






目录
第三章梳理
3.1 FROM ANCIENT CHINA TO ARTHUR CAYLEY
3.2 ADDITION AND TRANSPOSITION
前面都是用矩阵来简单阐述线性系统相关的基本概念,本节将聚焦于矩阵理论。
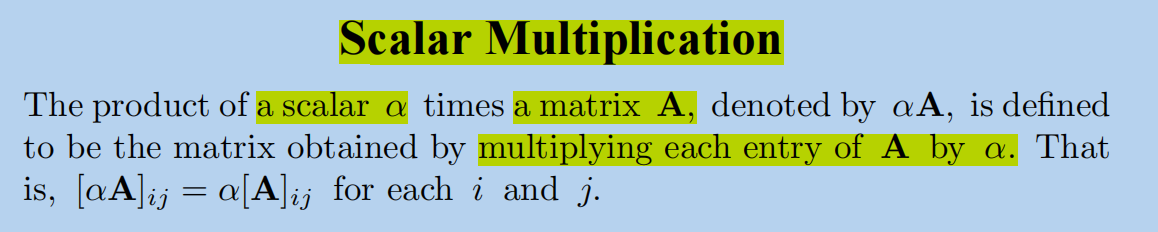
- 标量(scalar)是一个复数
- R will denote the set of real numbers
- C will denote the complex numbers
[!NOTE]
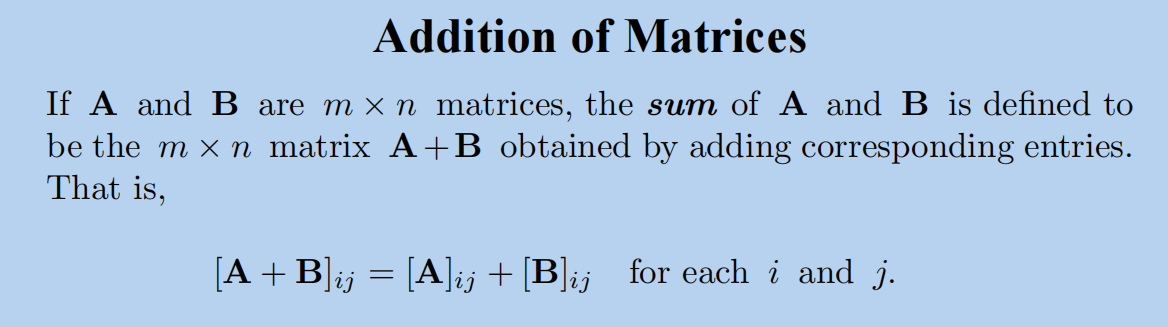
相同形状的矩阵,相加即是对应位置相加的和。
[!NOTE]
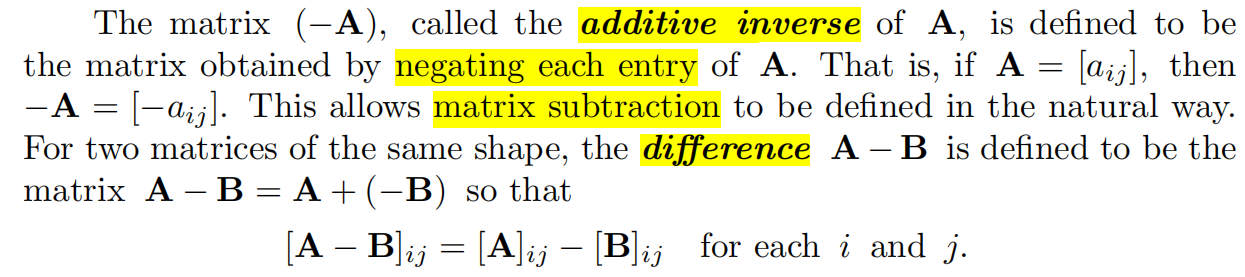
矩阵 − A -\mathbf{A} −A是矩阵 A \mathbf{A} A的加法逆元(additive inverse)
[!NOTE]
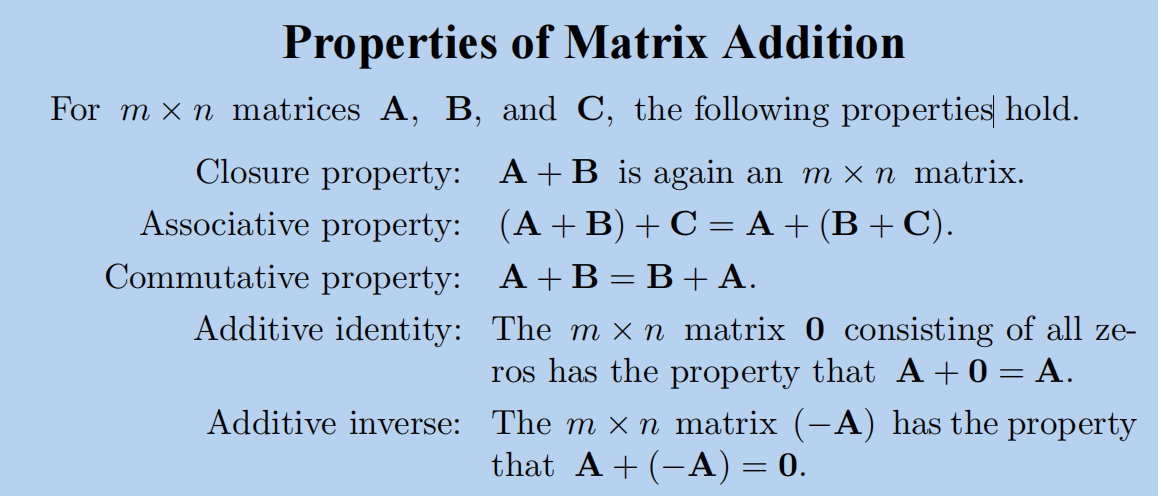
- 闭合性
- 结合律
- 交换律
- 加法单位元
- 加法逆元
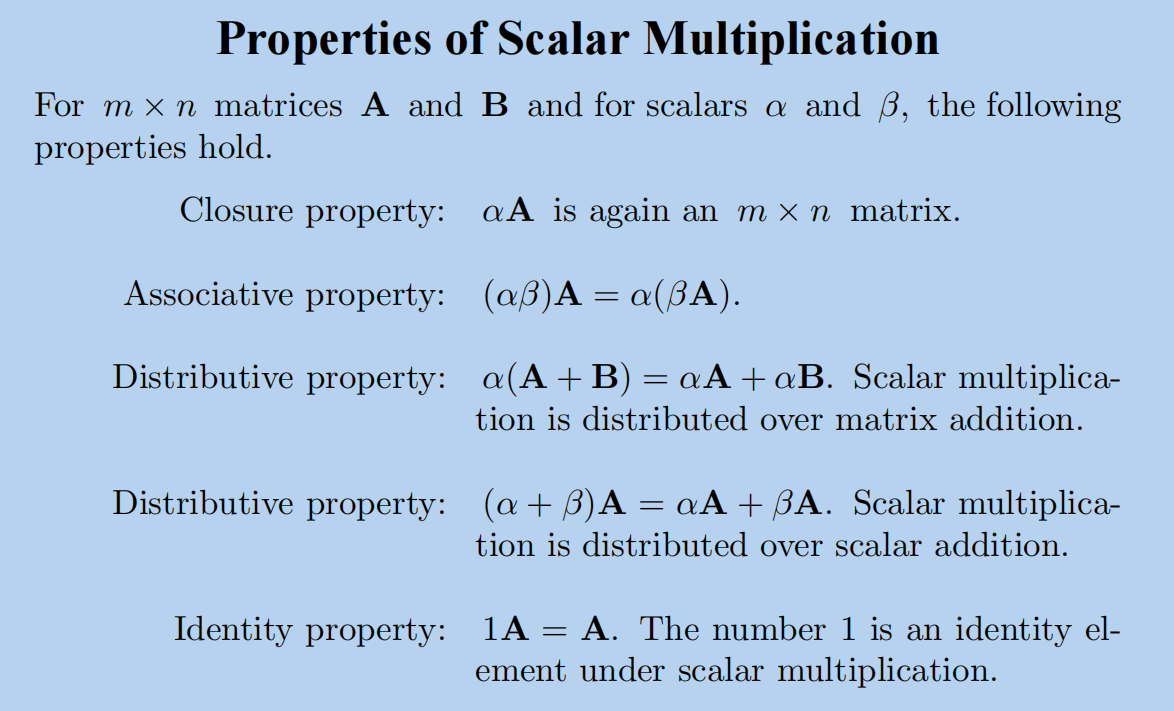
[!NOTE]
- 封闭性
- 结合律
- 矩阵分配律
- 标量分配律
- 单位元性质

[!NOTE]
矩阵 A \mathbf{A} A的转置就是行变列,列变行。
当矩阵包含复数条目的时候,**复共轭(complex conjugation)**几乎总是伴随着转置运算, z = a + i b → z ˉ = a − i b z=a+ib\to\bar{z}=a-ib z=a+ib→zˉ=a−ib
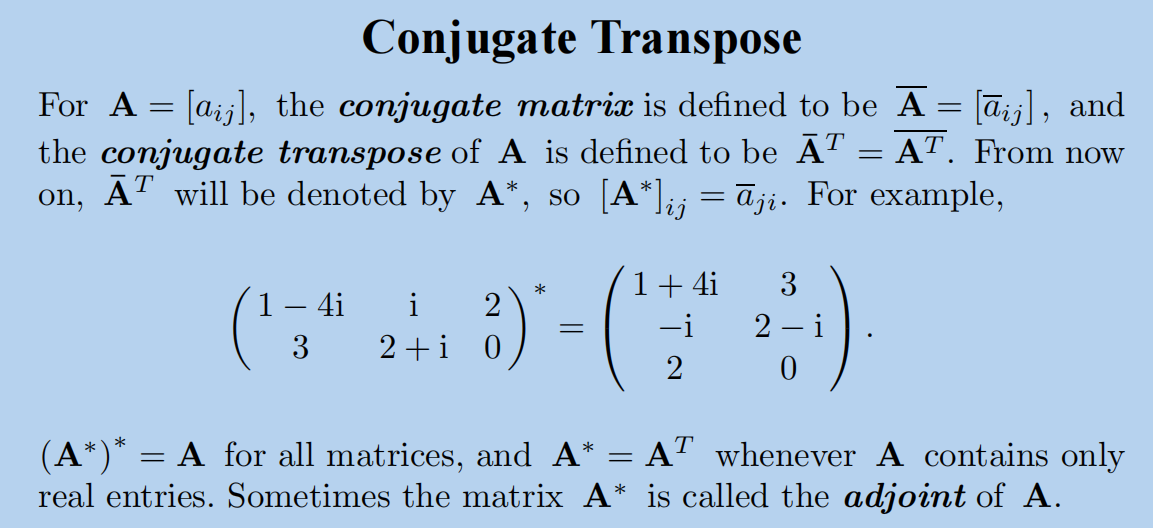
[!NOTE]
矩阵的共轭转置由两部分构成,一部分是共轭,另一部分是转置,此外先转置后共轭和先共轭后转置是相同效果。
