







构建一个简单的CNN卷积神经网络——手写体数字识别(通过摄像头测试)
前言
从简单学起,,,
1.构建一个卷积层
Conv2d
import torch
input=torch.randn(1,5,100,100)
juanji=torch.nn.Conv2d(5,10,kernel_size=3)
output=juanji(input)
print(input.shape)
print(output.shape)
print(juanji.weight.shape)#卷积层权重的形状
torch.Size([1, 5, 100, 100])
torch.Size([1, 10, 98, 98])
torch.Size([10, 5, 3, 3])
MaxPool2d
import torch
input=[3,4,6,5,2,4,6,8,1,6,7,8,9,7,4,6]
input=torch.Tensor(input).view(1,1,4,4)
maxpooling_layer=torch.nn.MaxPool2d(kernel_size=2)#相当于步长为2
output=maxpooling_layer(input)
print(input)
print(output)
2.在类里面使用函数堆积一个卷积层
# 导入用到的包
import math
from collections import OrderedDict
import torch.nn as nn
# 主干网络 类
class DarkNet(nn.Module):
# 初始化 最先执行
def __init__(self):
super(DarkNet, self).__init__()
#调用这个函数 跟类的实例化一样
self.layer1 = self._make_layer([32, 64])
# --------------------------------------------------------------------- #
# 定义的函数层 给主干网络类实例化时调用
# --------------------------------------------------------------------- #
def _make_layer(self, planes):
layers = [] # 创建一个空的网络层数组
# 下采样,步长为2,卷积核大小为3
# 在网络层数组里添加 3*3卷积层 详解看上面
# 下行代码参数的解释 32*3*3卷积
# 参数:in 输入通道数 out 输出通道数 卷积核大小 、步长 、填充 无偏置
layers.append(("ds_conv", nn.Conv2d(inplanes, planes, kernel_size=3, stride=2, padding=1, bias=False)))
# 在网络层数组后面添加 标准化
# 参数:out
layers.append(("ds_bn", nn.BatchNorm2d(planes)))
# 在网络层数组后面添加 LeakyReLU激活函数
# 0.1为x为负数时的需要的一个系数,控制负斜率的角度
layers.append(("ds_relu", nn.LeakyReLU(0.1)))
# OrderedDict 中是按照 添加顺序存储的有序字典 ;
# Sequential 会将这些模块组成一个流水线,输入将依次通过这些模块得到一个输出。
# 最后返回这个残差层
return nn.Sequential(OrderedDict(layers))
# 主干网络的前向传播 初始化后执行
def forward(self, x):
x = self.layer1(x)
return x
# 定义 darknet53 函数 实例化DarkNet 类 传入参数
def darknet53():
model = DarkNet()
return model # 返回模型
3.构建一个简单的卷积网络
先跑完训练部分,再跑测试部分。
手写体识别——CNN训练部分
import torch
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision import transforms
import torch.nn.functional as F
import matplotlib.pyplot as plt
import numpy as np
import os # 添加代码①
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE" # 添加代码②
batch_size = 256 #设置batch大小
transform = transforms.Compose([
transforms.ToTensor(), #转换为张量
transforms.Normalize((0.1307,), (0.3081,)) #设定标准化值
])
#训练集
train_dataset = datasets.MNIST( root='../data/mnist',train=True,transform=transform,download=True)
