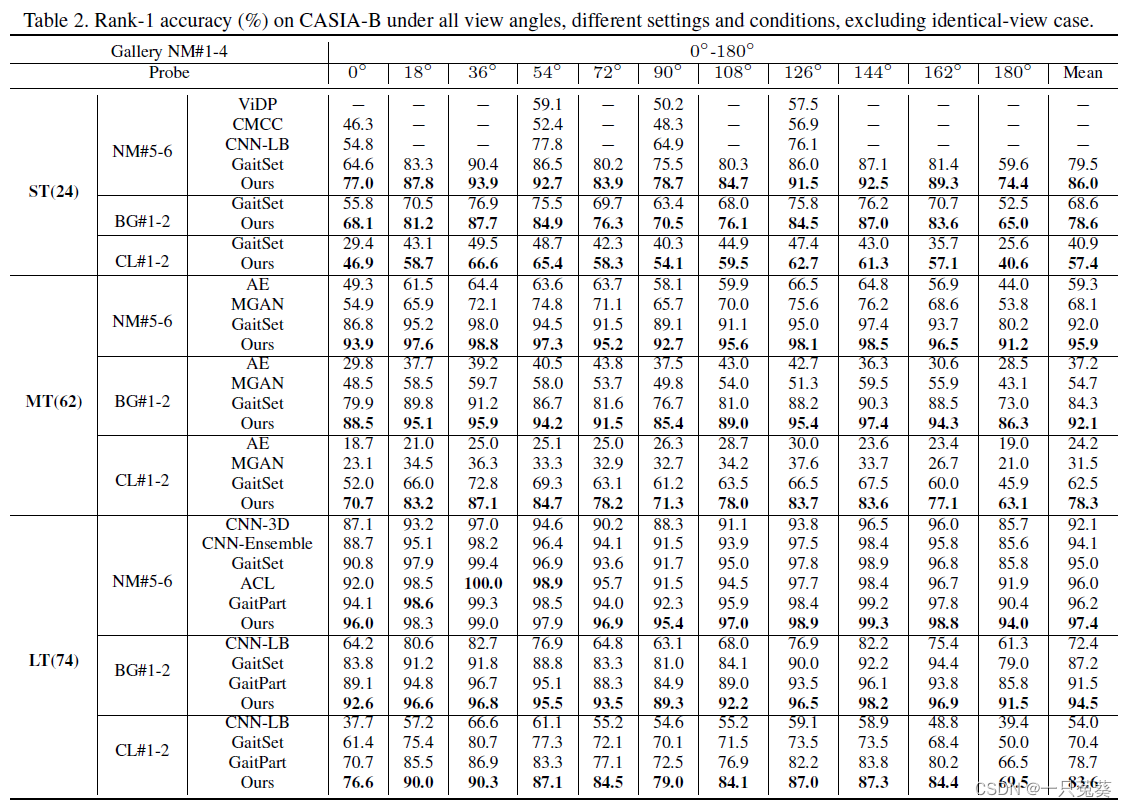
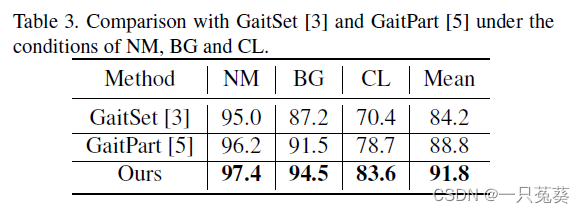
5.2 模型准确率
5.2.1 CASIA-B
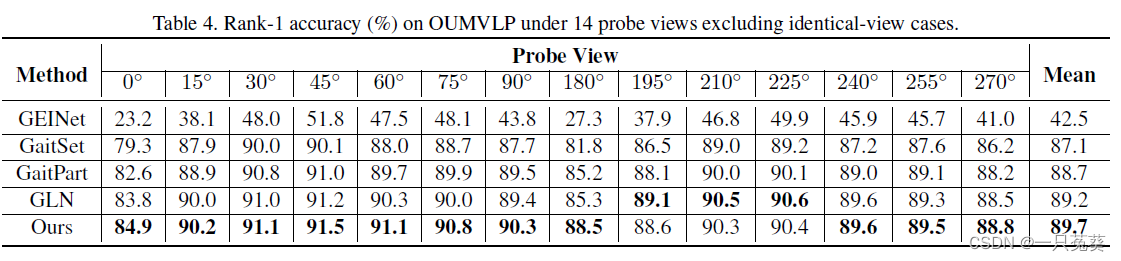
5.2.2 OU-MVLP
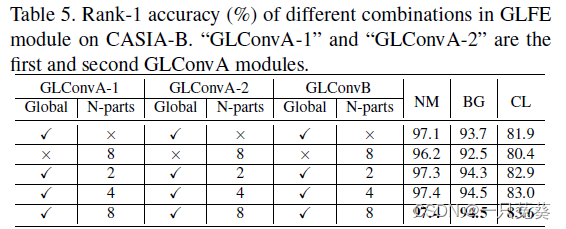
5.3 消融实验
6.总结
本文提出了一个新的步态识别框架,基于三维卷积产生具有判别力的特征表示。
首先,为了提取更全面的步态信息,作者提出了一个全局和局部特征提取器(GLFE)来提取稳定的步态特征。其次,为了利用更多的信息,作者引入了局部时间聚合模块(LTA)来取代传统的空间聚合模块。此外,作者还引入了广义均值池化层(GeM)来自适应地聚合空间信息,提高特征映射的性能。
在公共数据集上的实验结果验证了识别框架的有效性。
参考博客:
(ICCV-2021)通过有效的全局-局部特征表示和局部时间聚合进行步态识别(一)



















 2484
2484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











