






week3
四旋翼建模
运动方程简写形式
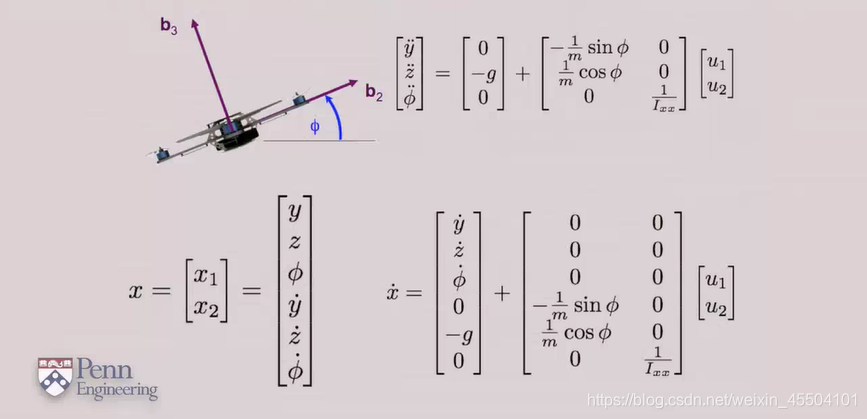
运动学方程式个非线性的
要想悬停,u1输入升力=重力,u2=0
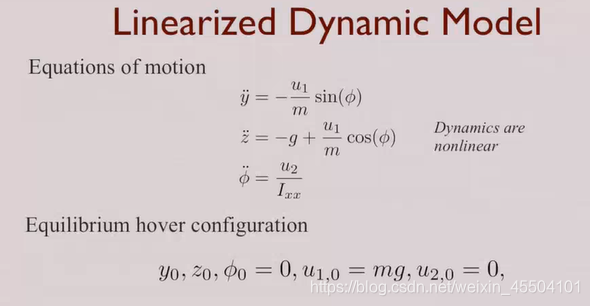
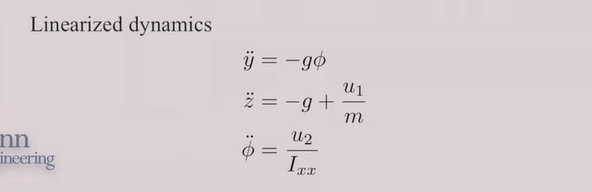
当phi趋近于0,则cosphi=1,sinphi≈phi,近似线性化