#测试集
test_dataset = datasets.MNIST(root='../data/mnist',train=False,transform=transform,download=True)
#训练集加载器
train_loader = DataLoader(dataset=train_dataset,batch_size=batch_size,shuffle=True)
#测试集加载器
test_loader = DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
# 设计模型 CNN
class CNN(torch.nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = torch.nn.Conv2d(1, 10, kernel_size=(5,5)) #卷积层1
self.conv2 = torch.nn.Conv2d(10, 20, kernel_size=(5,5)) #卷积层2
self.pooling = torch.nn.MaxPool2d(2) #池化层
self.fc1 = torch.nn.Linear(320, 256) #全连接层1
self.fc2 = torch.nn.Linear(256, 128) #全连接层2
self.fc3 = torch.nn.Linear(128, 10) #全连接层3
def forward(self, x):
# x.shape = 256*1*28*28
batch_size = x.size(0) # 256
# 1*28*28 -> 10*24*24 -> 10*12*12
x = F.relu(self.pooling(self.conv1(x))) #卷积层1->池化层->激活函数Relu
# 10*12*12-> 20*8*8 ->20*4*4
x = F.relu(self.pooling(self.conv2(x))) #卷积层2->池化层->激活函数Relu
# 20*4*4 -> 320
x = x.view(batch_size, -1) #改变张量的维度
# 320 -> 256
x = self.fc1(x) #全连接层1
# 256 -> 128
x = self.fc2(x) #全连接层2
# 128 ->10
x = self.fc3(x) #全连接层3
return x
model = CNN() #实例化()模型为model
device=torch.device("cuda:0"if torch.cuda.is_available()else"cpu")#使用GPU进行计算
model.to(device)#把model模型传入GPU
# 构造损失函数和优化函数
# 损失
criterion = torch.nn.CrossEntropyLoss()
# 优化
optimizer = torch.optim.SGD(model.parameters(), lr=0.1, momentum=0.5)
def train(epoch):
running_loss = 0.0 #每一轮训练重新记录损失值
for batch_idx, data in enumerate(train_loader, 0): #提取训练集中每一个样本
inputs, target = data
inputs, target = inputs.to(device), target.to(device) # 这里的数据(原数据)也要迁移到GPU
# outputs输出为0-9的概率 256*10
outputs = model(inputs) #代入模型
loss = criterion(outputs, target) #计算损失值
loss.backward() #反向传播计算得到每个参数的梯度值
optimizer.step() #梯度下降参数更新
optimizer.zero_grad() #将梯度归零
running_loss += loss.item() #损失值累加
if batch_idx % 300 == 299: #每300个样本输出一下结果
print('[%d,%5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 300))
running_loss = 0.0 # (训练轮次, 该轮的样本次, 平均损失值)
return running_loss
def test():
correct = 0
total = 0
with torch.no_grad(): #执行计算,但不希望在反向传播中被记录
for data in test_loader: #提取测试集中每一个样本
images, labels = data
images, labels = images.to(device), labels.to(device)# 这里的数据(原数据)也要迁移到GPU
# outputs输出为0-9的概率 256*10
outputs = model(images) #带入模型
