









**
I2c协议(Inter-Integrated Circuit)
**
1、I2C简介
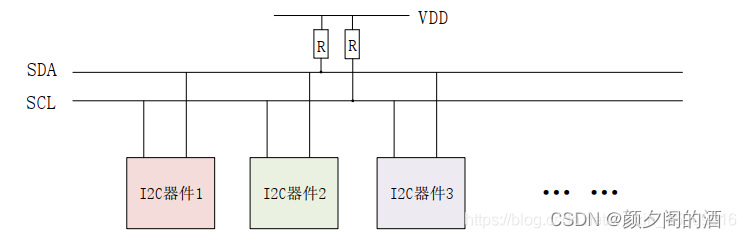
I2C 是一种串行通信总线,用于连接微控制器及其外围设备,实现主控制器和从器件间的主从双向通信,是一种同步半双工通信(两端时钟频率一致,双向通信,但不能同时进行数据收发)。
I2C是 NXP 公司设计的, I2C 使用两条线在主控制器和从机之间进行数据通信。一条是 SCL(串行时钟线),另外一条是 SDA(串行数据线),这两条数据线需要接上拉电阻,一般为4.7k,总线空闲的时候 SCL 和 SDA 处于高电平。
2.I2C协议
I2C 是支持多从机的,也就是一个 I2C 控制器下可以挂多个 I2C 从设备,为确保传输过程的指向准确性,每个接到I2C总线上的器件都有唯一的地址(7位从器件专用地址码),可实现制定从机的定向传输与群发传输。
3.I2C协议标准代码
3.1 起止信号
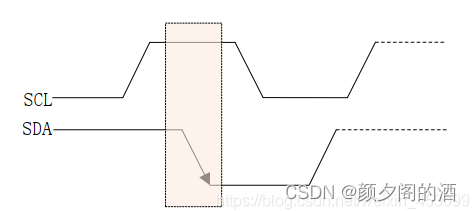
起始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
void I2C_Start(void)
{
I2C_SCL_High(); //SCL=1
I2C_SDA_High(); //SDA=1
I2C_Delay();
I2C_SDA_Low();
I2C_Delay();
}
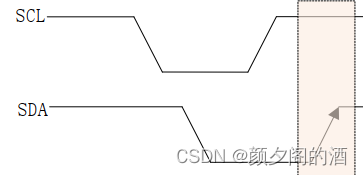
停止信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。
void I2C_Stop(void)
{
I2C_SCL_High(); //SCL=1
I2C_SDA_Low();//SDA=0;
I2C_Delay();
I2C_SDA_High();
I2C_Delay();
}
3.2 数据传输
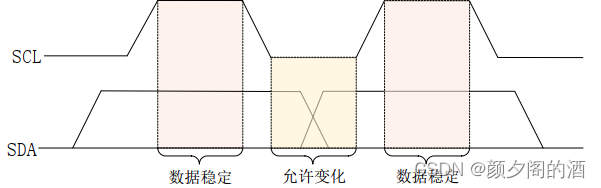
I2C 总线在数据传输的时候要保证在 SCL 高电平期间, SDA 上的数据稳定,因此 SDA 上的数据变化只能在 SCL 低电平期间发生,如下图所示:
CPU向I2C总线设备发送一个字节(8bit)数据:
cu8 I2C_SendByte(uint8_t Byte)
{
uint8_t i;
/* 先发送高位字节 */
for(i = 0 ; i < 8 ; i++)
{
if(Byte & 0x80)
{
I2C_SDA_High();
}
else
{
I2C_SDA_Low();
}
I2C_Delay();
I2C_SCL_High();
I2C_Delay();
I2C_SCL_Low();
I2C_Delay();
if(i == 7)
{
I2C_SDA_High(); /* 释放SDA总线 */
}
Byte <<= 1; /* 左移一位 */
I2C_Delay();
}
}
CPU从I2C总线设备上读取一个字节(8bit数据):
u8 I2C_ReadByte(void)
{
uint8_t i;
uint8_t value;
/* 先读取最高位即bit7 */
value = 0;
for(i = 0 ; i < 8 ; i++)
{
value <<= 1;
I2C_SCL_High();
I2C_Delay();
if(I2C_SDA_READ())
{
value++;
}
I2C_SCL_Low();
I2C_Delay();
}
return value;
}
3.3应答信号
IIC 总线协议规定,每传送一个字节数据后(8bit),都要有一个应答信号以确定数据传送是否被对方收到。即一个字节传输的8个时钟过后的第9个时钟期间,接收器必须回一个ACK应答信号给发送器,这样才能进行数据传输。
应答信号由接受设备产生,在SCL为高电平期间,接受设备将SDA拉低为低电平,表示数据传输正确,产生应答(ACK),SDA拉高则表示数据传输失败,产生非应答位(NACK)
(1)CPU产生一个ACK信号
void I2C_Ack(void)
{
I2C_SDA_Low();
I2C_Delay();
I2C_SCL_High();
I2C_Delay();
I2C_SCL_Low();
I2C_Delay();
I2C_SDA_High();
}
(2)CPU产生一个非ACK信号
void I2C_NoAck(void)
{
I2C_SDA_High();
I2C_Delay();
I2C_SCL_High();
I2C_Delay();
I2C_SCL_Low();
I2C_Delay();
}
(3)CPU产生一个时钟,并读取器件的ACK应答信号
uint8_t I2C_WaitToAck(void)
{
uint8_t redata;
