






偷偷拿来记录一下萌新的cs路——day8 Matlab仿真numerical solution for point to point control(综合性太强了,研究两个小时还没有完全弄明白,先记录下来代码
背景和参数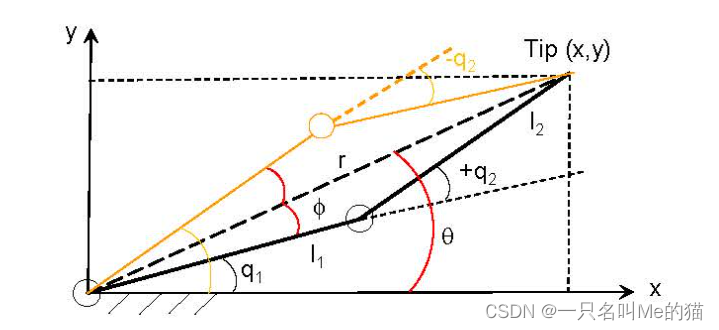
对终位置坐标进行泰勒展开
% numerical solution for point to point control
clear
% robot link lengths
l1 = 2; l2 = 1.5;
% input initial position
x0 = 1; y0 = 1;
% input final position
xf = 2; yf = 2;
% solve the initial joint angles (closed form) 简单计算 见原理图
q2 = acos((x0^2+y0^2-l1^2-l2^2)/(2*l1*l2));
theta = atan2(y0,x0); % 四象限反正切 若theta = tan(x0,y0)则无正负仅输出角度绝对值
phi = asin(l2*sin(pi-q2)/sqrt(x0^2+y0^2));
%phi = acos((x0^2+y0^2+l1^2-l2^2)/(2*l1*sqrt(x0^2+y0^2)));
%q1 = theta-phi; % solution 1
q1 = theta+phi; % solution 2
q2 = -q2;
q10 = q1; q20 = q2;
% plot
pp(1,:) = [0,0];
pp(2,:) = [l1*cos(q1),l1*sin(q1)];
pp(3,:) = [l2*cos(q1+q2),l2*sin(q1+q2)];
pp(3,:) = pp(2,:) + pp(3,:);
plot(pp(:,1),pp(:,2),'ob-'); % 画两条黑线
axis([-1,3,-1,3]);
grid on % 网格线
hold on
% define initial angles
q = [q10,q20]'; % 定义矩阵-初始角度
% define initial tip error
p0 = [x0,y0]'; % 【】‘:转置矩阵
pf = [xf,yf]';
delp = pf-p0;
% define threshold 越高,越精确
%er = 10e-1;
%er = 10e-2;
er = 10e-3;
% counter for iteration 计数器
k = 0;
% solve the final joint angles
while norm(delp,2) > er % 返回delp最大奇异值
% calculate Jacobian
ja(1,1) = -l1*sin(q(1))-l2*sin(q(1)+q(2));
ja(1,2) = -l2*sin(q(1)+q(2));
ja(2,1) = l1*cos(q(1))+l2*cos(q(1)+q(2));
ja(2,2) = l2*cos(q(1)+q(2));
delq = inv(ja)*delp; % inv:求Jacobian逆矩阵
q = q+delq; % 将Jacobian加到q
% tip position
