







bricks.ini配置文件:
-
如果是单独的TP软件包直接访问根目录,打开TP(虚拟示教器)软件根目录,找到bricks.ini配置文件。
-
如果电脑端安装了Estun Editor,在C盘下的runtime文件夹下有一个TP-for-pc文件夹,该文件夹就是TP(虚拟示教器)软件,在TP-for-pc文件夹下,找到bricks.ini配置文件。
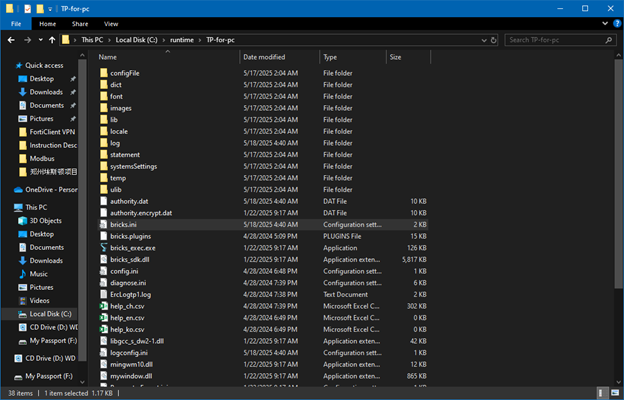
图1 bricks.ini配置文件目录
配置IP:
-
打开bricks.ini配置文件,修改INTIMEIP项的IP地址,和机器人控制器 LAN3 IP地址保持在同一个网段。
-
LAN3默认地址:192.168.60.68;LAN4默认地址:192.168.60.63。
-
如果不清楚机器人控制器IP地址,可以使用MobaXterm、CMD命令等扫描出机器人控制器的IP地址信息,这里不再赘述。
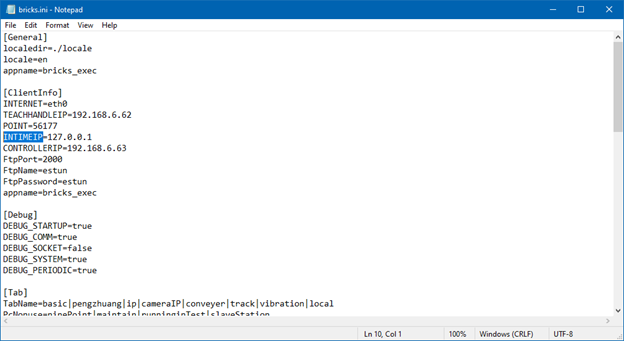
图2 修改INTIMEIP项的IP地址
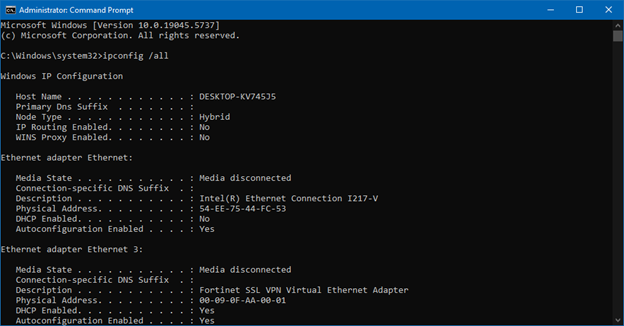
图3-1 使用cmd命令查询机器人控制器IP网段
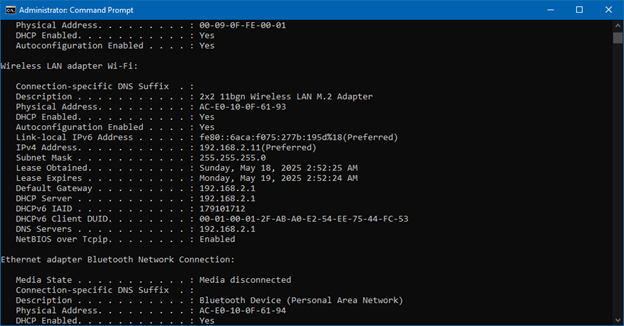
图3-2 使用cmd命令查询机器人控制器IP网段
连接机器人控制器:
-
配置好bricks.ini配置文件的INTIMEIP项IP地址后,打开bricks_exec.exe可执行文件,即可连接控制机器人实体控制器。

图4 Estun 虚拟示教器


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