I2C_SDA_High();
I2C_Delay();
I2C_SCL_High();
I2C_Delay();
if(I2C_SDA_READ())
{
redata = 1;
}
else
{
redata = 0;
}
I2C_SCL_Low();
I2C_Delay();
return redata;
}
4.I2C通信时序图解析
I2C总线进行数据传送时,SCL时钟信号为高电平期间,SDA数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。 当一个字节按数据位从高位到低位的顺序传输完后,紧接着从机将拉低SDA线,回传给主设备一个应答位ACK, 此时才认为一个字节真正的被传输完成 ,如果一段时间内没有收到从机的应答信号,则自动认为从机已正确接收到数据。
4.1 I2C写时序
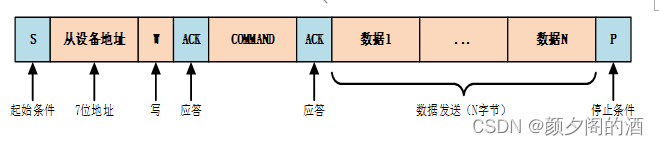
结合I2C总线协议的知识,我们可以知道触摸屏驱动的I2C写数据由一下10个步骤组成。
第一步,发送一个起始信号。
第二步,发送7bit从机地址,即TP的地址。此处需要注意,发送数据时,无法发送7bit数据,此处发送了7bit地址+1bit读写选择位,即发送7bit+r/w。最低位为1表示读,为0表示写。
第三步,产生一个ACK应答信号,此应答信号为从机器件产生的应答。
第四步,发送寄存器地址,8bit数据。
第五步,产生一个ACK应答信号,此应答信号为从机器件产生的应答。
第六步,发送一个数据,8bit数据。
第七步,产生一个ACK应答信号,此应答信号为从机器件产生的应答信号。
第八步,发送一个CRC校验码,此CRC校验值为2、4、6步数据产生的校验码。
第九步,既可以发送一个应答信号,也可以发送一个无应答信号,均有从机器件产生。
第十步,发送一个停止信号。
接下来,按照以上是个步骤,可以写出TP驱动的i2c写数据的函数。代码如下:
u8 I2C_WriteBytes(void)
{
I2C_Start(); //1
I2C_SendByte(Slaver_Addr | 0); //2
I2C_WaitToAck(); //3
I2C_SendByte(Reg_Addr); //4
I2C_WaitToAck(); //5
I2C_SendByte(data); //6
I2C_WaitToAck(); //7
I2C_SendByte(crc); //8
I2C_WaitToAck(); //9
I2C_Stop(); //10
}
4.2 I2C读时序
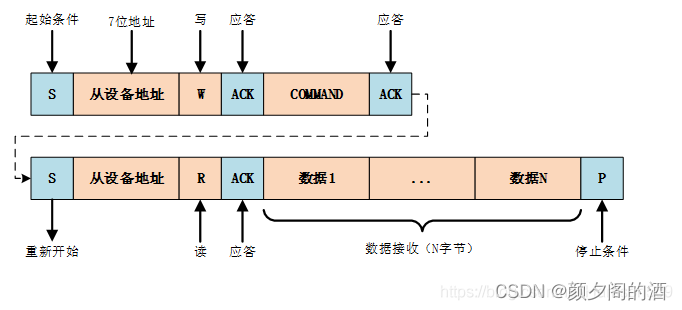
通过分解后的时序图,可以看到触摸屏驱动的读数据由以下13个步骤组成。
第一步,发送一个起始信号。
第二步,发送7bit从机地址,即驱动的地址。此处需要注意,发送数据时,无法发送7bit数据,此处发送了7bit地址+1bit读写选择位,即发送7bit+r/w。最低位为1表示读,为0表示写。
第三步,产生一个ACK应答信号,此应答信号为从机器件产生的应答。
第四步,发送寄存器地址。
第五步,产生一个ACK应答信号,此应答信号为从机器件产生的应答。
第六步,再次发送一个骑士信号。
第七步,发送7bit从机地址,即驱动的地址。此处需要注意,发送数据时,无法发送7bit数据,此处发送了7bit地址+1bit读写选择位,即发送7bit+r/w。最低位为1表示读,为0表示写。
第八步,产生一个ACK应答信号,此应答信号为从机器件产生的应答。
第九步,读取一个字节(8bit)的数据。
第十步,产生一个ACK应答信号,此应答信号为CPU产生。
第十一步,读取一个CRC校验码。
第十二步,产生一个NACK信号。此无应答信号由CPU产生。
第十三步,产生一个停止信号。
接下来,由以上分析步骤,可以写出驱动的I2C读数据代码。如下所示:
u8 I2C_ReadBytes(void)
{
u8 data;
u8 crc;
I2C_Start(); //1
I2C_SendByte(Slaver_Addr | 0); //2
I2C_WaitToAck(); //3
I2C_SendByte(Reg_Addr); //4
I2C_WaitToAck(); //5
I2C_Start(); //6
I2C_SendByte(Slaver_Addr | 1); //7 1-读
I2C_WaitToAck(); //8
data=I2C_ReadByte(); //9
I2C_Ack(); //10
crc=I2C_ReadByte(); //11
I2C_NoAck(); //12
I2C_Stop(); //13
}














 1087
1087











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









