




一、MVDR算法
1.1 简介
最小方差无失真响应(Mininum Variance Distortionless Response,MVDR)算法最早是J. Capon于1969年提出,用于多维地震阵列传感器的频率-波数分析。随后,Lacoss在1971年将其引入到一维时间序列的分析中。
MVDR算法由于是Capon提出的,所以也将其称为Capon算法。
1.2 原理
根据数字波束形成的原理,得到输入信号
x
(
n
)
x(n)
x(n) 经空域滤波后的输出为:
y
(
n
)
=
w
H
x
(
n
)
=
w
H
a
(
θ
)
s
(
n
)
(
1
−
1
)
y(n)=w^{H}x(n)=w^{H}a(θ)s(n) (1-1)
y(n)=wHx(n)=wHa(θ)s(n)(1−1)
其中,输入信号
x
(
n
)
x(n)
x(n) 为期望、干扰、噪声三种信号的耦合;
a
(
θ
)
a(θ)
a(θ) 为导向矢量。
当一个远场窄带信号
s
(
n
)
s(n)
s(n) 入射到 M 个阵元的均匀线阵时,阵列输出信号的平均功率为:
P
(
θ
)
=
E
[
∣
y
(
n
)
∣
2
]
=
E
[
w
H
x
(
n
)
x
H
(
n
)
w
]
=
w
H
R
w
(
1
−
2
)
P(θ)=E[|y(n)|^2]=E[w^{H}x(n)x^{H}(n)w]=w^{H}Rw (1-2)
P(θ)=E[∣y(n)∣2]=E[wHx(n)xH(n)w]=wHRw(1−2)
式(1-2)中
R
=
E
[
x
(
n
)
x
H
(
n
)
]
R=E[x(n)x^{H}(n)]
R=E[x(n)xH(n)] 为接收信号
x
(
n
)
x(n)
x(n) 的空间相关矩阵。
假设期望信号从
θ
0
θ_{0}
θ0 方向入射,阵列接收信号为
x
0
(
n
)
=
a
(
θ
0
)
s
(
n
)
x_{0}(n)=a(θ_{0})s(n)
x0(n)=a(θ0)s(n) ,为了使
x
0
(
n
)
x_{0}(n)
x0(n) 通过空域滤波器后无失真,权矢量
w
w
w 需满足:
w
H
a
(
θ
0
)
=
1
(
1
−
3
)
w^{H}a(θ_{0})=1 (1-3)
wHa(θ0)=1(1−3)
选择的加权矢量
w
w
w 满足式(1-3)就可以实现对干扰信号以及噪声的抑制,从而使输出信号的平均功率
P
(
θ
)
P(θ)
P(θ) 最小。由此可以建立目标优化方程为:

采用拉格朗日乘数法对式(1-4)构造代价函数为:
J
(
w
)
=
w
H
R
w
+
λ
(
w
H
a
(
θ
0
)
−
1
)
(
1
−
5
)
J(w)=w^{H}Rw+λ(w^{H}a(θ_{0})-1) (1-5)
J(w)=wHRw+λ(wHa(θ0)−1)(1−5)
对式(1-5)关于
w
w
w 求梯度,并令其为零,得到:
▽
J
(
w
)
=
2
R
w
−
2
λ
a
(
θ
0
)
=
0
(
1
−
6
)
▽J(w)=2Rw-2λa(θ_{0})=0 (1-6)
▽J(w)=2Rw−2λa(θ0)=0(1−6)
解得:
w
=
λ
R
−
1
a
(
θ
0
)
w=λR^{-1}a(θ_{0})
w=λR−1a(θ0) ,将结果代入式(1-3)可得:
λ
=
1
a
H
(
θ
0
)
R
−
1
a
(
θ
0
)
(
1
−
7
)
λ=\frac{1}{a^{H}(θ_{0})R^{-1}a(θ_{0})} (1-7)
λ=aH(θ0)R−1a(θ0)1(1−7)
将式(1-7)代入求得的权矢量结果中,可得到 MVDR 波束形成器的最优权向量为:
w
o
p
t
=
R
−
1
a
(
θ
0
)
a
H
(
θ
0
)
R
−
1
a
(
θ
0
)
(
1
−
8
)
w_{opt}=\frac{R^{-1}a(θ_{0})}{a^{H}(θ_{0})R^{-1}a(θ_{0})} (1-8)
wopt=aH(θ0)R−1a(θ0)R−1a(θ0)(1−8)
以上就是 MVDR 波束形成求权值的完整过程。当阵列的阵元个数为
M
M
M 时,阵列的自由度为
M
−
1
M-1
M−1,所以 MVDR 波束形成器要求干扰源个数必须小于或等于
M
−
1
M-1
M−1。
在实际情况中,阵列的接收数据协方差矩阵只能在有限次快拍的情况下,用时间平均对采样数据进行估计得到,即:
R
ˆ
=
1
N
∑
n
=
1
N
x
(
n
)
x
H
(
n
)
(
1
−
9
)
R^{ˆ}=\frac{1}{N}\sum_{n=1}^{N}x(n)x^{H}(n) (1-9)
Rˆ=N1n=1∑Nx(n)xH(n)(1−9)
其中,
N
N
N 是采样快拍数,
N
N
N 值越大,估计矩阵
R
ˆ
R^{ˆ}
Rˆ 更接近理想的相关矩阵
R
R
R。
1.3 特点
1.3.1 优点
(1)高分辨率:MVDR算法能够有效地分辨出多个声源的方向,具有较高的分辨率。这使得它在处理复杂声学环境时能够提供更准确的声源定位信息。
(2)鲁棒性强:MVDR算法对噪声和混响信号具有较强的鲁棒性。在存在噪声和混响的环境中,该算法能够较好地保持对声源方向的估计能力,提高系统的稳定性和可靠性。
(3)计算量相对较小:相较于一些更复杂的算法,MVDR算法的计算量相对较小,这使得它在实时性要求较高的应用场景中具有一定的优势。
(4)干扰抑制能力强:MVDR算法通过最小化其他方向的信号功率,能够有效地抑制多径干扰和噪声,提高信号的质量。这在无线通信、声纳和雷达等领域尤为重要。
1.3.2 缺点
(1)远场假设限制:MVDR算法假设声源位于远场,即声源与麦克风阵列之间的距离远大于阵列的尺寸。这一假设限制了算法在近场声源定位中的应用,因为对于近场声源,算法的定位精度会显著下降。
(2)对导向矢量误差敏感:MVDR算法的性能在很大程度上依赖于导向矢量的准确性。如果导向矢量存在误差,将会对算法的估计结果产生较大影响,降低定位精度。
(3)阵列尺寸限制:MVDR算法的性能与阵列尺寸有关。一般来说,阵列尺寸越大,算法的性能越好。然而,在实际应用中,受到成本和空间等因素的限制,阵列尺寸往往无法做到足够大,这可能会限制算法的性能。
(4)计算复杂度较高:尽管相对于一些更复杂的算法而言,MVDR算法的计算量较小,但在实时性要求极高的应用场景中,其计算复杂度仍然可能成为一个挑战。此外,为了获得更好的性能,可能需要对算法进行进一步的优化和加速。
二、算法应用实例
2.1 信号的频率估计
仿真1:对目标信号的到达角进行估计