[!NOTE]
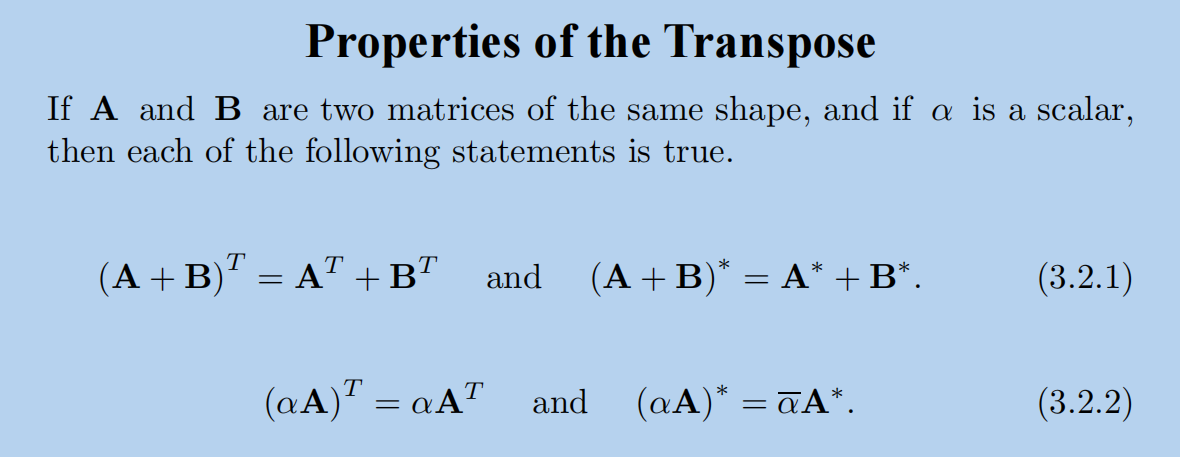
转置的性质如上
[!NOTE]
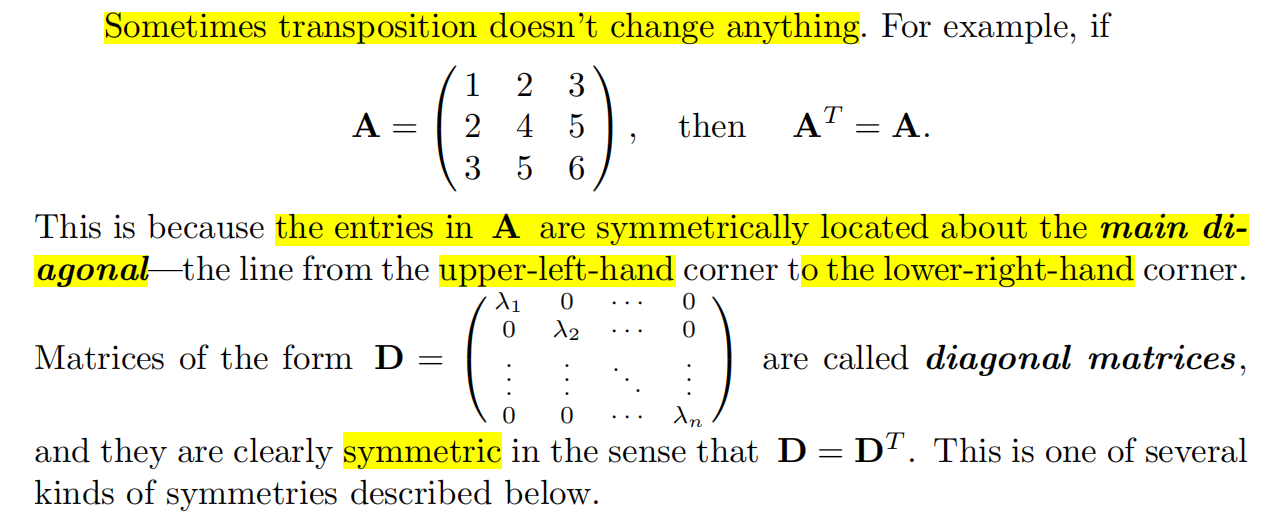
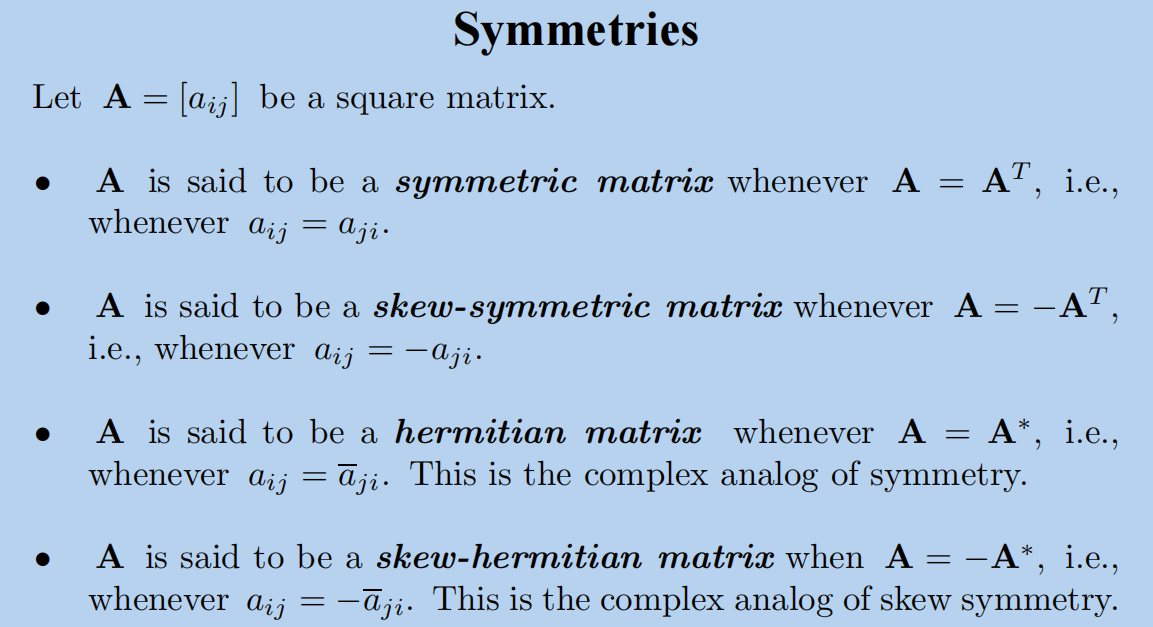
由一个矩阵转置等于矩阵本身来引入矩阵的对称性质。
[!NOTE]
- A \mathbf{A} A是对称矩阵
- A = A T \mathbf{A}=\mathbf{A}^T A=AT
- A \mathbf{A} A是反对称矩阵
- A = − A T \mathbf{A}=-\mathbf{A}^T A=−AT
- A \mathbf{A} A是厄密特矩阵
- A = A ∗ \mathbf{A}=\mathbf{A}^* A=A∗
- A \mathbf{A} A是反厄密特矩阵
- A = − A ∗ \mathbf{A}=-\mathbf{A}^* A=−A∗
3.3 LINEARITY
3.4 WHY DO IT THIS WAY
3.5 MATRIX MULTIPLICATION
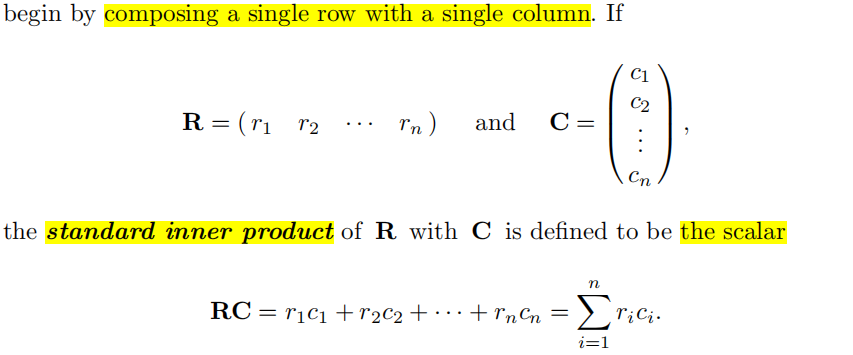
[!NOTE]
单行与单列的乘积。
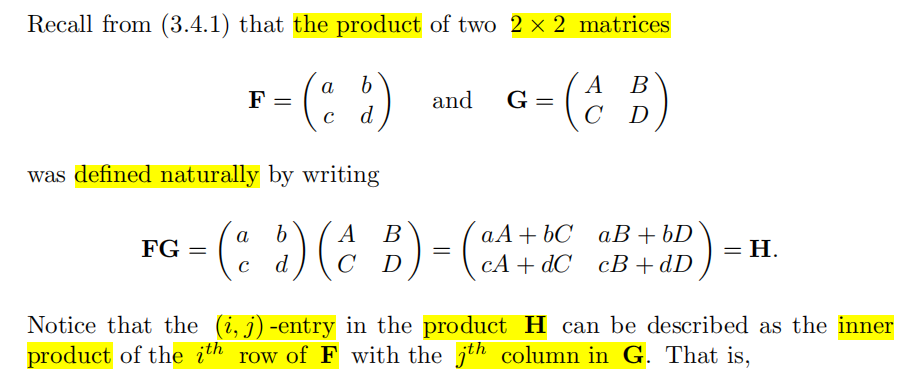
[!NOTE]
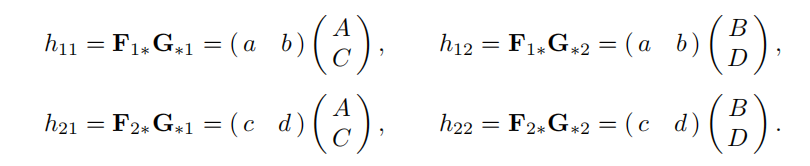
乘积结果 H \mathbf{H} H的(i, j)处为 F \mathbf{F} F的第i行乘 G \mathbf{G} G的第j列。
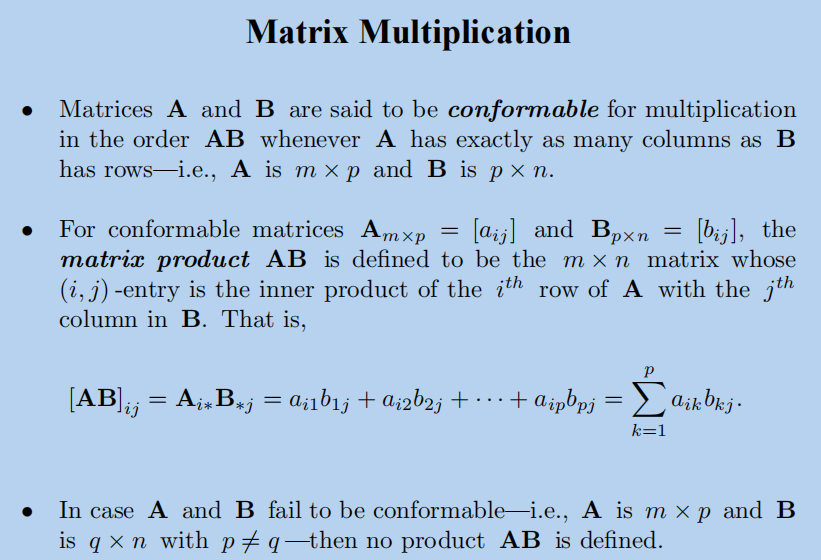


[!NOTE]
标量代数和矩阵代数的主要区别:矩阵相乘是不可交换的
[!NOTE]
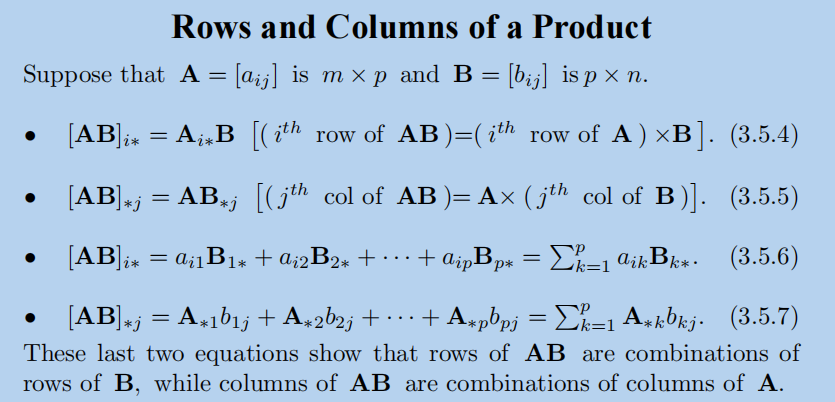
矩阵乘积 A B \mathbf{A}\mathbf{B} AB的行列表示。
