



目的是超声测距,OLED显示前方障碍的距离,距离过小时,蜂鸣器报警,且距离越小报警蜂鸣频率越快。
https://blog.csdn.net/wangguchao/article/details/79069037
【1】基本原理
超声波发射模块向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
【2】计算公式
距离 = 声速 × 发出超声波到接收返回的时间/2
因为超声波在空气中的传播速度受温度影响。声波在空气中的传播速度与温度的关系是:
在20摄氏度时,声速V = 332 + 0.607t (m/s)
利用超声波进行距离测量,要求精度一般都不高,取20摄氏度时候的声速344M/S进行计算,再进行适当的补偿就可以。所以,其计算公式为:距离L = 344M/S * T / 2 = 172M/S * T 。
【3】实现步骤
1-产生8个40KHz的超声波信号,通过TX引脚发射出去。
2-启动定时器,计算计数脉冲。
3-等待超声波信号返回,如果接收到反射回来的信号,RX引脚变为低电平。
4-停止定时器,读取脉冲个数,即获得时间T。
5-根据公式,L = V * T /2m,进行距离的计算。
超声波模块HC-SRO4
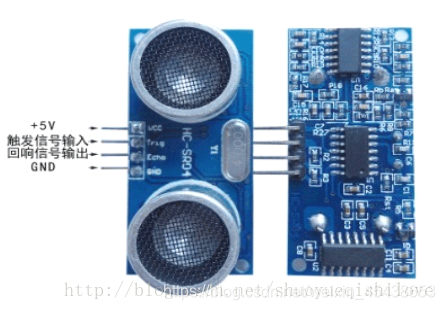
5v和GND为模块提供电能,Trig用于触发模块测距,Echo用于接受返回电平信号。
1:使用电压:DC5V
2:静态电流:小于2mA
3:电平输出:高5V
4:电平输出:底0V
5:感应角度:不大于15度
6:探测距离:2cm-450cm
7:高精度:可达0.3cm
板上接线方式,VCC—+5V、trig(控制端)–PA8、 echo(接收端)–PA7、out(空脚)、GND–地
注: TRIP引脚是内部上拉10K的电阻,用单片机的IO口拉低TRIP引脚,然后给一个10us以上的脉冲信号。
OUT脚为此模块作为防盗模块时的开关量输出脚,测距模块不用此脚!
操作时序图:
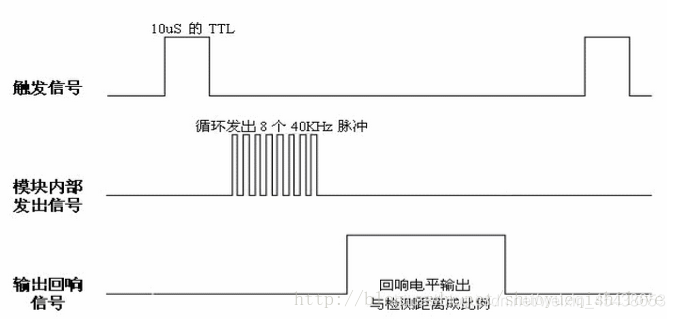
采用IO口TRIG触发测距,给最少10us的高电平信号。模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,同时开定时器计时,当此口变为低电平时就可以读定时器的值,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;us/58=厘米或者us/148=英寸;(us为回响高电平信号持续时间)建议测量周期为 60ms以上,以防止发射信号对回响信号的影响。
如上图所示,STM32给Trig引脚一个超过10us的高电平,就可以使能模块内部的测距电路,模块会循环发出8个40kHz脉冲,发射出超声波,然后通过检测Echo引脚的高电平时间就可以测量出模块与障碍物之间的距离。其计算公式可表示如下:
distance=(340∗Echo高电平时间)/2
OLED12864
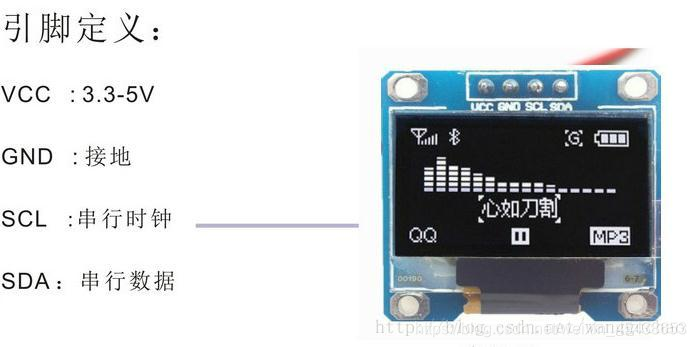
如图用的IIC通信。SCL—PB6,SCL—PB7
4)BEEP(无源)
无源蜂鸣器意思是需要加音频驱动信号才能使其发出声音,与有源蜂鸣器相对应。有源蜂鸣器只需要通上直流电即会发出蜂鸣声,有源蜂鸣器内部自带振荡器!