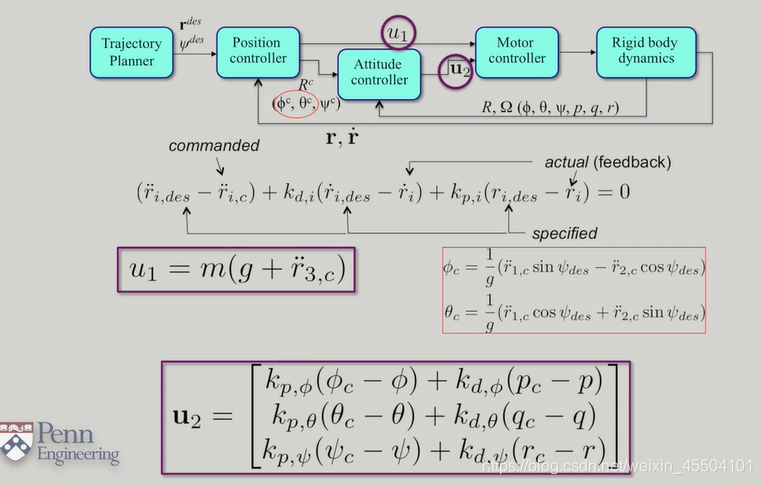
控制结构
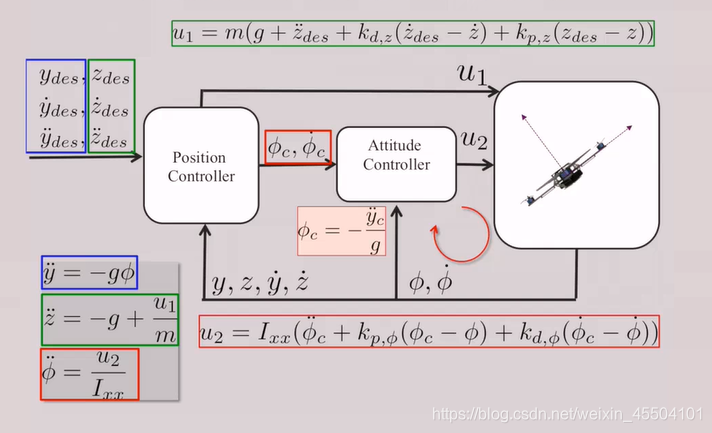
综合得到三个控制方程
y-z平面,z的位置决定输入u2
y的位置决定phi决定u1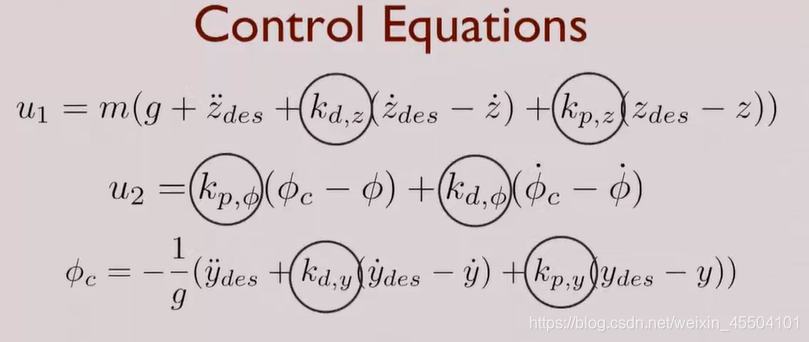
3-D模型
assignment2
这次还是写pd,只不过是两个输入u1、u2,2-D模型,调参比较麻烦,一共6个参数
是能够按照既定策略飞行,直线和sin形