矩阵乘积的第i行的两种表示方法:
- [ A B ] i ∗ [AB]_{i*} [AB]i∗= A i ∗ B A_{i*}B Ai∗B
- [ A B ] i ∗ [AB]_{i*} [AB]i∗= a i 1 B 1 ∗ + a i 2 B 2 ∗ + . . . + a i p B p ∗ a_{i1}B_{1*}+a_{i2}B_{2*}+...+a_{ip}B_{p*} ai1B1∗+ai2B2∗+...+aipBp∗= ∑ k = 1 p a i k B k ∗ \sum_{k=1}^{p}a_{ik}B_{k*} ∑k=1paikBk∗
矩阵乘积的第j列的两种表示方法:
- [ A B ] ∗ j [AB]_{*j} [AB]∗j= A B ∗ j AB_{*j} AB∗j
- [ A B ] i ∗ [AB]_{i*} [AB]i∗= A ∗ 1 b 1 j + A ∗ 2 b 2 j + . . . + A ∗ p b p j A_{*1}b_{1j}+A_{*2}b_{2j}+...+A_{*p}b_{pj} A∗1b1j+A∗2b2j+...+A∗pbpj= ∑ k = 1 p A ∗ k b k j \sum_{k=1}^{p}A_{*k}b_{kj} ∑k=1pA∗kbkj
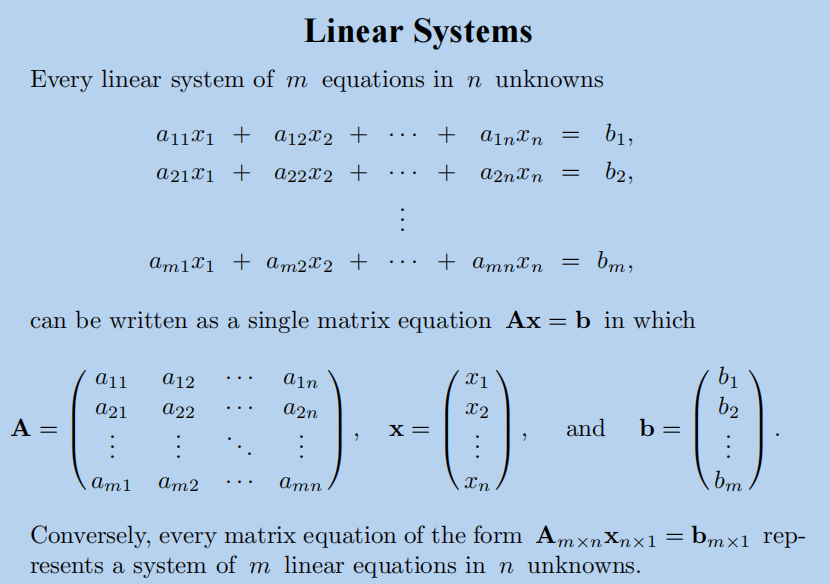
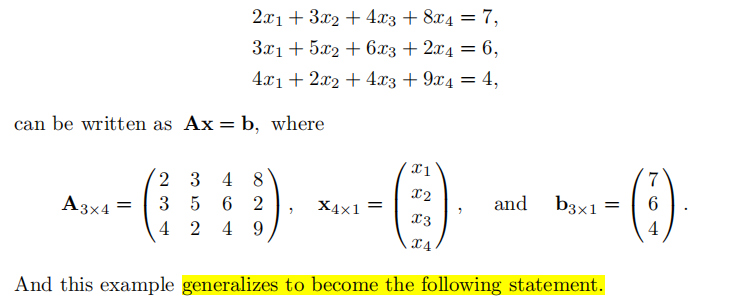
[!NOTE]
可以将线性方程组表示的线性系统用矩阵乘法等式表示
3.6 PROPERTIES OF MATRIX MULTIPLICATION
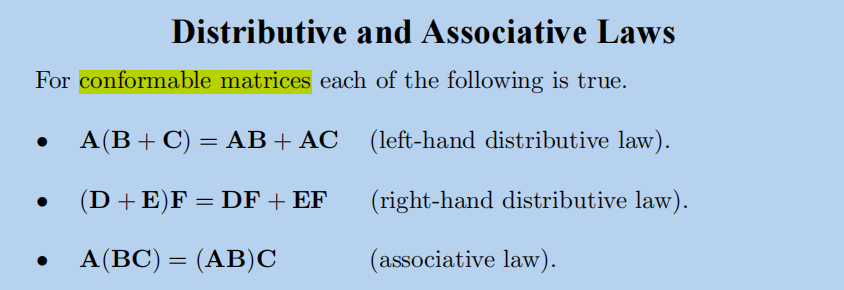
[!NOTE]
矩阵乘法不满足交换律和消去律,但是满足分配律和结合律。
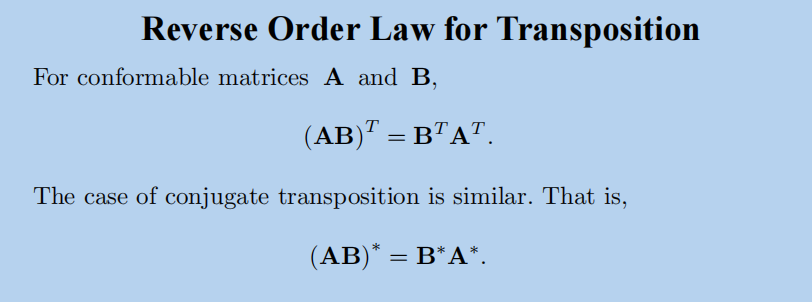
[!NOTE]
矩阵相乘转置的顺序交换律。