x = l1*cos(q(1))+l2*cos(q(2)+q(1));
y = l1*sin(q(1))+l2*sin(q(2)+q(1));
p = [x,y]';
delp = pf-p;
k = k+1; %计数器加一
end
%slove the true final joint angles(closed form)
q2 = acos((xf^2+yf^2-l1^2-l2^2)/(2*l1*l2));
theta = atan2(yf,xf);
%phi = asin((l2*sin(pi-q2)/sqrt(xf^2+yf^2)));
phi = acos((xf^2+yf^2+l1^2-l2^2)/(2*l1*sqrt(xf^2+yf^2)));
%q1 = theta-phi; % solution 1
q2 = theta+phi; % solution 2
q2 = -q2;
pp(1,:) = [0,0];
pp(2,:) = [l1*cos(q1),l1*sin(q1)];
pp(3,:) = [l2*cos(q1+q2),l2*sin(q1+q2)];
pp(3,:) = pp(2,:) + pp(3,:);
plot(pp(:,1),pp(:,2),'ok-');
axis([-1,3,-1,3]);
% get the numerical final angles
q1f = q(1); q2f = q(2);
% intermediate points
m = 10; % increments
dq1 = (q1f-q10)/m; % differential
dq2 = (q2f-q20)/m;
for j=1:m % j从1取到m
q1 = q10+j*dq1;
q2 = q20+j*dq2;
pp(1,:) = [0,0];
pp(2,:) = [l1*cos(q1),l1*sin(q1)];
pp(3,:) = [l2*cos(q1+q2),l2*sin(q1+q2)];
pp(3,:) = pp(2,:)+pp(3,:);
pause(0.1)
plot(pp(:,1),pp(:,2),'or-')
axis([-1,3,-1,3]);
end
dd = num2str(norm(delp)); % num2str:数字转化为字符数组
kk = num2str(norm(k));
text(1.7,2.5,'Tip error = '); % text(x,y,txt)坐标系中定位文本
text(2.3,2.5,dd);
text(1.7,2.3,'Iteration = ');
text(2.3,2.3,kk);运行结果: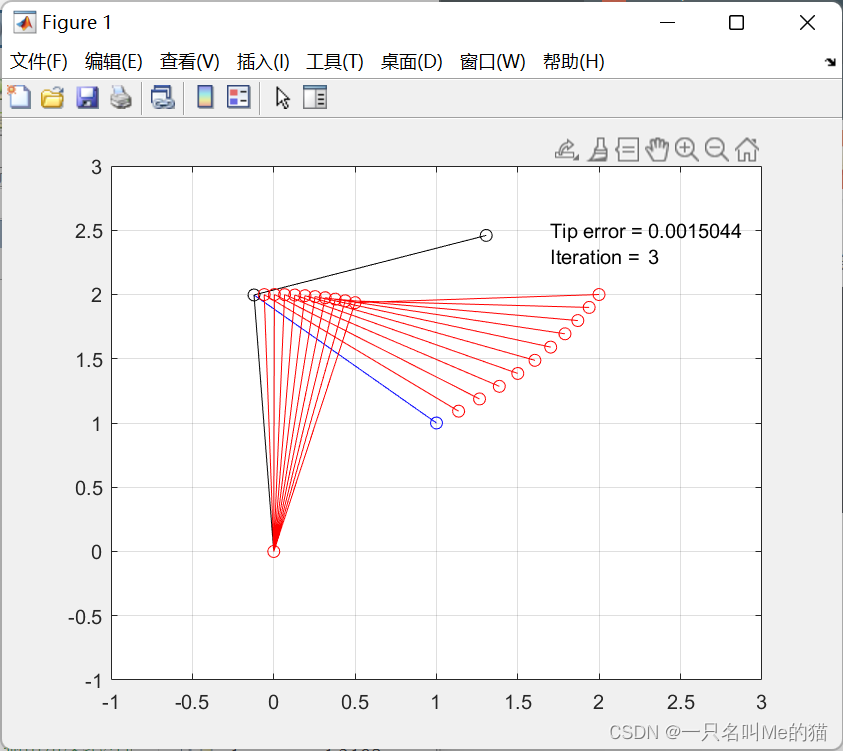 (er=10e-3情况)
(er=10e-3情况)
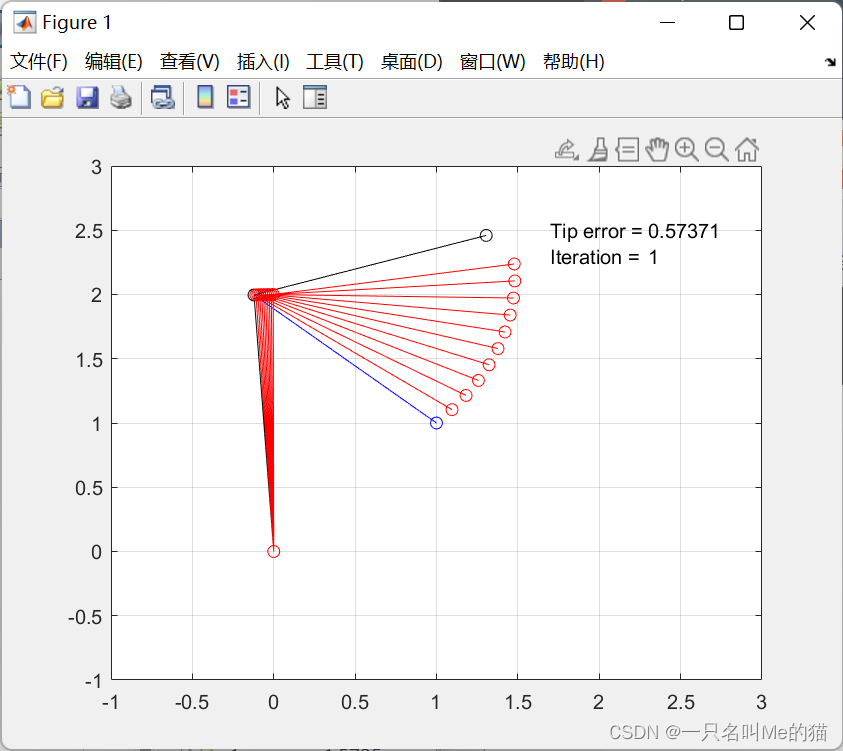 (er=10e-1情况)
(er=10e-1情况)
有一个问题至今没有解决,为什么末端坐标不在(2,2)呢?恳请大佬们帮忙解答
以后学了更多知识还会回来更新的!有误之处恳请大佬们指正,提前感谢!















 2389
2389











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









