







 本文详细介绍了KUKA机器人在配置姿态时需要考虑的状态和转角因素,以及如何处理奇异点问题。状态包括手轴交点、轴A3和A5的位置,转角则规定轴角度的正负号。机器人有三种奇点位置:过顶奇点、延展位置奇点和手轴奇点,在这些位置,笛卡尔坐标转换为轴坐标值时会出现不确定性或导致大幅度的轴角变化。针对奇点,机器人控制系统通过系统变量进行响应,以避免不必要或无法确定的轴角度。
本文详细介绍了KUKA机器人在配置姿态时需要考虑的状态和转角因素,以及如何处理奇异点问题。状态包括手轴交点、轴A3和A5的位置,转角则规定轴角度的正负号。机器人有三种奇点位置:过顶奇点、延展位置奇点和手轴奇点,在这些位置,笛卡尔坐标转换为轴坐标值时会出现不确定性或导致大幅度的轴角变化。针对奇点,机器人控制系统通过系统变量进行响应,以避免不必要或无法确定的轴角度。
| 修订 |
姓名 |
日期 |
备注 |
| 编制 |
杨帅峰 |
2024/04/30 |
|
| 审核 |
|||
| 批准 |
| 版本 |
更新 |
姓名 |
日期 |
| V1.0 |
初次发布 |
杨帅峰 |
2024/04/30 |
状态和转角
TCP 的位置 (X, Y, Z) 和姿态 (A, B, C) 不足以明确地确定机器人的轴角度。 此外,为此还需要状态和转角。这是因为机器人实际运动中要把笛卡尔和欧拉角转换成6个轴的关节角,使用关节角进行直线插补或者回转运动。六轴机器人运动学求逆解有8组解,状态和转角用来配置机器人使用具体的一组解来运动到指定位置。
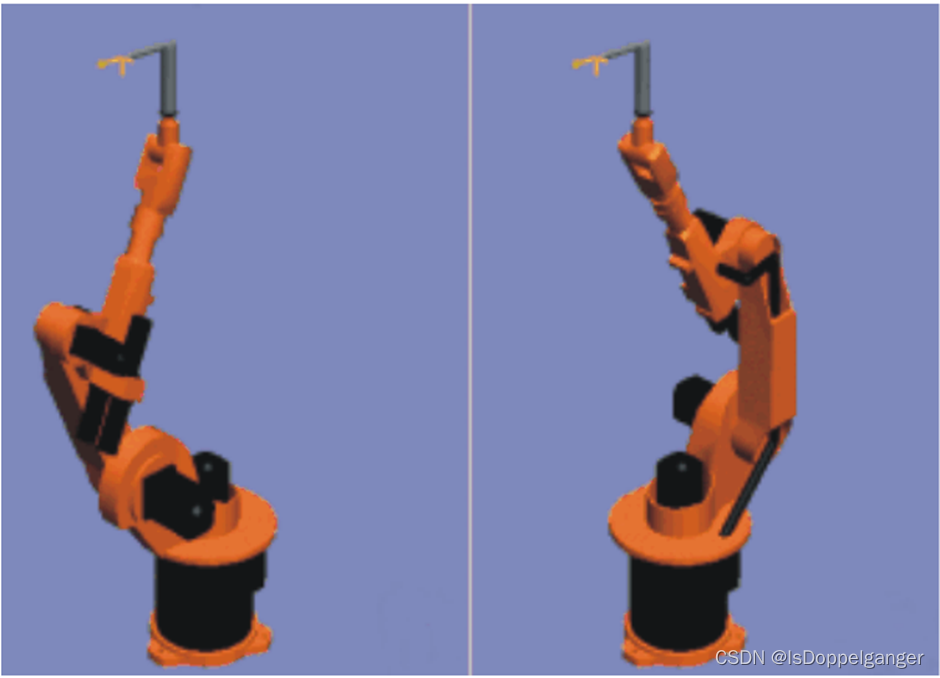 例如: TCP 相同,轴位置不同
例如: TCP 相同,轴位置不同
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1547
1547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