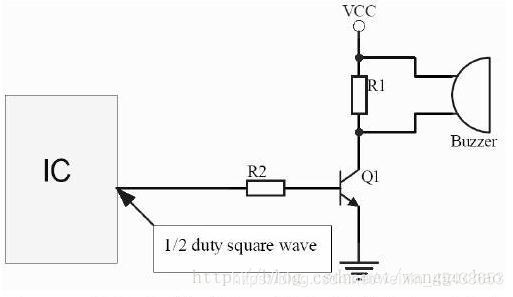
+接PA11,-接GND,定时器PWM脉冲驱动。
用STM32的输入捕获模式来完成超声波测距
https://blog.csdn.net/qq_33286712/article/details/75740811
输入捕获模式
在输入捕获模式下,当检测到ICx信号上相应的边沿后,计数器的当前值被锁存到捕获/比较寄存 器(TIMx_CCRx)中。当发生捕获事件时,相应的CCxIF标志(TIMx_SR寄存器)被置1,如果开放 了中断或者DMA操作,则将产生中断或者DMA请求。如果发生捕获事件时CCxIF标志已经为 高,那么重复捕获标志CCxOF(TIMx_SR寄存器)被置1。写CCxIF=0可清除CCxIF,或读取存储 在TIMx_CCRx寄存器中的捕获数据也可清除CCxIF。写CCxOF=0可清除CCxOF。 以下例子说明如何在TI1输入的上升沿时捕获计数器的值到TIMx_CCR1寄存器中,步骤如下:
● 选择有效输入端:TIMx_CCR1必须连接到TI1输入,所以写入TIMx_CCR1寄存器中的 CC1S=01,只要CC1S不为’00’,通道被配置为输入,并且TIMx_CCR1寄存器变为只读。
● 根据输入信号的特点,配置输入滤波器为所需的带宽(即输入为TIx时,输入滤波器控制位是 TIMx_CCMRx寄存器中的ICxF位)。假设输入信号在多5个内部时钟周期的时间内抖动, 我们须配置滤波器的带宽长于5个时钟周期;因此我们可以(以fDTS频率)连续采样8次,以确 认在TI1上一次真实的边沿变换,即在TIMx_CCMR1寄存器中写入IC1F=0011。
● 选择TI1通道的有效转换边沿,在TIMx_CCER寄存器中写入CC1P=0(上升沿)
● 配置输入预分频器。在本例中,我们希望捕获发生在每一个有效的电平转换时刻,因此预 分频器被禁止(写TIMx_CCMR1寄存器的IC1PS=00)。
● 设置TIMx_CCER寄存器的CC1E=1,允许捕获计数器的值到捕获寄存器中。
● 如果需要,通过设置TIMx_DIER寄存器中的CC1IE位允许相关中断请求,通过设置 TIMx_DIER寄存器中的CC1DE位允许DMA请求。 当发生一个输入捕获时:
● 产生有效的电平转换时,计数器的值被传送到TIMx_CCR1寄存器。
● CC1IF标志被设置(中断标志)。当发生至少2个连续的捕获时,而CC1IF未曾被清除, CC1OF也被置1。
● 如设置了CC1IE位,则会产生一个中断
● 如设置了CC1DE位,则还会产生一个DMA请求。 为了处理捕获溢出,建议在读出捕获溢出标志之前读取数据,这是为了避免丢失在读出捕获溢 出标志之后和读取数据之前可能产生的捕获溢出信息。 注:
设置 TIMx_EGR 寄存器中相应的 CCxG 位,可以通过软件产生输入捕获中断和 / 或 DMA 请求。
输入捕获实验
输入捕获模式可以用来测量脉冲宽度或者测量频率。STM32的定时器,除了TIM6和TIM7, 其他定时器都有输入捕获功能。STM32 的输入捕获,简单的说就是通过检测 TIMx_CHx 上的 边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT) 存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。同时还可以配置 捕获时是否触发中断/DMA 等。 本章我们用到 TIM5_CH1 来捕获高电平脉宽,也就是要先设置输入捕获为上升沿检测,记 录发生上升沿的时候 TIM5_CNT 的值。然后配置捕获信号为下降沿捕获,当下降沿到来时,发 生捕获,并记录此时的 TIM5_CNT 值。这样,前后两次 TIM5_CNT 之差,就是高电平的脉宽, 同时 TIM5 的计数频率我们是知道的,从而可以计算出高电平脉宽的准确时间。 接下来,我们介绍我们本章需要用到的一些寄存器配置,需要用到的寄存器有:TIMx_ARR、 TIMx_PSC、TIMx_CCMR1、TIMx_CCER、TIMx_DIER、TIMx_CR1、TIMx_CCR1 这些寄存 器在前面 2 章全部都有提到(这里的 x=5),我们这里就不再全部罗列了,我们这里针对性的介绍 这几个寄存器的配置。 首先 TIMx_ARR 和 TIMx_PSC,这两个寄存器用来设自动重装载值和 TIMx 的时钟分频, 用法同前面介绍的,我们这里不再介绍。 再来看看捕获/比较模式寄存器 1:TIMx_CCMR1,这个寄存器在输入捕获的时候,非常有 用,有必要重新介绍,该寄存器的各位描述如图 15.1.1 所示:

当在输入捕获模式下使用的时候,对应图 15.1.1 的第二行描述,从图中可以看出, TIMx_CCMR1 明显是针对 2 个通道的配置,低八位[7:0]用于捕获/比较通道 1 的控制,而高八 位[15:8]则用于捕获/比较通道 2 的控制,因为 TIMx 还有 CCMR2 这个寄存器,所以可以知道 CCMR2 是用来控制通道 3 和通道 4(详见《STM32 参考手册》290 页,14.4.8 节)。 这里我们用到的是 TIM5 的捕获/比较通道 1,我们重点介绍 TIMx_CMMR1 的[7:0]位(其 实高 8 位配置类似),TIMx_CMMR1 的[7:0]位详细描述见图 15.1.2 所示:
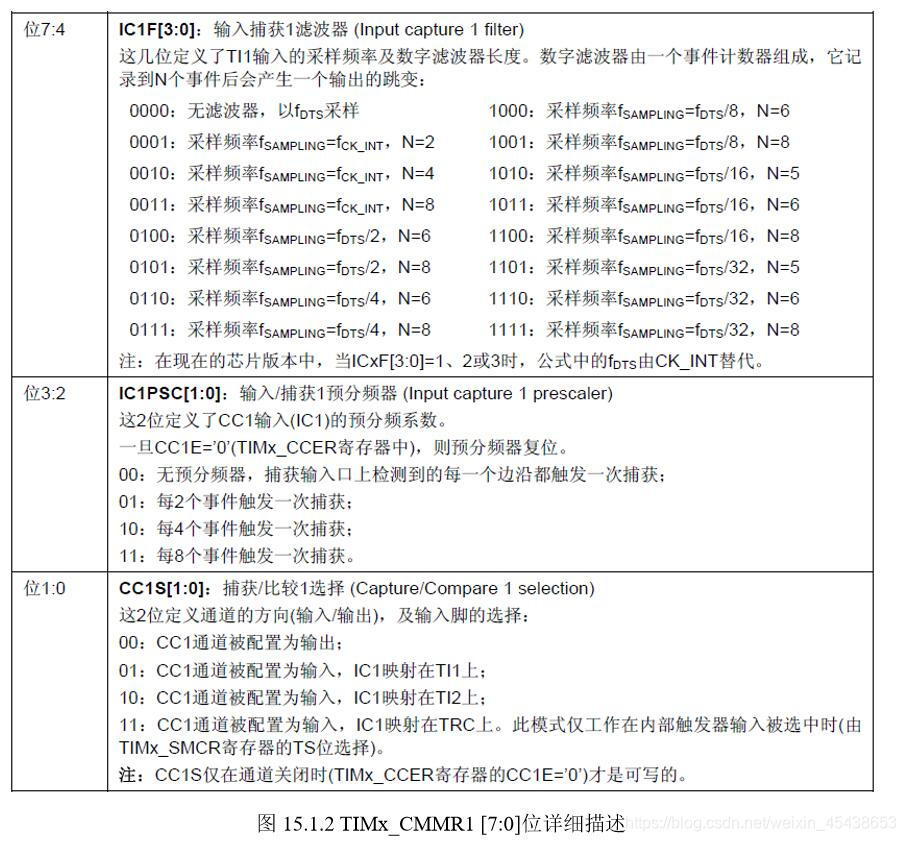
其中 CC1S[1:0],这两个位用于 CCR1 的通道配置,这里我们设置 IC1S[1:0]=01,也就是配 置 IC1 映射在 TI1 上(关于 IC1,TI1 不明白的,可以看《STM32 参考手册》14.2 节的图 98通用定时器框图),即 CC1 对应 TIMx_CH1。 输入捕获 1 预分频器 IC1PSC[1:0],这个比较好理解。我们是 1 次边沿就触发 1 次捕获,所 以选择 00 就是了。
输入捕获 1 滤波器 IC1F[3:0],这个用来设置输入采样频率和数字滤波器长度。其中, fCK_INT
是定时器的输入频率(TIMxCLK),一般为 72Mhz,而 fDTS 则是根据 TIMx_CR1 的 CKD[1:0] 的设置来确定的,如果 CKD[1:0]设置为 00,那么fDTS = fCK_INT。N 值就是滤波长度,举个简单的例子:假设 IC1F[3:0]=0011,并设置 IC1 映射到通道 1 上,且为上升沿触发,那么在捕获到上升沿的时候,再以 的频率,连续采样到 8 次通道 1 的电平,如果都是高电平,则说明却是一个有效的触发,就会触发输入捕获中断(如果开启了的话)。这样可以滤除那些高电平 脉宽低于 8 个采样周期的脉冲信号,从而达到滤波的效果。这里,我们不做滤波处理,所以设置 IC1F[3:0]=0000,只要采集到上升沿,就触发捕获。 再来看看捕获/比较使能寄存器:TIMx_CCER,该寄存器的各位描述见图 14.1.2(在第 14 章)。本章我们要用到这个寄存器的最低 2 位,CC1E 和 CC1P 位。这两个位的描述如图 15.1.3 所示:
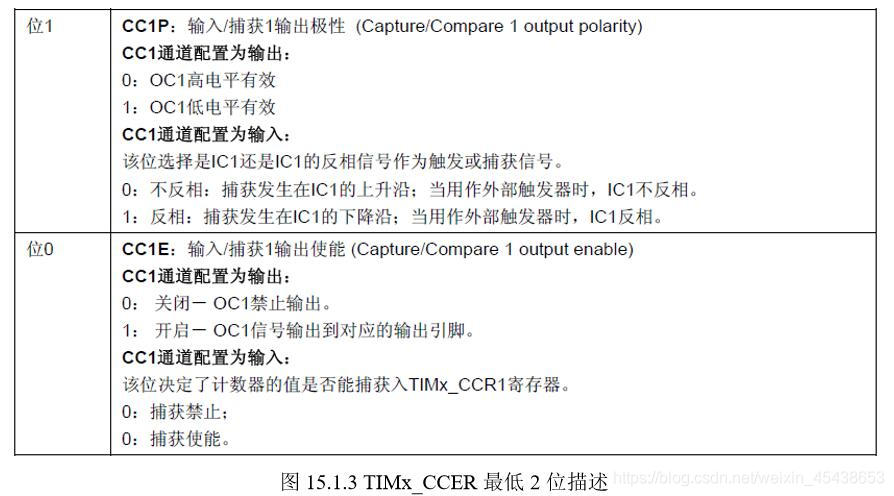
所以,要使能输入捕获,必须设置 CC1E=0,而 CC1P 则根据自己的需要来配置。 接下来我们再看看 DMA/中断使能寄存器:TIMx_DIER,该寄存器的各位描述见图 13.1.2 (在第 13 章),本章,我们需要用到中断来处理捕获数据,所以必须开启通道 1 的捕获比较中 断,即 CC1IE 设置为 1。 控制寄存器:TIMx_CR1,我们只用到了它的最低位,也就是用来使能定时器的,这里前 面两章都有介绍,请大家参考前面的章节。 最后再来看看捕获/比较寄存器 1:TIMx_CCR1,该寄存器用来存储捕获发生时,TIMx_CNT 的值,我们从 TIMx_CCR1 就可以读出通道 1 捕获发生时刻的 TIMx_CNT 值,通过两次捕获(一 次上升沿捕获,一次下降沿捕获)的差值,就可以计算出高电平脉冲的宽度。 至此,我们把本章要用的几个相关寄存器都介绍完了,本章要实现通过输入捕获,来获取 TIM5_CH1(PA0)上面的高电平脉冲宽度,并从串口打印捕获结果。下面我们介绍输入捕获的配 置步骤:
1)开启 TIM5 时钟和 GPIOA 时钟,配置 PA0 为下拉输入。
要使用 TIM5,我们必须先开启 TIM5 的时钟。这里我们还要配置 PA0 为下拉输入,因为 我们要捕获 TIM5_CH1 上面的高电平脉宽,而 TIM5_CH1 是连接在 PA0 上面的。 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能 TIM5 时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能 GPIOA 时钟
这两个函数的使用在前面多次提到,还有 GPIO 初始化,这里也不重复了。
2)初始化 TIM5,设置 TIM5 的 ARR 和 PSC。
在开启了 TIM5 的时钟之后,我们要设置 ARR 和 PSC 两个寄存器的值来设置输入捕获的 自动重装载值和计数频率。这在库函数中是通过 TIM_TimeBaseInit 函数实现的,在上面章节已 经讲解过,这里不重复讲解。
TIM_TimeBaseInitTypeDef
TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据指定的参数初始化 Tim5
3)设置 TIM5 的输入比较参数,开启输入捕获 输入比较参数的设置包括映射关系,滤波,分频以及捕获方式等。