设一维均匀线阵的阵元数目为8,其间距为半波长,有3个目标信号的到达角分别为-30°,0°,20°,利用MVDR算法对该目标信号进行到达角估计,计算结果如下图所示。
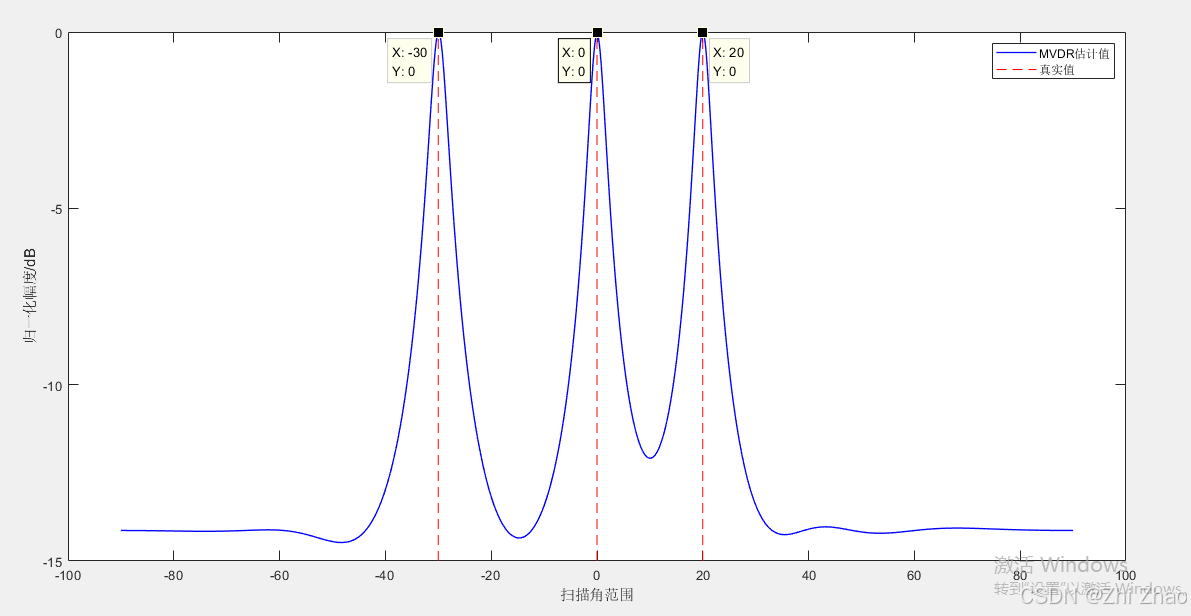
读者可根据自己的需求,设置阵元数、目标信号个数及目标真实角度、信号的信噪比等条件进行实验。
2.2 MATLAB仿真代码
clc;
clear;
close all;
%% MVDR算法估计到达角
d_lambda = 0.5; % 阵元间距与波长比
Rx_Num = 8; % 接收天线阵元数
N = 1000; % 采样快拍数
sigNum = 3; % 信源数目
theta0 = [-30,0,20]; % 真实来波角度
snr = 10; % 信噪比
S = randn(sigNum,N)+1j*randn(sigNum,N); % 远场窄带信号
A = exp(1j*2*pi*d_lambda*sind(theta0).'*(0:Rx_Num-1)).'; % 导向矢量
X = A*S; % 接收信号
Y = awgn(X,snr,'measured'); % 添加噪声的接收信号
R = Y*Y'/N; % 接收数据的协方差矩阵
R_ = inv(R); % 协方差矩阵的逆矩阵
thetaScan = (-90:0.1:90); % 扫描角度范围
As = exp(1j*2*pi*d_lambda*sind(thetaScan).'*(0:Rx_Num-1)).';
num = 0;
P = zeros(1,length(thetaScan)); % 谱峰函数初始化
for ii = thetaScan
num = num+1;
P(num) = 1/(As(:,num)'*R_*As(:,num));
end
P = 10*log10(abs(P)/max(abs(P))); % 对谱峰函数进行归一化并取对数
figure;
plot(thetaScan,P,'b','LineWidth',1);xlabel('扫描角范围');ylabel('归一化幅度/dB');hold on
ylim = get(gca,'Ylim');
for jj = 1:sigNum
% 画出真实波达角的值进行对比
line([theta0(jj) theta0(jj)],[ylim(1) ylim(2)],'Color','r','LineStyle','--');
hold on;
end
legend('MVDR估计值','真实值');
三、参考文献
[1] Capon J. High-resolution frequency-wavenumber spectrum analysis[J]. Proc. IEEE, 1969, 57(8): 1408-1418.
[2] Lacoss R T. Data adaptive spectral analysis methods[J]. Geophysics, 1971, 36(8): 661-675.
[3] 胡君丽.数字阵列接收同时多波束技术研究[D].电子科技大学,2019.



















 2506
2506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