[!NOTE]
A T A A^TA ATA和 A A T AA^T AAT都是对称矩阵。
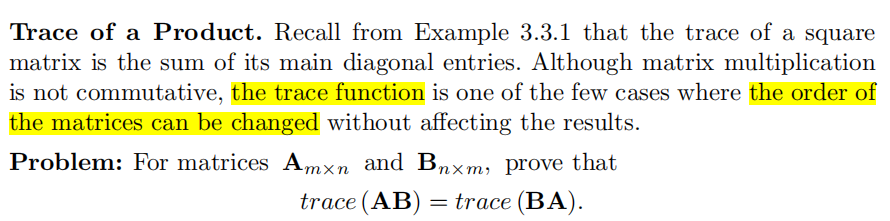

[!NOTE]
矩阵的迹 t r a c e ( ∗ ) trace(*) trace(∗)是为数不多的可以交换矩阵乘积顺序的操作函数。
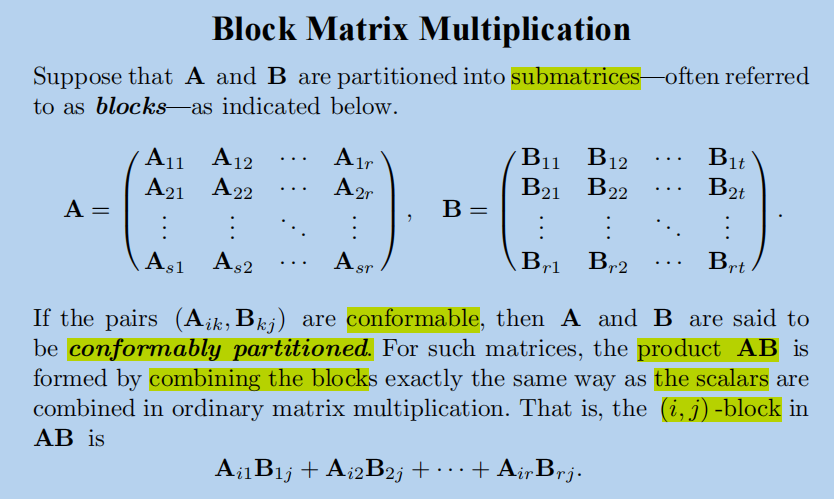
[!NOTE]
矩阵的块乘,只要对应部分是可相乘的,那么就按照正常矩阵乘法组织就行
[!NOTE]
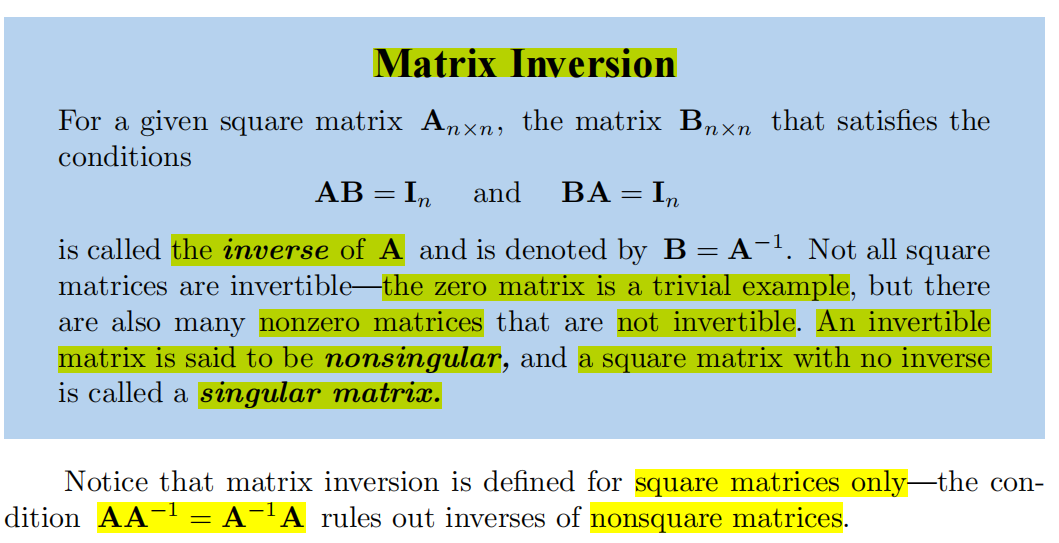
可逆矩阵是非奇异的,不可逆矩阵式奇异矩阵
矩阵可逆仅针对方阵定义,因为 A A − 1 = A − 1 A AA^{-1}=A^{-1}A AA−1=A−1A
[!NOTE]
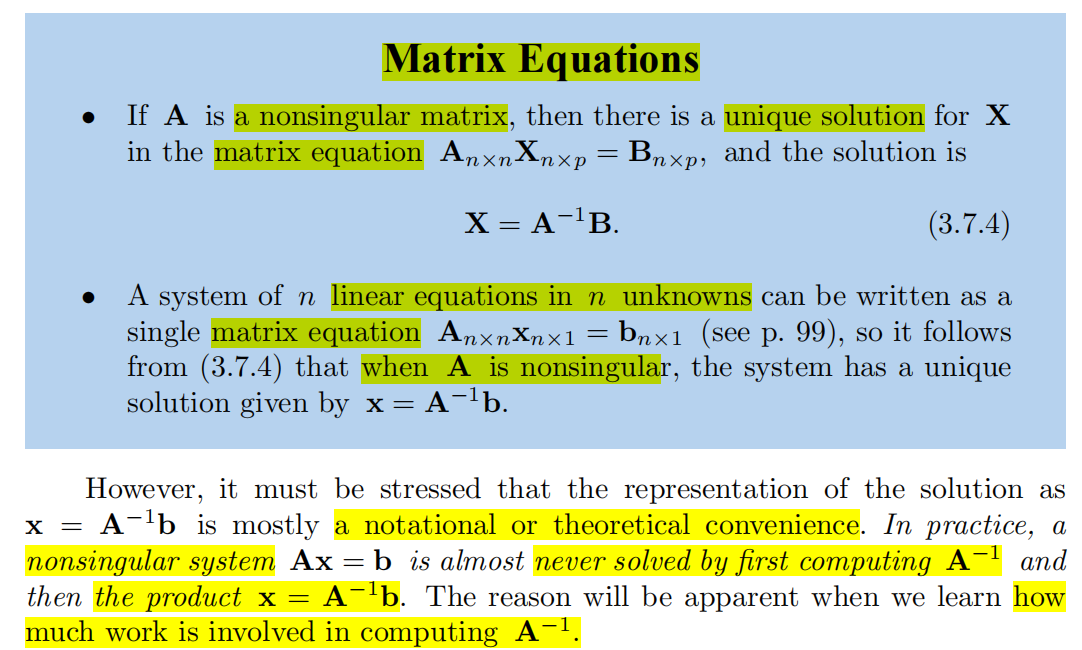
如果A是非奇异的,那么n个变量的线性方程组有唯一解 x = A − 1 b x=A^{-1}b x=A−1b
上述表达更多只是一种表达上的遍历,因为实际情况中不会先求 A − 1 A^{-1} A−1,再求 x = A − 1 b x=A^{-1}b x=A−1b,因为求逆矩阵需要耗费大量资源
3.7 MATRIX INVERSION
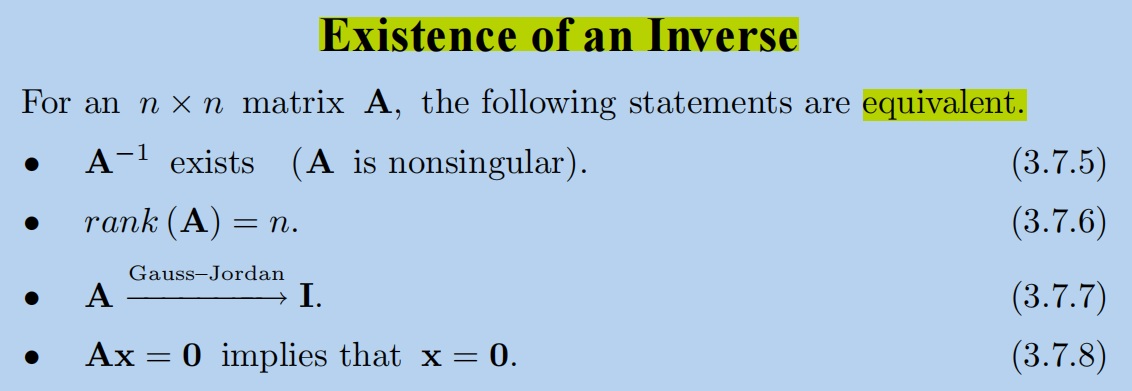
[!NOTE]
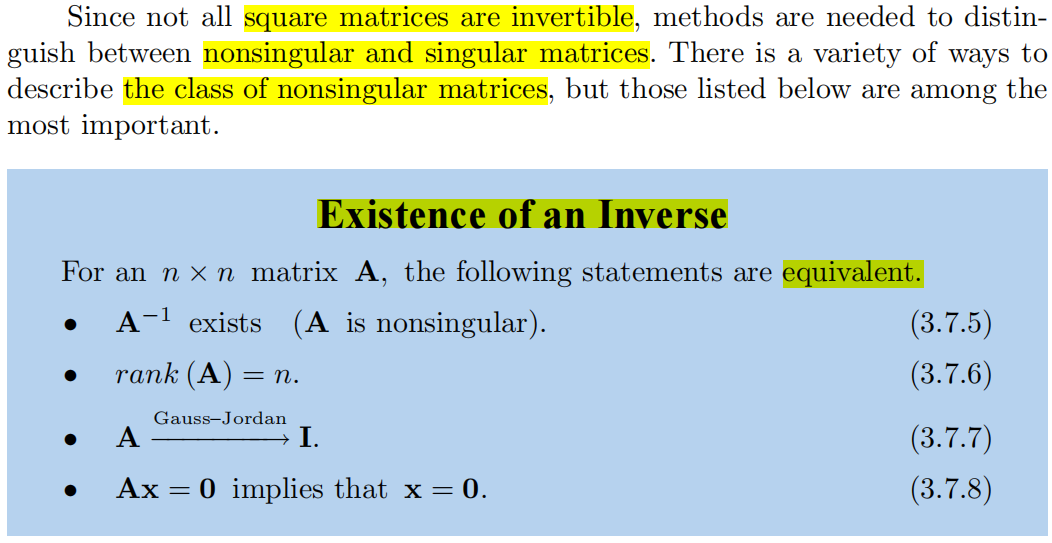
因为不是所有的方阵都可逆,所以需要一些办法来区分可逆矩阵与不可逆矩阵。
- 矩阵A是满秩的
- 矩阵A可以通过Gauss-Jordan法化成单位阵I
- Ax=0 仅有零解


[!NOTE]
AB=I,则AB互逆,很简单的想法
[!NOTE]
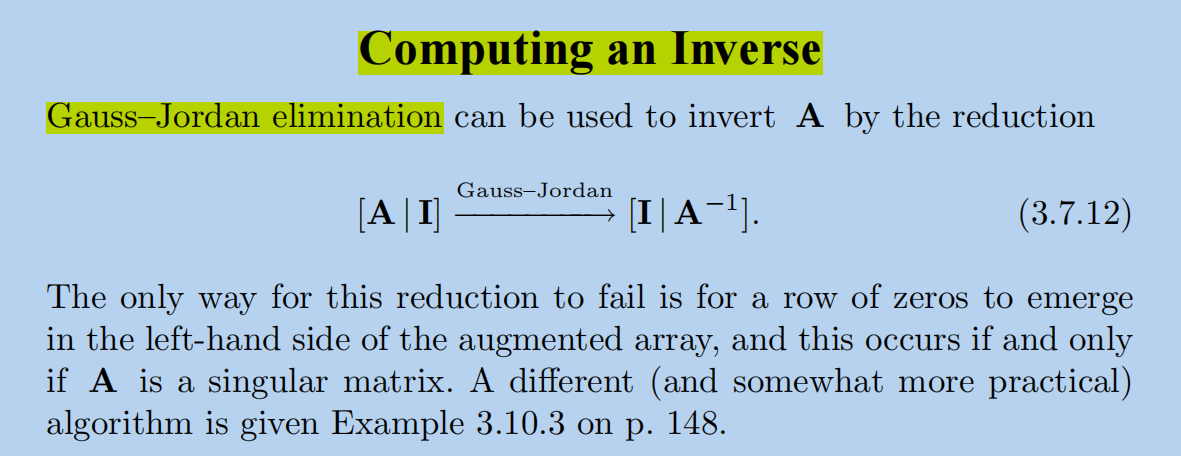
利用高斯-约当法,求逆矩阵,本质上,就是伴随矩阵法.