这里我们需要设置通道 1 为输入模式,且 IC1 映射到 TI1(通道 1)上面,并且不使用滤波(提高响应速度)器,上升沿捕 获。
库函数是通过 TIM_ICInit 函数来初始化输入比较参数的:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
同样,我们来看看参数设置结构体 TIM_ICInitTypeDef 的定义:
typedef struct {
uint16_t TIM_Channel;
uint16_t TIM_ICPolarity;
uint16_t TIM_ICSelection;
uint16_t TIM_ICPrescaler;
uint16_t TIM_ICFilter;
} TIM_ICInitTypeDef;
参数 TIM_Channel 很好理解,用来设置通道。我们设置为通道 1,为 TIM_Channel_1。 参数 TIM_ICPolarit 是 用 来 设 置 输 入 信 号 的 有效捕获极性, 这 里 我 们 设 置 为 TIM_ICPolarity_Rising,上升沿捕获。同时库函数还提供了单独设置通道 1 捕获极性的函数为:
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling),
这表示通道 1 为上升沿捕获,我们后面会用到,同时对于其他三个通道也有一个类似的函数, 使用的时候一定要分清楚使用的是哪个通道该调用哪个函数,格式为TIM_OCxPolarityConfig()。
参数 TIM_ICSelection 是用来设置映射关系,我们配置 IC1 直接映射在 TI1 上,选择 TIM_ICSelection_DirectTI。 参数 TIM_ICPrescaler 用来设置输入捕获分频系数,我们这里不分频,所以选中 TIM_ICPSC_DIV1,还有 2,4,8 分频可选。 参数 TIM_ICFilter 设置滤波器长度,这里我们不使用滤波器,所以设置为 0。 这些参数的意义,在我们讲解寄存器的时候举例说明过,这里不做详细解释。 我们的配置代码是:
TIM_ICInitTypeDef TIM5_ICInitStructure;
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1 映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure);
4)使能捕获和更新中断(设置 TIM5 的 DIER 寄存器)
因为我们要捕获的是高电平信号的脉宽,所以,第一次捕获是上升沿,第二次捕获时下降 沿,必须在捕获上升沿之后,设置捕获边沿为下降沿,同时,如果脉宽比较长,那么定时器就 会溢出,对溢出必须做处理,否则结果就不准了。这两件事,我们都在中断里面做,所以必须开启捕获中断和更新中断。 这里我们使用定时器的开中断函数 TIM_ITConfig 即可使能捕获和更新中断:
TIM_ITConfig( TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断和捕获中断
5)设置中断分组,编写中断服务函数
设置中断分组的方法前面多次提到这里我们不做讲解,主要是通过函数 NVIC_Init()来完 成。分组完成后,我们还需要在中断函数里面完成数据处理和捕获设置等关键操作,从而实现 高电平脉宽统计。在中断服务函数里面,跟以前的外部中断和定时器中断实验中一样,我们在 中断开始的时候要进行中断类型判断,在中断结束的时候要清除中断标志位。使用到的函数在 上面的实验已经讲解过,分别为 TIM_GetITStatus()函数和 TIM_ClearITPendingBit()函数。
if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET){}//判断是否为更新中断
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET){}//判断是否发生捕获事件
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update);//清除中断和捕获标志位
6)使能定时器(设置 TIM5 的 CR1 寄存器)
最后,必须打开定时器的计数器开关, 启动 TIM5 的计数器,开始输入捕获。 TIM_Cmd(TIM5,ENABLE ); //使能定时器 5
通过以上 6 步设置,定时器 5 的通道 1 就可以开始输入捕获了
15.3 软件设计
打开光盘的输入捕获实验,可以看到,我们的工程和上一个实验没有什么改动。因为我们 的输入捕获代码是直接添加在 timer.c 和 timer.h 中。同时输入捕获相关的库函数还是在 stm32f10x_tim.c 和 stm32f10x_tim.h 文件中。 我们在 timer.c 里面加入如下代码:
//定时器 5 通道 1 输入捕获配置
TIM_ICInitTypeDef TIM5_ICInitStructure;
void TIM5_Cap_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //①使能 TIM5 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //①使能 GPIOA 时钟
//初始化 GPIOA.0 ①
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化 GPIOA.0
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉
//②初始化 TIM5 参数
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //初始化 TIMx
//③初始化 TIM5 输入捕获通道 1
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1 映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x00; //IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure); //初始化 TIM5 输入捕获通道 1
//⑤初始化 NVIC 中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //TIM3 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级 2 级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级 0 级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化 NVIC
TIM_ITConfig( TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//④允许更新中断捕获中断
TIM_Cmd(TIM5,ENABLE ); //⑥使能定时器 5
}
u8 TIM5CH1_CAPTURE_STA=0; //输入捕获状态
u16 TIM5CH1_CAPTURE_VAL; //输入捕获值
//⑤定时器 5 中断服务程序
void TIM5_IRQHandler(void)
{
if((TIM5CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
{
if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)
{
if(TIM5CH1_CAPTURE_STA&0X40) //已经捕获到高电平了
{
if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM5CH1_CAPTURE_VAL=0XFFFF;
} else TIM5CH1_CAPTURE_STA++;
}
}
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET) //捕获 1 发生捕获事件
{
if(TIM5CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次上升沿
TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //设置为上升沿捕获
} else //还未开始,第一次捕获上升沿
{
TIM5CH1_CAPTURE_STA=0; //清空
TIM5CH1_CAPTURE_VAL=0;
TIM_SetCounter(TIM5,0);
TIM5CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}
此部分代码包含 2 个函数,其中 TIM5_Cap_Init 函数用于 TIM5 通道 1 的输入捕获设置, 其设置和我们上面讲的步骤是一样的,这里就不多说,我们通过标号①~⑥标注了前面讲解的 步骤,大家可以对照看一下。重点来看看第二个函数。 TIM5_IRQHandler 是 TIM5 的中断服务函数,该函数用到了两个全局变量,用于辅助实现 高电平捕获。其中 TIM5CH1_CAPTURE_STA,是用来记录捕获状态,该变量类似我们在 usart.c 里面自行定义的 USART_RX_STA 寄存器(其实就是个变量,只是我们把它当成一个寄存器那样 来使用)。TIM5CH1_CAPTURE_STA 各位描述如表 15.3.1 所示:

另外一个变量 TIM5CH1_CAPTURE_VAL,则用来记录捕获到下降沿的时候,TIM5_CNT 的值。 现在我们来介绍一下,捕获高电平脉宽的思路:首先,设置 TIM5_CH1 捕获上升沿,这在 TIM5_Cap_Init 函数执行的时候就设置好了,然后等待上升沿中断到来,当捕获到上升沿中断,此时如果 TIM5CH1_CAPTURE_STA 的第 6 位为 0,则表示还没有捕获到新的上升沿,就先把 TIM5CH1_CAPTURE_STA、TIM5CH1_CAPTURE_VAL 和 TIM5->CNT 等清零,然后再设置 TIM5CH1_CAPTURE_STA 的第 6 位为 1,标记捕获到高电平,最后设置为下降沿捕获,等待 下降沿到来。
如果等待下降沿到来期间,定时器发生了溢出,就在 TIM5CH1_CAPTURE_STA 里面对溢出次数进行计数,当最大溢出次数来到的时候,就强制标记捕获完成(虽然此时还没 有捕获到下降沿)。
当下降沿到来的时候,先设置 TIM5CH1_CAPTURE_STA 的第 7 位为 1,标 记成功捕获一次高电平,然后读取此时的定时器值到 TIM5CH1_CAPTURE_VAL 里面,最后设 置为上升沿捕获,回到初始状态。
这样,我们就完成一次高电平捕获了,只要 TIM5CH1_CAPTURE_STA 的第 7 位一直为 1, 那么就不会进行第二次捕获,我们在main函数处理完捕获数据后,将TIM5CH1_CAPTURE_STA 置零,就可以开启第二次捕获。
这里我们还使用到一个函数 TIM_OC1PolarityConfig 来修改输入捕获通道 1 的极性的。相信这 个不难理解:
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity)
要设置为上升沿捕获,则为:
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //设置为上升沿捕获
还有一个函数用来设置计数器寄存器值,这个同样很好理解:
TIM_SetCounter(TIM5,0);
上行代码的意思就是计数值清零。
头文件 timer.h 比较简单,这里我们就不多说了。
接下来,我们修改主程序里面的 main 函数如下:
extern u8 TIM5CH1_CAPTURE_STA; //输入捕获状态
extern u16 TIM5CH1_CAPTURE_VAL; //输入捕获值
int main(void)
{
u32 temp=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置 NVIC 中断分组 2
uart_init(115200); //串口初始化波特率为 115200
LED_Init(); //LED 端口初始化
TIM3_PWM_Init(899,0); //不分频。PWM 频率=72000/(899+1)=80Khz
TIM5_Cap_Init(0XFFFF,72-1); //以 1Mhz 的频率计数 // 0XFFFF就等于65535,
while(1)
{
delay_ms(10);
TIM_SetCompare2(TIM3,TIM_GetCapture2(TIM3)+1);//CNT在自加到ARR值的过程中会不断和
CCRX的值相比较,一旦二者相等就产生匹配事件,但要注意CNT不会理会这件事,
它会继续++直到等于ARR。占空比=CCR/ARR
if(TIM_GetCapture2(TIM3)==300)
TIM_SetCompare2(TIM3,0);
if(TIM5CH1_CAPTURE_STA&0X80)//成功捕获到了一次上升沿
{
temp=TIM5CH1_CAPTURE_STA&0X3F;
temp*=65536;//溢出时间总和 //溢出一次为65536us
temp+=TIM5CH1_CAPTURE_VAL;//得到总的高电平时间
printf("HIGH:%d us\r\n",temp); //打印总的高点平时间
TIM5CH1_CAPTURE_STA=0; //开启下一次捕获
}
}
}
该 main 函数是在 PWM 实验的基础上修改来的,我们保留了 PWM 输出,同时通过设置 TIM5_Cap_Init(0XFFFF,72-1),将 TIM5_CH1 的捕获计数器设计为 1us 计数一次,并设置重装 载值为最大,所以我们的捕获时间精度为 1us。
主函数通过 TIM5CH1_CAPTURE_STA 的第 7 位,来判断有没有成功捕获到一次高电平, 如果成功捕获,则将高电平时间通过串口输出到电脑。
至此,我们的软件设计就完成了.