最后输出结果如下
按照直线飞行
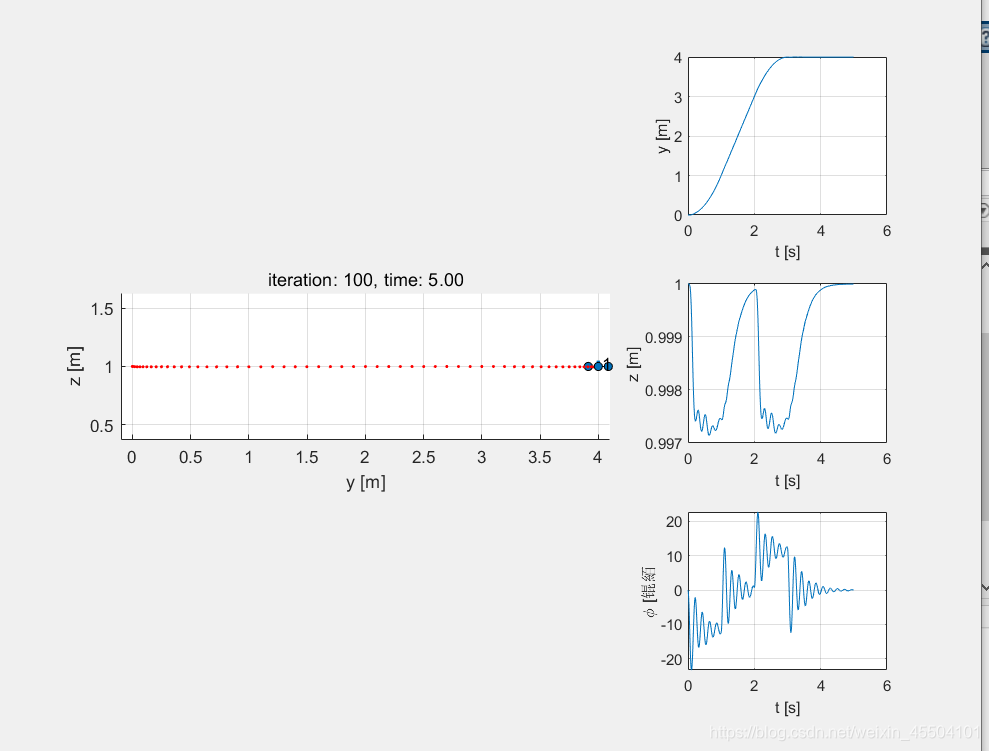
左边是飞行路线,右边是y-z-phi实时变化
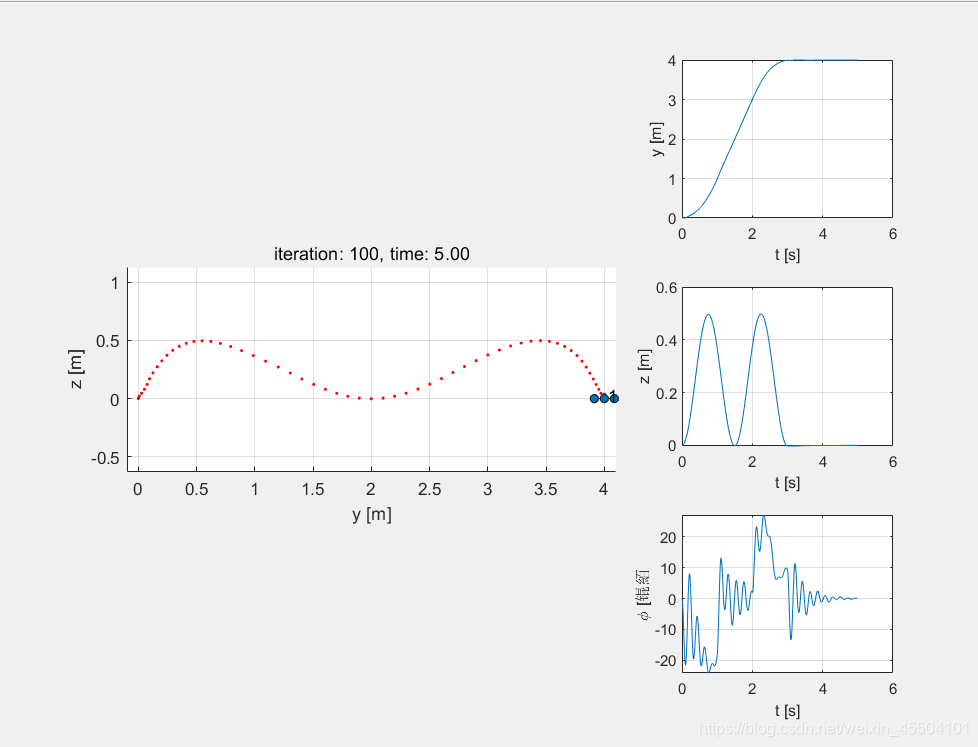
sin路线飞行
lesson2
3维移动策略
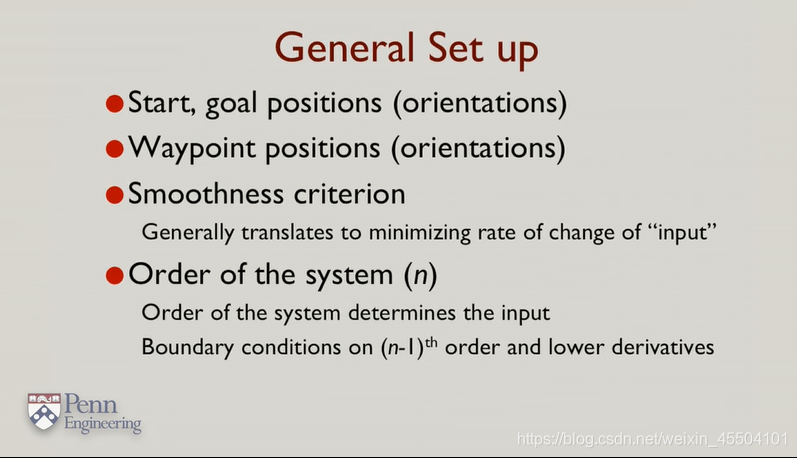
讨论三阶
接下来讲三次样条曲线我也没看懂