左边如果有零行,则非满秩,则矩阵A是奇异的
[!NOTE]
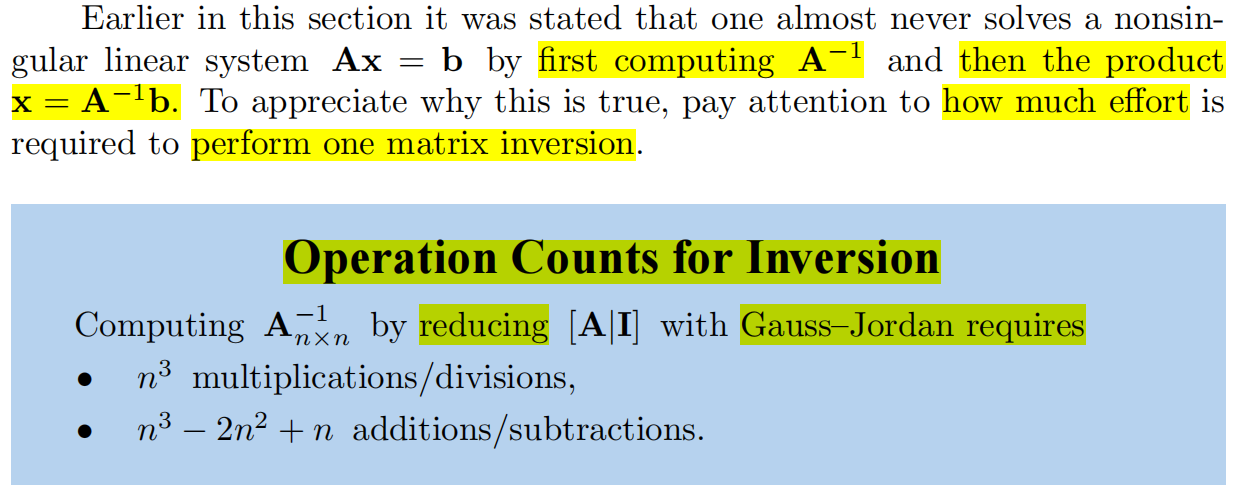
计算一次矩阵的逆,需要消耗大量精力,以高斯消元法求逆矩阵为例:
- n 3 n^3 n3次乘除法
- n 3 − 2 n 2 + n n^3-2n^2+n n3−2n2+n次加减法
[!NOTE]
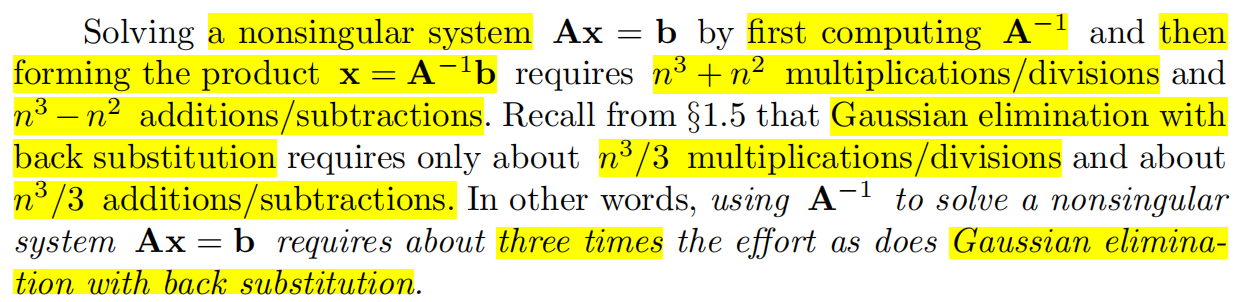
对于系统 A x = b Ax=b Ax=b来如,直接使用高斯消去法就能够以 2 n 3 / 3 2n^3/3 2n3/3求出来x,而先取 A − 1 A^{-1} A−1后求 x x x的话,需要以 2 n 3 2n^3 2n3求出,也就是说,3倍的努力。
[!NOTE]
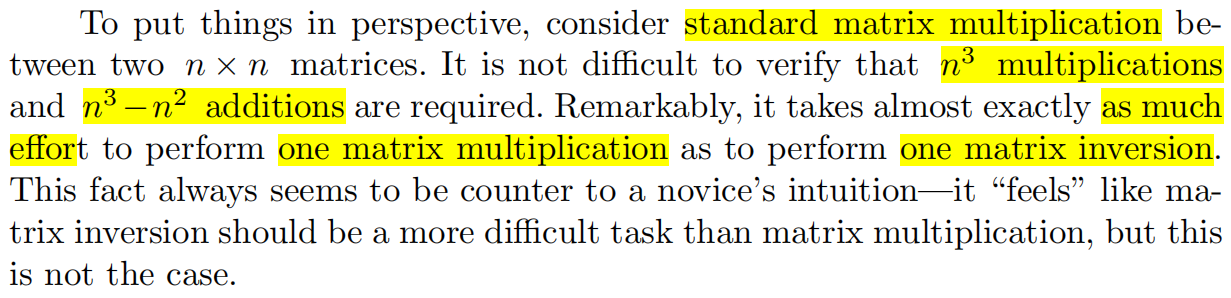
矩阵乘法需要以 2 n 3 − n 2 2n^3-n^2 2n3−n2的算法复杂度,矩阵求逆需要以 2 n 3 2n^3 2n3的算法复杂度。
矩阵乘法与矩阵求逆的算法复杂度很接近,这与直觉相反。
[!NOTE]
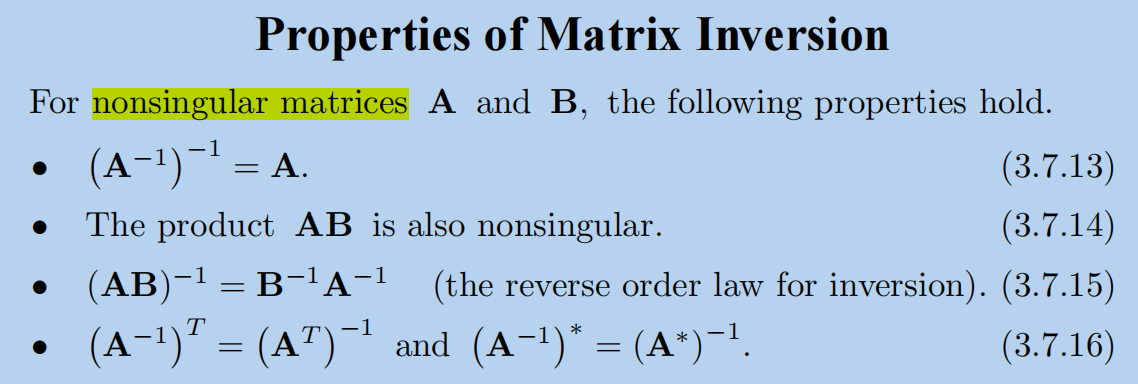
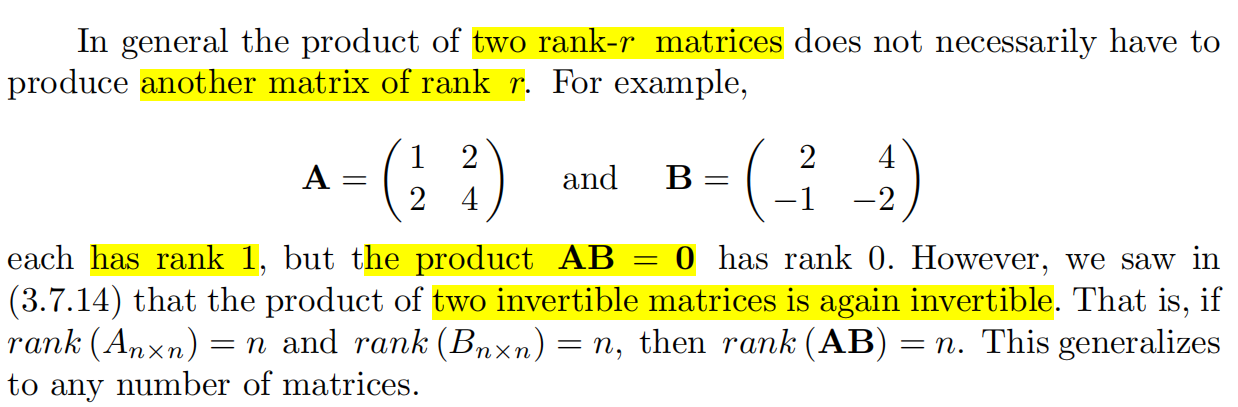
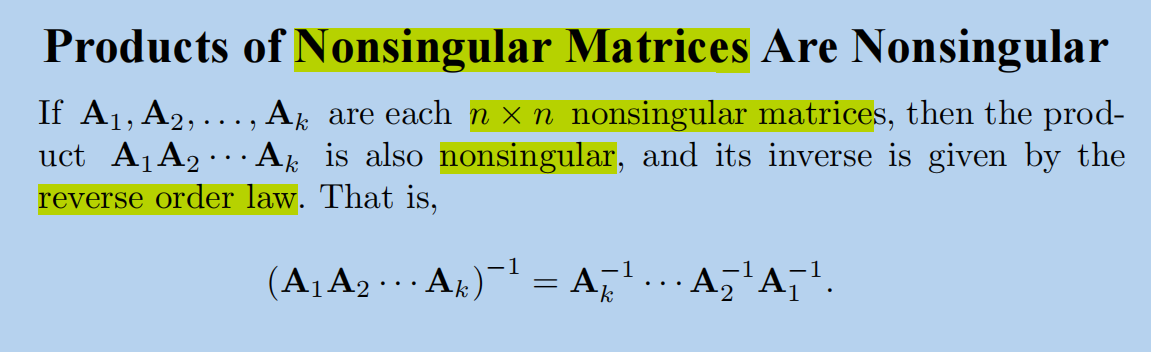
如果A和B都是非奇异的,或者说可逆的话,可知:
- AB也是非奇异的
- ( A − 1 ) T = ( ( A T ) − 1 ) (A^{-1})^T=((A^{T})^-1) (A−1)T=((AT)−1)
- ( A − 1 ) ∗ = ( ( A ∗ ) − 1 ) (A^{-1})^*=((A^{*})^-1) (A−1)∗=((A∗)−1)
- 求逆操作是可以替换顺序的
[!NOTE]
给的例子,AB都是不可逆的,只有AB都可逆了,才成立
[!NOTE]
如果A和B都可逆,那么AB也可逆
3.8 INVERSES OF SUMS AND SENSITIVITY

[!NOTE]
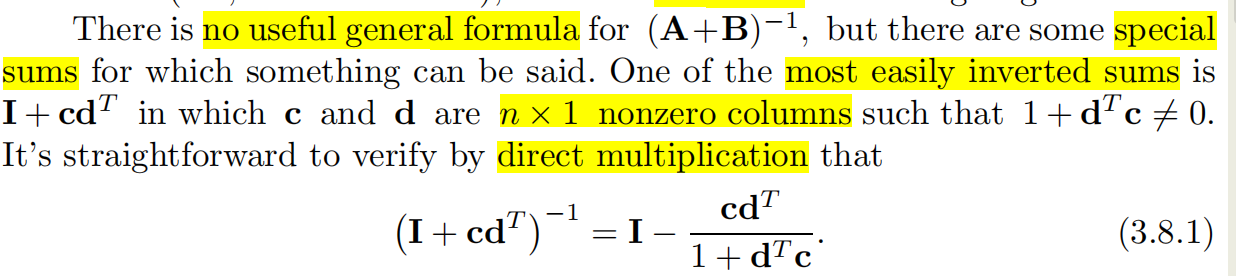
乘积AB的逆很好搞,但是和(A+B)的逆不是很好搞。
绝大多数情况 ( A + B ) − 1 ≠ A − 1 + B − 1 (A+B)^{-1}\neq A^{-1}+B^{-1} (A+B)−1=A−1+B−1
[!NOTE]
直接处理 ( A + B ) − 1 (A+B)^{-1} (A+B)−1不太好搞,但是可以通过构造另一种形式,可以很容易得到:
( I + c d T ) − 1 = I − c d T 1 + d T c \left(\mathbf{I}+\mathbf{c d}^T\right)^{-1}=\mathbf{I}-\frac{\mathbf{c d}^T}{1+\mathbf{d}^T \mathbf{c}} (I+cdT)−1=I−1+dTccdT
[!NOTE]
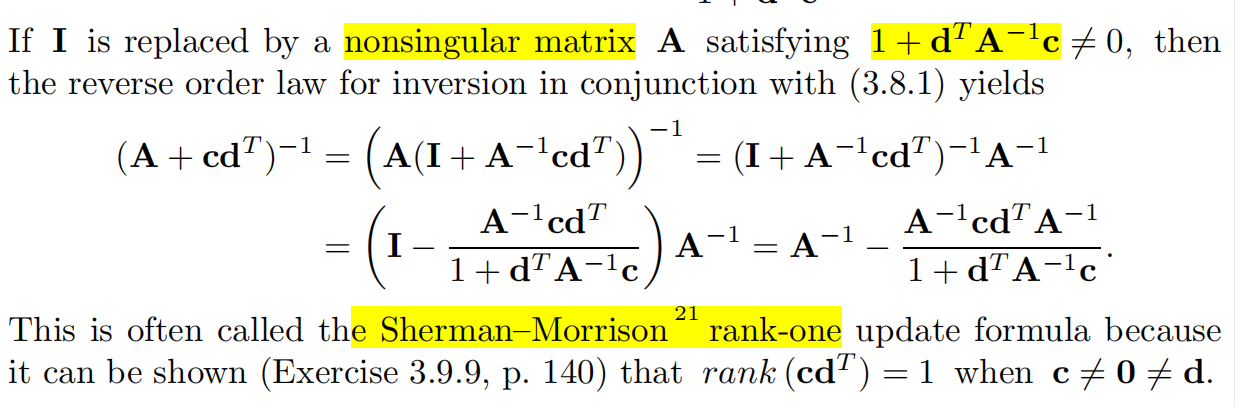
将A构造进去,并且转换成A乘法
[!NOTE]
举了个具体例子,看出,aij收到干扰的时候,A逆的变换情况,并且如何更新A逆
如果 A − 1 A^{-1} A−1已知的话:
- 取出第i列,第j行,以及第j行第i列处的元素即可计算其扰动情况了。

A n × n e n × 1 = B n × 1 = [ A 1 × n e n × 1... = A ∗ j A_{n\times n}e_{n\times 1}=B_{n\times 1}=[A_{1\times n}e_{n\times 1...}=A_{*j} An×nen×1=Bn×1=[A1×nen×1...=A∗j
e i T 1 × n A n × n = B 1 × n = A i ∗ e^T_i{}_{1\times n}A_{n\times n}=B_{1\times n}=A_{i*} eiT1×nAn×n=B1×n=Ai∗