[防抖!] [其中有 2 次高电平在 50us 以内的,这种就是按键按下时发生的抖动。这 就是为什么我们按键输入的时候,一般都需要做防抖处理,防止类似的情况干扰正常输入。大 家还可以用杜邦线连接 PA0 和 PB5,看看上一节中我们设置的 PWM 输出的高电平是如何变化 的。 ]
代码的核心部分如下所示:
//PA2-发送触发脉冲
//PA0-接收回响信号
void TIM2_TRIG(void)//触发信号,大于10us的高电平,周期最好大于60ms
{
TRIG_H;
Delay_us(15);
TRIG_L;
Delay_us(60000);
}
void TIM2_Initi(uint16_t Period,uint16_t Prescaler)//65534,71
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
Flag=1;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PA0-TIM2 CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;//PA2-TIM2-CH2
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //
TIM_TimeBaseStructure.TIM_Prescaler = Prescaler; //
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//
TIM_TimeBaseStructure.TIM_Period = Period; //
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;//TIM2 CH1
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;//
TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_DirectTI;//IC1-TI1
TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1;//
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;//TIM2 CH2
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Falling;//
TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_IndirectTI;//IC2-TI1
TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1;//
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_SelectInputTrigger(TIM2,TIM_TS_TI1FP1);
TIM_SelectSlaveMode(TIM2,TIM_SlaveMode_Reset);
TIM_ITConfig(TIM2,TIM_IT_CC1|TIM_IT_CC2,ENABLE);//
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
//接着是中断函数,捕获到上升沿时定时器从零开启计时,下降沿时取出定时器里的数便是声波往返的时间
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_CC1) == SET)//检测到上升沿
{
if(Flag!=1)
{
ICAP1value = TIM_GetCapture1(TIM2);//计这个值其实是没有意义的
Flag=1;
distance2=((ICAP2value/2.0)*0.34)/10.0;//距离计算单位cm,声波速度340m/s,即0.34mm/us
printf("\r\n distance2= %.2f\r\n",distance2);
}
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
}
else if(TIM_GetITStatus(TIM2, TIM_IT_CC2) == SET)//检测到下降沿
{
Flag=0;
ICAP2value = TIM_GetCapture2(TIM2);
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
}
}
蓝桥杯训练样例
在蓝桥杯“单片机设计与开发”比赛中,超声波测距是一直以来都是国赛中重要的考点,几乎每届必考。虽然省赛还没有考过,但也不能排除以后不考哦。很多同学会觉得超声波测距很难,原因有二,一是它和其他的外设模块不同,没有底层驱动代码提供;二是同学们不了解其工作原理与实现步骤。其实,超声波测距一点都不难,希望小蜜蜂老师的文章能够帮到你。
在蓝桥杯单片机的竞赛综合平台CT107D中,超声波模块的TX引脚接到单片机的P1.0端口,RX引脚接到单片机的P1.1端口。设计程序,进行超声波测距,最大测量范围约140cm。测量结果用cm作为显示单位,显示在数码管的最右边三位。如果测量距离超出范围,则以“F”作为标志,显示在数码管的最左边一位。
参考源码共享
#include "reg52.h"
#include "absacc.h"
#include "intrins.h"
sbit TX = P1^0;
sbit RX = P1^1;
unsigned int distance = 0;
unsigned char code SMG_duanma[18]=
{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,
0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
void DelaySMG(unsigned int t)
{
while(t--);
}
void DisplaySMG_Bit(unsigned char pos, unsigned char value)
{
XBYTE[0xE000] = 0xFF;
XBYTE[0xC000] = 0x01 << pos;
XBYTE[0xE000] = value;
}
void Display_Distance()
{
if(distance == 999)
{
DisplaySMG_Bit(0, SMG_duanma[15]); //超出测量范围标志:F
DelaySMG(500);
}
else
{
DisplaySMG_Bit(5, SMG_duanma[distance / 100]);
DelaySMG(500);
DisplaySMG_Bit(6, SMG_duanma[(distance % 100) / 10]);
DelaySMG(500);
DisplaySMG_Bit(7, SMG_duanma[distance % 10]);
DelaySMG(500);
}
}
void Delay12us() //@12.000MHz 延时12us
{
unsigned char i;
_nop_();
_nop_();
i = 33;
while (--i);
}
void Send_Wave() //产生8个40KHx超声波信号
{
unsigned char i;
for(i = 0; i < 8; i++)
{
TX = 1;
Delay12us();
TX = 0;
Delay12us();
}
}
void Measure_Distance() //超声波测距
{
unsigned int time = 0;
TMOD &= 0x0f; //定时器1模式0,13位,最大8192个计数脉冲
TL1 = 0x00;
TH1 = 0x00;
Send_Wave(); //发送超声波信号
TR1 = 1; //启动定时器
while((RX == 1) && (TF1 == 0)); //等待超声波信号返回或者等到测量超出范围
TR1 = 0; //停止定时器
if(TF1 == 0) //正常测量范围
{
time = TH1;
time = (time << 8) | TL1;
distance = ((time / 10) * 17) / 100 + 3;
}
else //超出测量范围
{
TF1 = 0;
distance = 999;