# torch.max()这个函数返回的是两个值,第一个值是具体的value(我们用下划线_表示)
# 第二个值是value所在的index(也就是predicted)
_, pred = torch.max(outputs.data, dim=1) #获得结果中的最大值
total += labels.size(0) #测试数++
correct += (pred == labels).sum().item() #将预测结果pred与标签labels对比,相同则正确数++
print('%d %%' % (100 * correct / total)) #输出正确率
if __name__ == '__main__':
# 这两个数组主要是为了画图
lossy = [] #定义存放纵轴数据(损失值)的列表
epochx = [] #定义存放横轴数据(训练轮数)的列表
for epoch in range(1): #训练10轮
epochx.append(epoch) #将本轮轮次存入epochy列表
lossy.append(train(epoch)) #执行训练,将返回值loss存入lossy列表
test() #每轮训练完都测试一下正确率
path = "D:/code/text/model1.pth"
#torch.save(model,path)
torch.save(model.state_dict(),path) # 保存模型
model = torch.load("D:/code/text/model1.pth") # 加载模型
#可视化一下训练过程
plt.plot(epochx, lossy)
plt.grid()
plt.show()
手写体识别——摄像头测试部分
import cv2
import os
import torch
#1.调用摄像头,拿出每一帧
#cap =cv2.VideoCapture(0,cv2.CAP_DSHOW)
cap = cv2.VideoCapture(0) #定义视频来源为摄像头
while 1:
ret, frame = cap.read() # 摄像头读取,ret为是否读取成功,frame为视频的每一帧图像
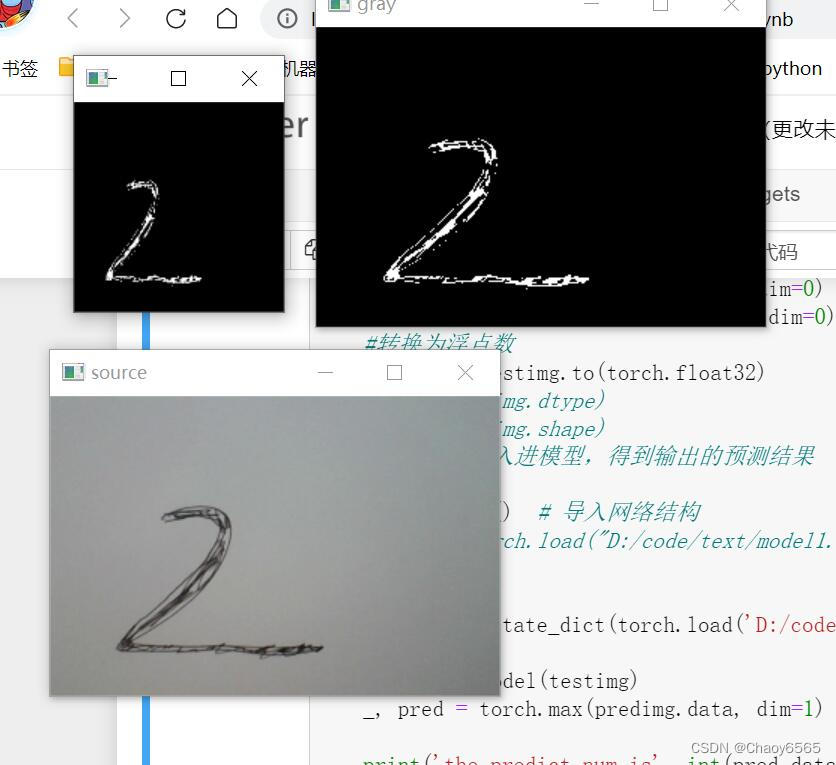
#展示原图像
frame = cv2.resize(frame, (300, 200))
cv2.imshow("source", frame)
#展示灰度,二值化后图像
frame = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) #灰度化
res, frame = cv2.threshold(frame, 90, 255, cv2.THRESH_BINARY_INV) #反向二值化
cv2.imshow("gray", frame)
#展示输入模型的图像(方形)
frame = cv2.resize(frame, (140, 140))
cv2.imshow("28*28", frame)
cv2.waitKey(100) #延时,控制帧率
frame = cv2.resize(frame, (28, 28)) #转换成28*28大小
frame= torch.from_numpy(frame) # 转tensor
#两次升维,使其能送入模型
testimg = torch.unsqueeze(frame , dim=0)
testimg = torch.unsqueeze(testimg, dim=0)
#转换为浮点数
testimg = testimg.to(torch.float32)
# 2.将每一帧输入进模型,得到输出的预测结果
# 加载模型
#model = torch.load("D:/code/text/model1.pth") # 报错
# 解决pytorch加载模型报错TypeError: ‘collections.OrderedDict‘ object is not callable
# 错误原因:之前保存网络时用的方法是torch.save(model, 'Nei.pkl'),这样保存下来的Net.pkl是一个状态字典,而不是模型本身,
# 也就是说Net.pkl中保存的只是网络的参数,而没有网络结构。
model = CNN() # 导入网络结构
model.load_state_dict(torch.load('D:/code/text/model1.pth')) # 导入网络的参数
predimg = model(testimg) #进行预测
_, pred = torch.max(predimg.data, dim=1) #获得最大值
print('the predict num is', int(pred.data[0])) #输出结果
输出结果:
代码注释很详细,这里就不进行讲解了。
总结
未完待续,,,

















 1190
1190











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