右乘单位向量ej是取j列,左乘单位向量ei是取i行,同时左乘和右乘的是取第i行第j列。
左行右列
3.9 ELEMENTARY MATRICES AND EQUIVALENCE
[!NOTE]
数学里面把复杂对象分解为基本元素的思想非常常见,比如把大的多项式分解成一些小多项式的乘积,本节聚焦于如何将一个一般矩阵分解成更基础的矩阵的乘积
[!NOTE]
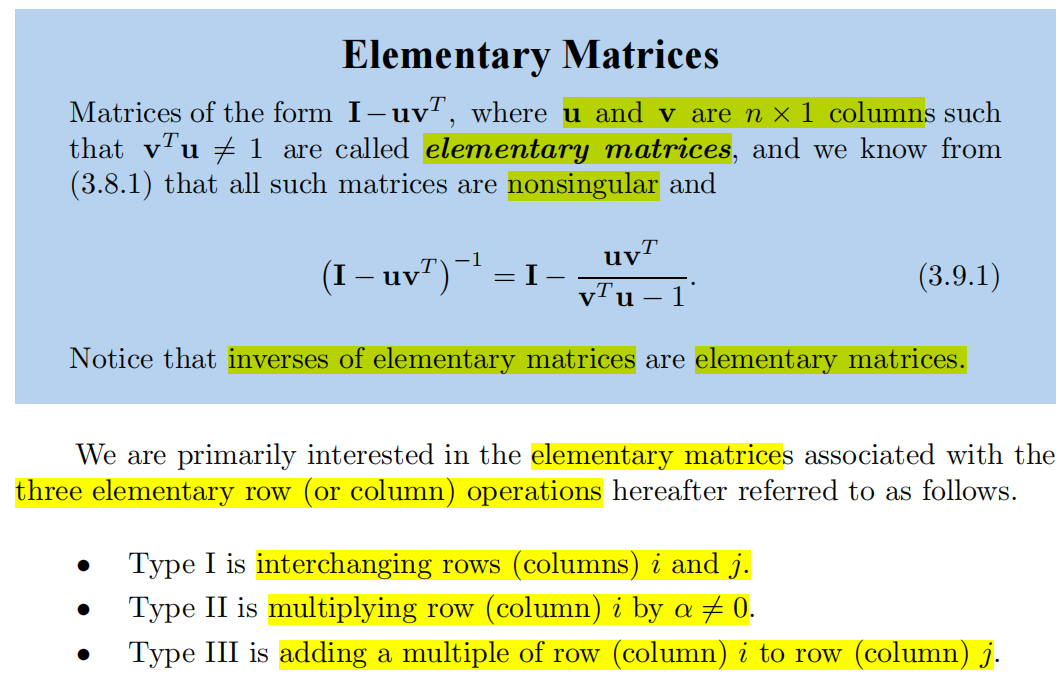
初等矩阵能与初等行变换结合起来。

[!NOTE]
初等矩阵的性质:
- 左行右列
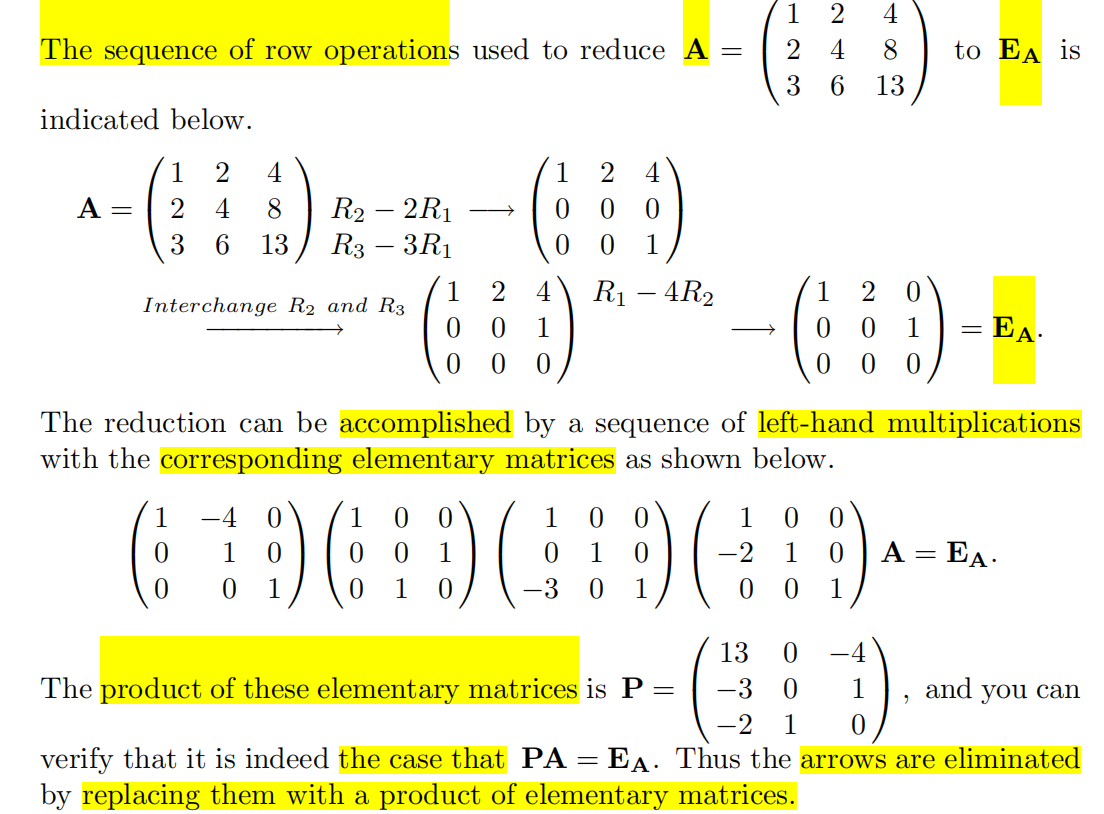
[!NOTE]
利用左行右列,则可将原来的变换过程,变成矩阵操作

[!NOTE]
初等矩阵的乘积一定是非奇异的
[!NOTE]
由于非奇异矩阵一定可以拆成初等矩阵之积,故AB等价可以如下定义。
[!NOTE]
行等价与列等价的概念

[!NOTE]
证明 E A E_A EA由 A A A唯一确定

[!NOTE]
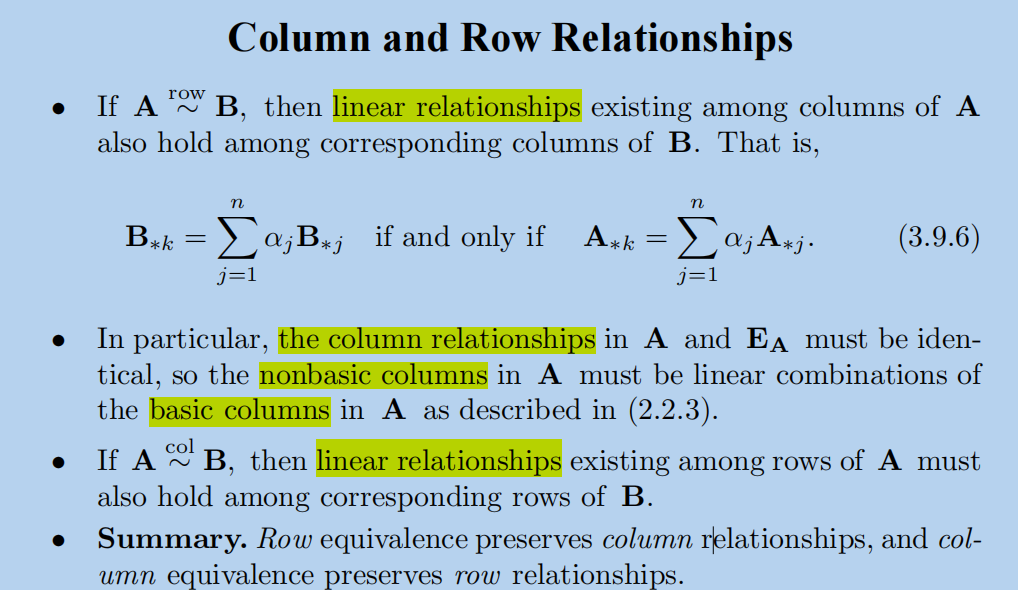
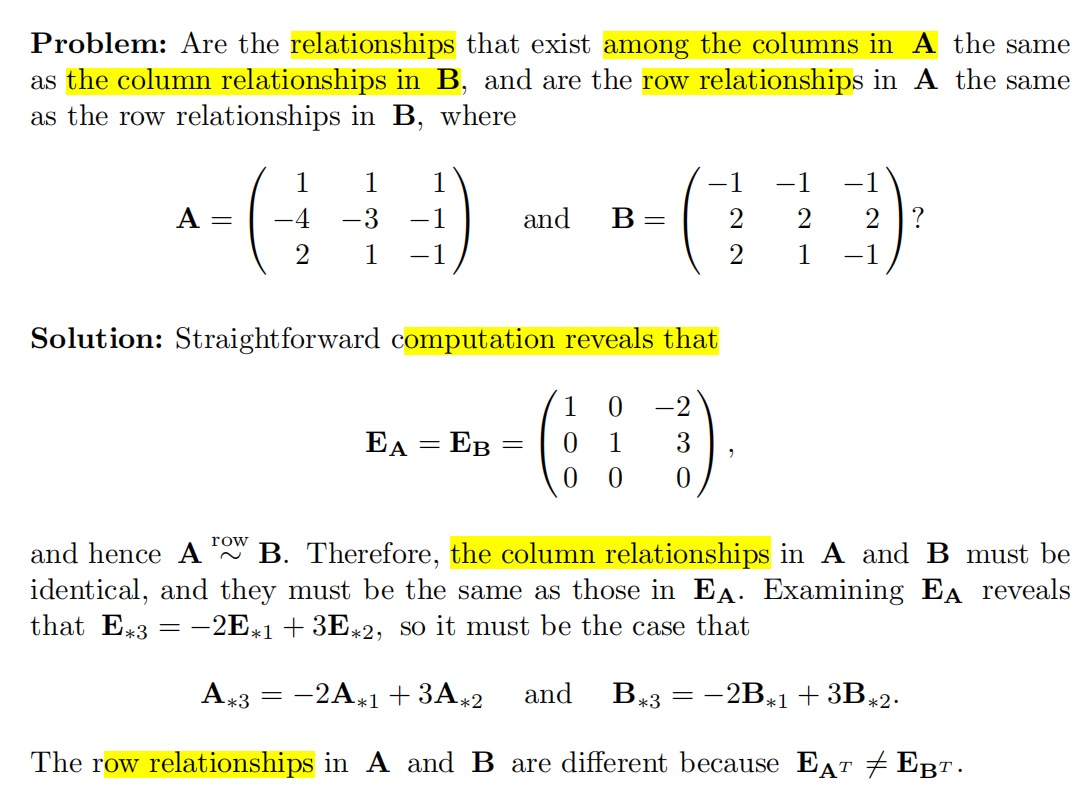
之前的内容可知,A中的列关系,与EA中的列关系是一样的
[!NOTE]
AB如果行等价的话,那么会保持对应的列关系
AB如果列等价的话,那么会保持对应的行关系
[!NOTE]
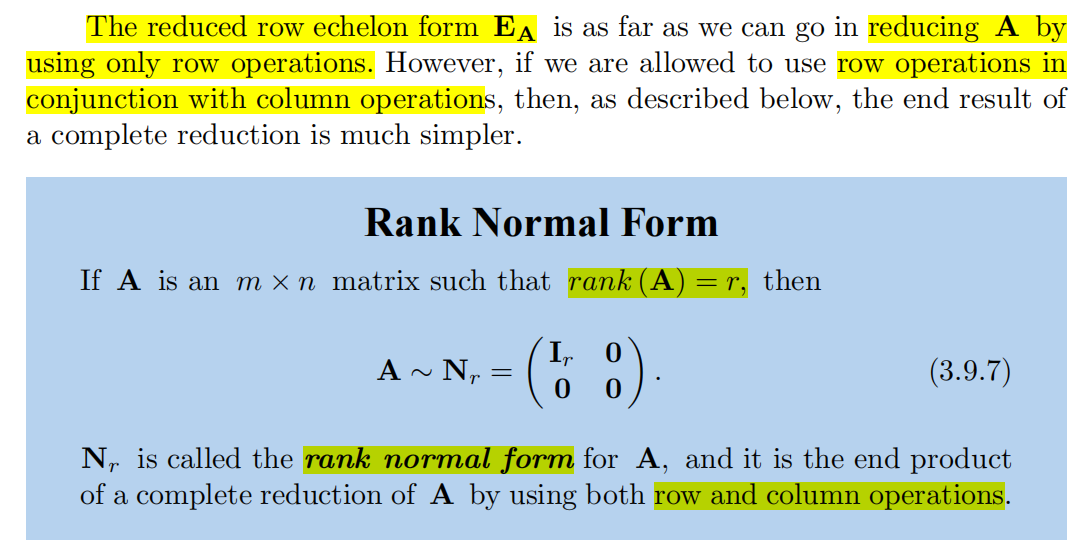
仅有行变换的话,能够得到行最简阶梯型 E A \mathbf{E}_{\mathbf{A}} EA
同时有行变换和列变换的话,能够得到秩标准型 N r \mathbf{N}_r Nr
[!NOTE]
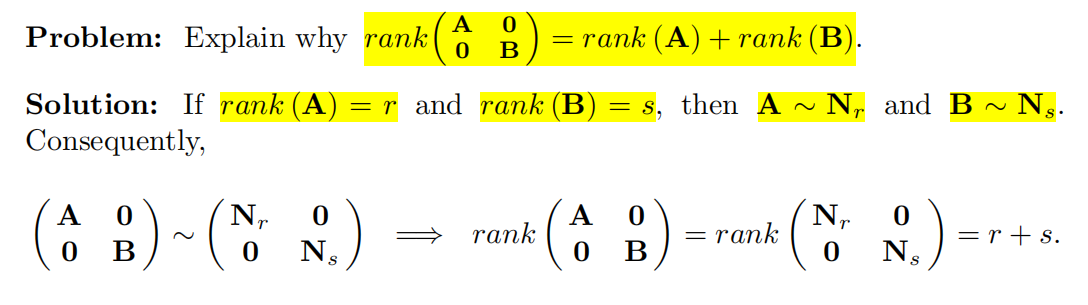
分块矩阵的秩
[!NOTE]
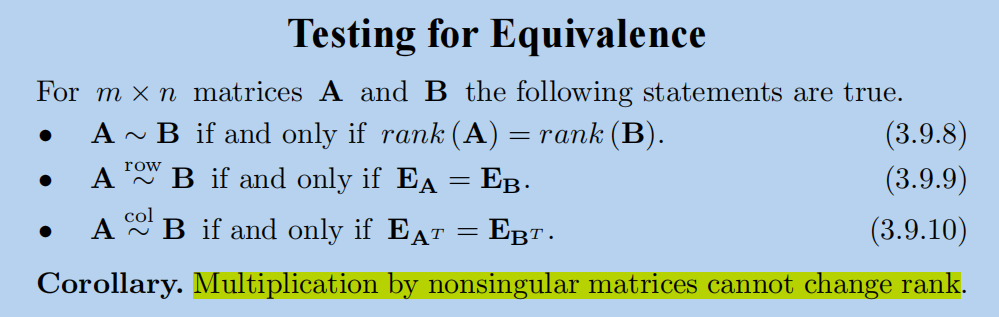
如何判断AB等价,行等价,列等价呢?
- 秩相等
- 行最简阶梯型相等
[!NOTE]
矩阵的转置并不改变矩阵的秩
3.10 THE LU FACTORIZATION
[!NOTE]
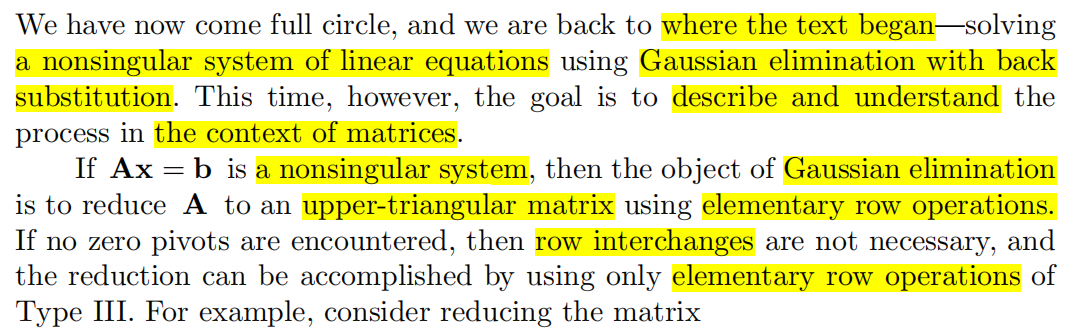
兜兜转转回到了使用带有回代法的高斯消元法求解一个线性非奇异系统,这次的这次目标是在矩阵背景下描述和理解这个过程。
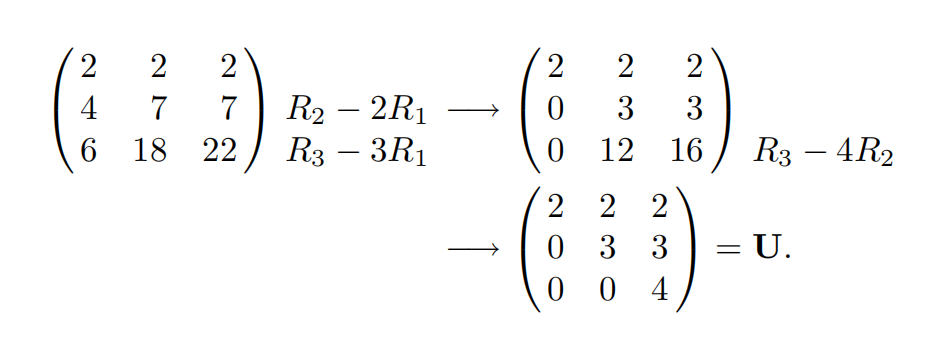
如果Ax=b,是一个非奇异系统,那么高斯消元法就是使用初等行变换将A化简成上三角矩阵。
[!NOTE]
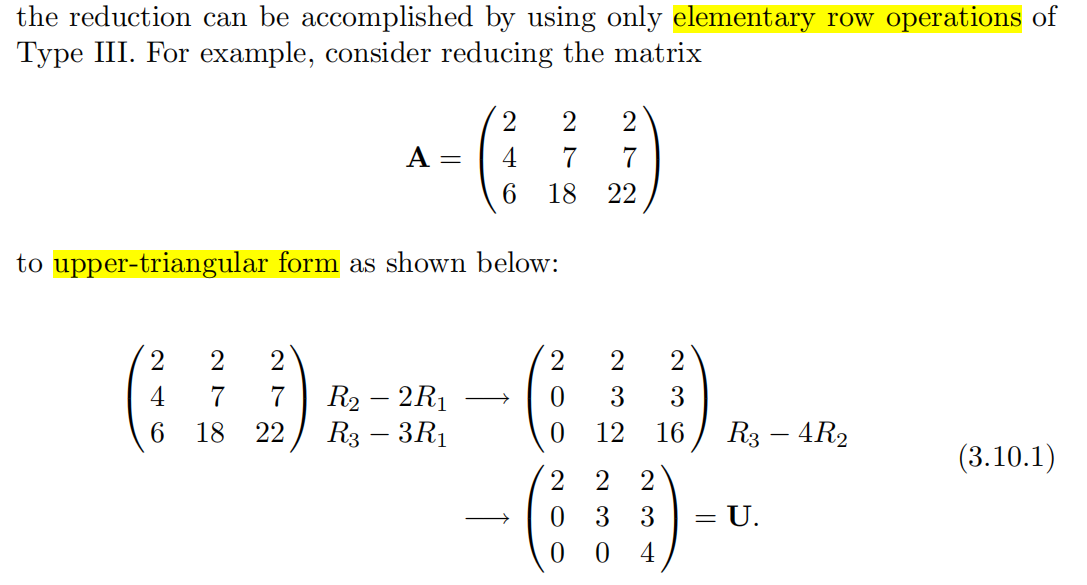
仅使用type III的初等行变换,能将A化成一个上三角矩阵U
[!NOTE]
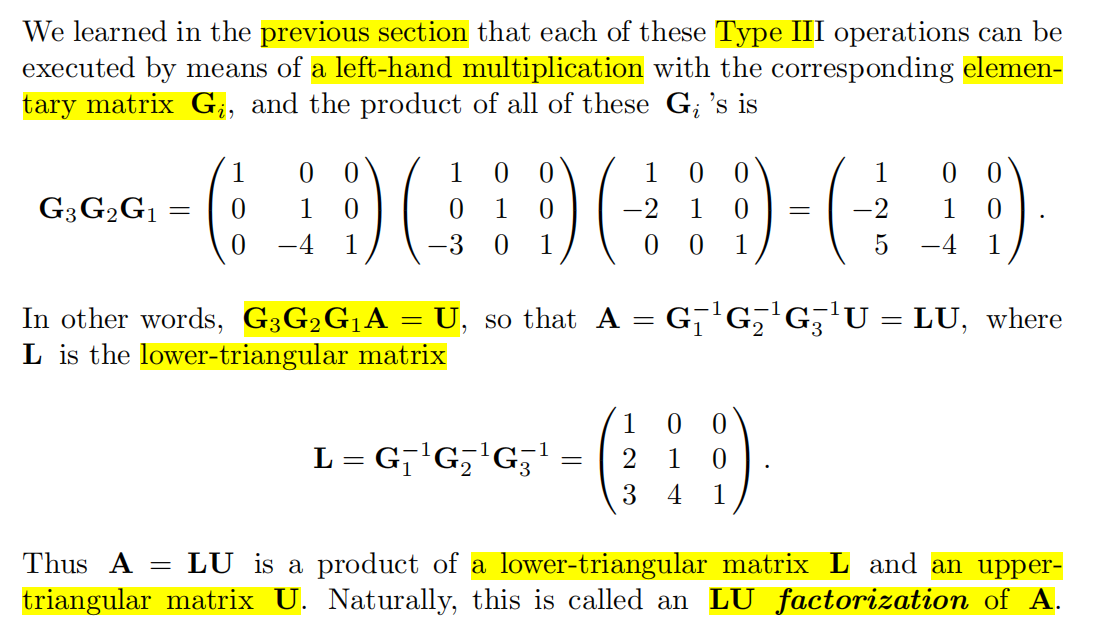
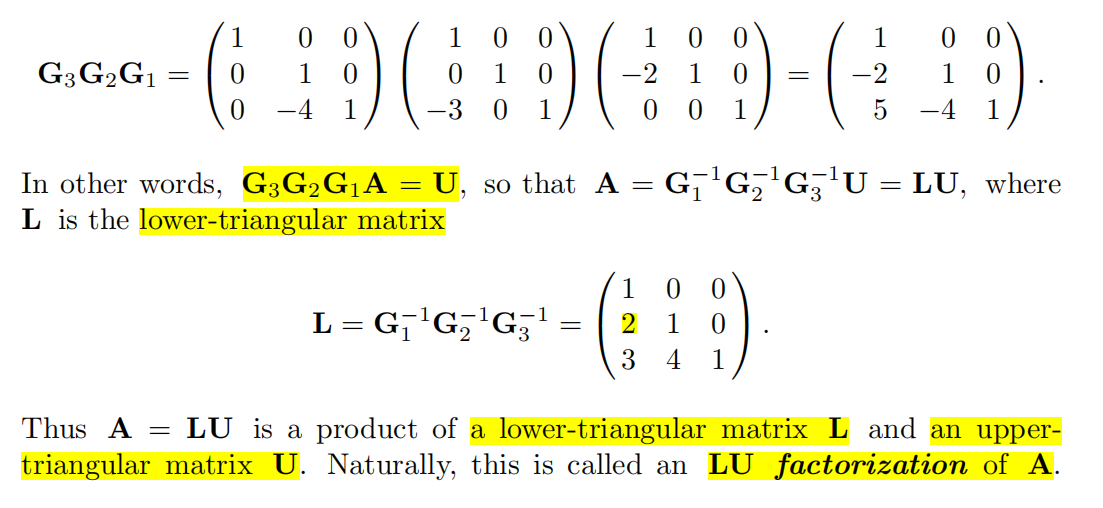
用初等变换矩阵G来描述整个初等行变换的过程,那么可以得到 G 3 G 2 G 1 A = U G_3G_2G_1A=U G3G2G1A=U, 由于初等矩阵是非奇异的,则 A = G 1 − 1 G 2 − 1 G 3 − 1 U = L U A=G_1^{-1}G_2^{-1}G_3^{-1}U=LU A=G1−1G2−1G3−1U=LU将 L = G 1 − 1 G 2 − 1 G 3 − 1 L=G_1^{-1}G_2^{-1}G_3^{-1} L=G1−1G2−1G3−1写出来为下三角矩阵,如此 A A A便被拆为了一个下三角矩阵和一个上三角矩阵的乘积,即LU分解
重新梳理上述过程如下:
 |  |
|---|
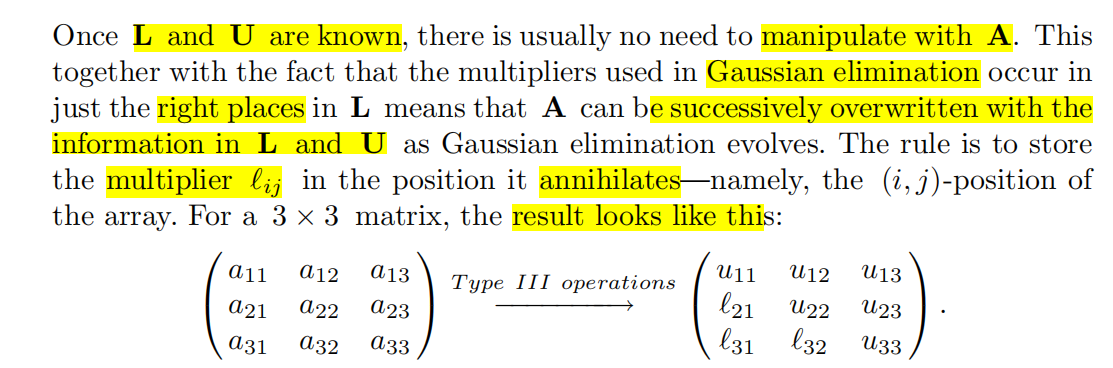