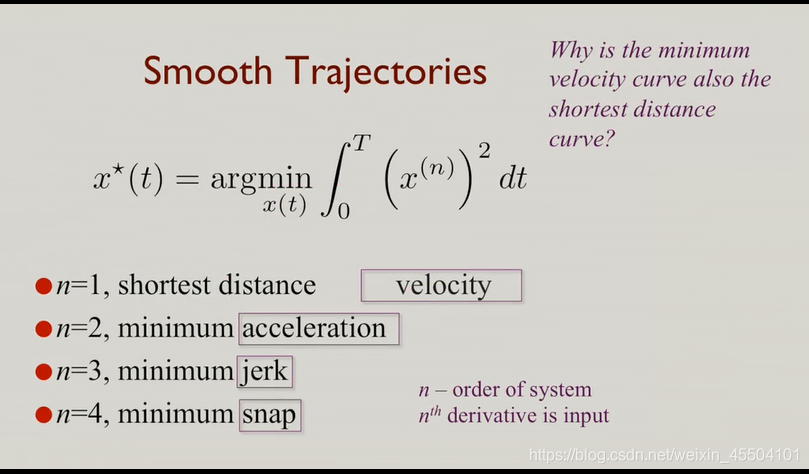
大概是为了得到平滑连续曲线
避障

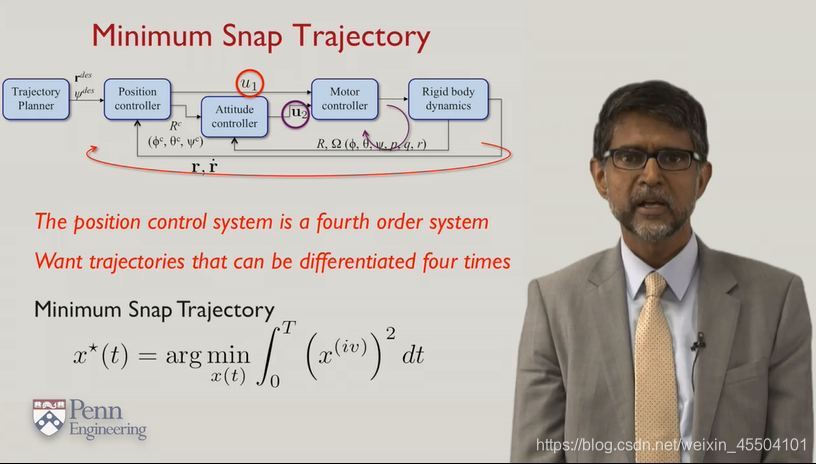
snap trajectories用于避障
supplementary
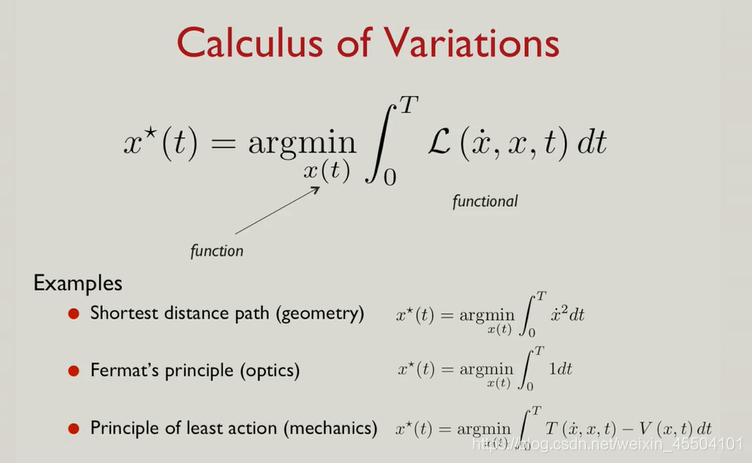
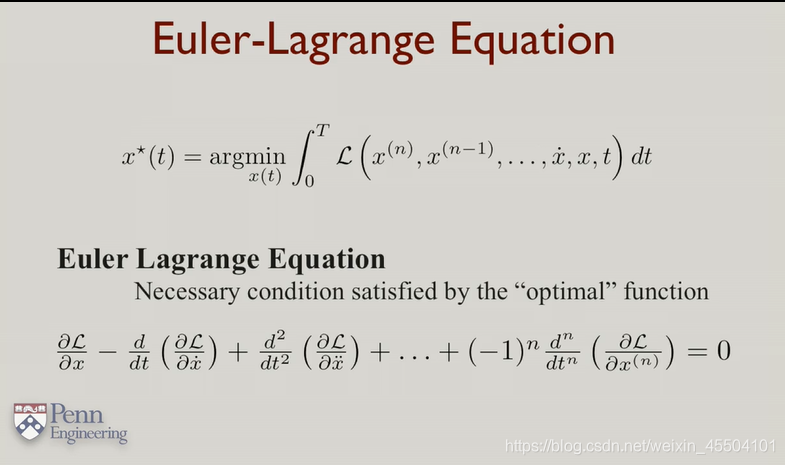
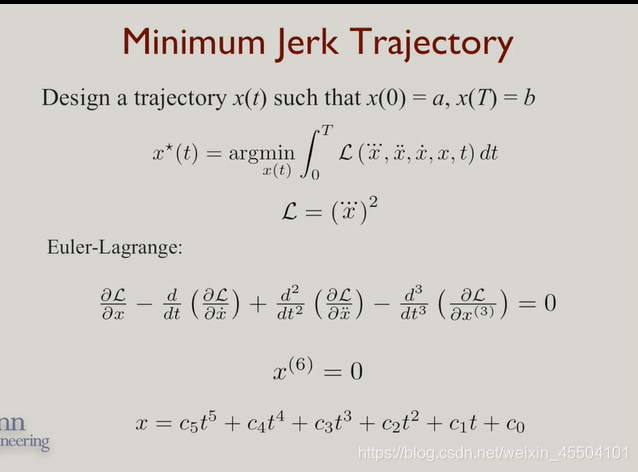
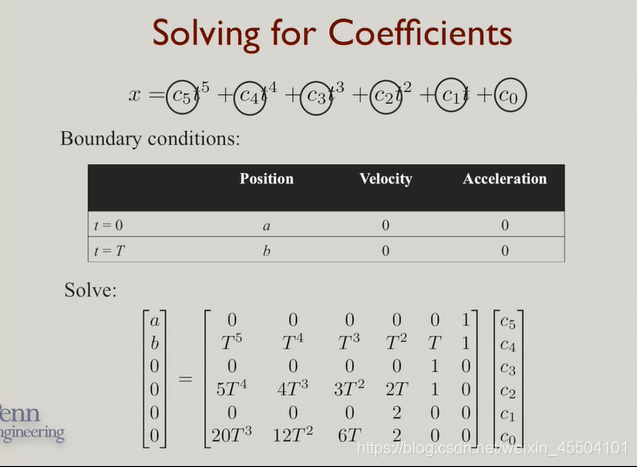
minimum-jerk-trajectories的求解
解释了minimum-velocity-trajectories
四旋翼方程的线性化:theta和phi趋近于0














 4592
4592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