}
}
void Delay(unsigned char n) //数码管显示增强
{
while(n--)
{
Display_Distance();
}
}
void main()
{
while(1)
{
Measure_Distance();
Delay(10);
}
}
模块驱动程序如下:(芯片是stm32f407)
void HC_SR04_Init(void)
{
/*初始化GPIO*/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能定时器2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6; //Trig:PA4,PA5,PA6
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3; //Echo: PA2,PA3对应TIM2的通道3,4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//打开引脚复用
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_TIM2);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_TIM2);
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//Enable GPIOB's Clock
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PB3 refers to TIM2's channel 2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_TIM2);
GPIO_Init(GPIOB, &GPIO_InitStructure);//initialize GPIOB
/初始化TIM2*/
TIM_TimeBaseStructure.TIM_Period = 0xffffffff; //传感器最大探测距离4000mm,一般不会溢出
TIM_TimeBaseStructure.TIM_Prescaler =84-1; //设置TIM2时钟频率为1MHz
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
//初始化TIM2输入捕获
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_BothEdge; //上升和下降都触发输入捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_3;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_BothEdge;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_4;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_BothEdge;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
//设置输入捕获中断
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC2|TIM_IT_CC3|TIM_IT_CC4,ENABLE);//使能中断
TIM_Cmd(TIM2,ENABLE);
dist.overflow=0;
}
值得注意的是,这里的输入捕获的边缘极性设定为上升和下降沿都捕获,效率比较高,也有大神开始使用上升沿捕获,然后在中断中将捕获记性设定为下降沿捕获,我试过这种办法,程序容易卡死,所以没有采用。
中断程序可以这样编写:
void TIM2_IRQHandler(void)
{
static uint16_t cnt_f,cnt_l,cnt_r;
if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
{
dist.overflow++;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
// printf("overflow\n");
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC2)!=RESET)
{
cnt_f++;
if(cnt_f%2==1)//检测到了上升电平
{
TIM2->CNT=0;//计数器清零
}
else//检测到了下降沿电平,读取距离值
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.f_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("F_dis=%.2fmm\n",dist.f_distance);
dist.overflow=0;
}
if(cnt_f>65535)cnt_f=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC3)!=RESET)
{
cnt_l++;
if(cnt_l%2==1)//检测到了上升电平
{
TIM2->CNT=0;
}
else
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.l_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("L_dis=%.2fmm\n",dist.l_distance);
dist.overflow=0;
}
if(cnt_l>65535)cnt_l=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC4)!=RESET)
{
cnt_r++;
if(cnt_r%2==1)
{
TIM2->CNT=0;
}
else
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.r_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("R_dis=%.2fmm\n",dist.r_distance);
dist.overflow=0;
}
if(cnt_r>65535)cnt_r=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC4);
}
}
这样设计的好处是中断程序设计简单,可以保证实时性。
触发模块进行测量,通过给模块的Trig引脚一个超过10us高电平信号就可以触发模块进行距离测量,程序代码如下:
/*
function:启动距离测量
choice: 0:左边超声波模块
1:中间超声波模块
2:右边超声波模块
*/
void Get_Distance(uint8_t choice)
{
switch(choice)
{
case 0:
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
GPIO_SetBits(GPIOA,GPIO_Pin_4);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
break;
case 1:
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
GPIO_SetBits(GPIOA,GPIO_Pin_5);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
break;
case 2:
GPIO_ResetBits(GPIOA,GPIO_Pin_6);
GPIO_SetBits(GPIOA,GPIO_Pin_6);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_6);
break;
}
}
寄存器版
https://blog.csdn.net/msdnwolaile/article/details/51224209

















 517
517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