[!NOTE]
仅使用TypeIII 初等行变换(将第i行的 α \alpha α倍)加到第j行。
- U就是对A应用高斯消元法的最终结果,是个上三角矩阵
- L是过程中的初等行变换逆的乘积,是个下三角矩阵
- 主对角线为1
- 下面每个位置,都是消去时的乘子数
将上述过程推广如下:

首先通过引入一个初等下三角矩阵,来表示之前的TypeIII初等行变换
T
k
=
I
−
c
k
e
k
T
\mathbf{T}_k=\mathbf{I}-\mathbf{c}_k\mathbf{e}_k^T
Tk=I−ckekT
对
T
k
\mathbf{T}_k
Tk的要求就是,主对角线是1,主对角线下面就是操作的数。
c
k
=
(
0
0
⋮
μ
k
+
1
⋮
μ
n
)
,
t
h
e
n
T
k
=
(
1
0
⋯
0
0
⋯
0
0
1
⋯
0
0
⋯
0
⋮
⋮
⋱
⋮
⋮
⋮
0
0
⋯
1
0
⋯
0
0
0
⋯
−
μ
k
+
1
1
⋯
0
⋮
⋮
⋮
⋮
⋱
⋮
0
0
⋯
−
μ
n
0
⋯
1
)
\mathbf{c}_k=\left(\begin{array}{c}0 \\ 0 \\ \vdots \\ \mu_{k+1} \\ \vdots \\ \mu_n\end{array}\right), \quad then \quad \mathbf{T}_k=\left(\begin{array}{ccccccc}1 & 0 & \cdots & 0 & 0 & \cdots & 0 \\ 0 & 1 & \cdots & 0 & 0 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots & \vdots & & \vdots \\ 0 & 0 & \cdots & 1 & 0 & \cdots & 0 \\ 0 & 0 & \cdots & -\mu_{k+1} & 1 & \cdots & 0 \\ \vdots & \vdots & & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & -\mu_n & 0 & \cdots & 1\end{array}\right)
ck=
00⋮μk+1⋮μn
,thenTk=
10⋮00⋮001⋮00⋮0⋯⋯⋱⋯⋯⋯00⋮1−μk+1⋮−μn00⋮01⋮0⋯⋯⋯⋯⋱⋯00⋮00⋮1
c k = ( 0 0 ⋮ μ k + 1 ⋮ μ n ) n × 1 , e k T = [ 0 , 0 , . . . , 1 , . . . , 0 , 0 ] 1 × n \mathbf{c}_k=\left(\begin{array}{c}0 \\ 0 \\ \vdots \\ \mu_{k+1} \\ \vdots \\ \mu_n\end{array}\right)_{n\times 1}, \mathbf{e}_k^T=[0,0,...,1,...,0,0]_{1\times n} ck= 00⋮μk+1⋮μn n×1,ekT=[0,0,...,1,...,0,0]1×n
这种n行1列与1行n列的乘法,可以一个一个看,本质上,就是复制n列,然后取k列
上述初等下三角矩阵
T
k
\mathbf{T}_k
Tk的作用,消除第
k
k
k个主元下方的元素
$$
\mathbf{T}k \mathbf{A}{k-1}=\left(\mathbf{I}-\mathbf{c}k \mathbf{e}k^T\right) \mathbf{A}{k-1}=\mathbf{A}{k-1}-\mathbf{c}_k \mathbf{e}k^T \mathbf{A}{k-1}\
=\left(\begin{array}{ccccccc}
- & * & \cdots & \alpha_1 & * & \cdots & * \
0 & * & \cdots & \alpha_2 & * & \cdots & * \
