






// 直角坐标系x方向上的数据
std::ifstream inputFile_1("/home/hersheya/muav_search/src/m_uav_formation/src/data_x_4.txt"); // 打开文本文件
if (!inputFile_1)
{
std::cout << "无法打开文件" << std::endl;
return 1;
}
std::vector<double> data_x_4; // 用于存储数据的向量
double value_x;
while (inputFile_1 >> value_x)
{ // 从文件中读取数据
data_x_4.push_back(value_x); // 将数据添加到向量中
}
inputFile_1.close(); // 关闭文件
// 直角坐标系y方向上的数据
std::ifstream inputFile_2("/home/hersheya/muav_search/src/m_uav_formation/src/data_y_4.txt"); // 打开文本文件
if (!inputFile_2)
{
std::cout << "无法打开文件" << std::endl;
return 1;
}
std::vector<double> data_y_4; // 用于存储数据的向量
double value_y;
while (inputFile_2 >> value_y)
{ // 从文件中读取数据
data_y_4.push_back(value_y); // 将数据添加到向量中
}
inputFile_2.close(); // 关闭文件
上面编译之后运行roslaunch是没有问题的格式,虽然我一开始那两个数据txt放在整个节点同样的目录下,像下面这种就会报错
// 直角坐标系x方向上的数据
std::ifstream inputFile_1("data_x_4.txt"); // 打开文本文件
if (!inputFile_1)
{
std::cout << "无法打开文件" << std::endl;
return 1;
}
std::vector<double> data_x_4; // 用于存储数据的向量
double value_x;
while (inputFile_1 >> value_x)
{ // 从文件中读取数据
data_x_4.push_back(value_x); // 将数据添加到向量中
}
inputFile_1.close(); // 关闭文件
// 直角坐标系y方向上的数据
std::ifstream inputFile_2("data_y_4.txt"); // 打开文本文件
if (!inputFile_2)
{
std::cout << "无法打开文件" << std::endl;
return 1;
}
std::vector<double> data_y_4; // 用于存储数据的向量
double value_y;
while (inputFile_2 >> value_y)
{ // 从文件中读取数据
data_y_4.push_back(value_y); // 将数据添加到向量中
}
inputFile_2.close(); // 关闭文件
以下是报错的结果
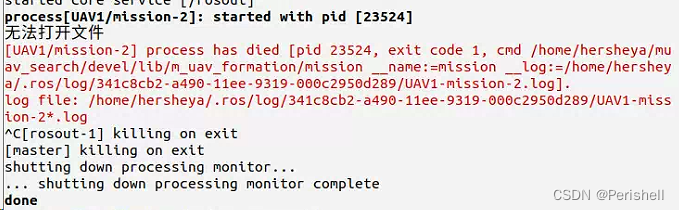
还是写绝对路径比较好!!!解决。
















 5185
5185











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