\vdots & \vdots & \ddots & \vdots & \vdots & & \vdots \
0 & 0 & \cdots & \alpha_k & * & \cdots & * \
0 & 0 & \cdots & 0 & * & \cdots & * \
\vdots & \vdots & & \vdots & \vdots & \ddots & \vdots \
0 & 0 & \cdots & 0 & * & \cdots & *
\end{array}\right), \quad \text { where } \quad \mathbf{c}k=\left(\begin{array}{c}
0 \
0 \
\vdots \
0 \
\alpha{k+1} / \alpha_k \
\vdots \
\alpha_n / \alpha_k
\end{array}\right)
那么推导上述过程至消除掉所有 n 个主元下方的元素时,可以有: 那么推导上述过程至消除掉所有n个主元下方的元素时,可以有: 那么推导上述过程至消除掉所有n个主元下方的元素时,可以有:
\mathbf{T}_{n-1} \cdots \mathbf{T}_2 \mathbf{T}_1 \mathbf{A}=\mathbf{U}\
\rightarrow \mathbf{A}=\mathbf{T}_1^{-1} \mathbf{T}2^{-1} \cdots \mathbf{T}{n-1}^{-1} \mathbf{U}
$$
[!NOTE]
上述这个变换过程,以及前面T的逆的计算,解释了为什么L的主对角线元素下面的元素正好是高斯消去过程中的乘子.
将L单独拿出来看:
L
=
T
1
−
1
T
2
−
1
⋯
T
n
−
1
−
1
=
(
I
+
c
1
e
1
T
)
(
I
+
c
2
e
2
T
)
⋯
(
I
+
c
n
−
1
e
n
−
1
T
)
=
I
+
c
1
e
1
T
+
c
2
e
2
T
+
⋯
+
c
n
−
1
e
n
−
1
T
\begin{aligned} \mathbf{L}=\mathbf{T}_1^{-1} \mathbf{T}_2^{-1} \cdots \mathbf{T}_{n-1}^{-1} & =\left(\mathbf{I}+\mathbf{c}_1 \mathbf{e}_1^T\right)\left(\mathbf{I}+\mathbf{c}_2 \mathbf{e}_2^T\right) \cdots\left(\mathbf{I}+\mathbf{c}_{n-1} \mathbf{e}_{n-1}^T\right) \\ & =\mathbf{I}+\mathbf{c}_1 \mathbf{e}_1^T+\mathbf{c}_2 \mathbf{e}_2^T+\cdots+\mathbf{c}_{n-1} \mathbf{e}_{n-1}^T \end{aligned}
L=T1−1T2−1⋯Tn−1−1=(I+c1e1T)(I+c2e2T)⋯(I+cn−1en−1T)=I+c1e1T+c2e2T+⋯+cn−1en−1T
c k e k T = ( 0 0 ⋯ 0 0 ⋯ 0 0 0 ⋯ 0 0 ⋯ 0 ⋮ ⋮ ⋱ ⋮ ⋮ ⋮ 0 0 ⋯ 0 0 ⋯ 0 0 0 ⋯ ℓ k + 1 , k 0 ⋯ 0 ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ ℓ n k 0 ⋯ 0 ) \mathbf{c}_k \mathbf{e}_k^T=\left(\begin{array}{ccccccc} 0 & 0 & \cdots & 0 & 0 & \cdots & 0 \\ 0 & 0 & \cdots & 0 & 0 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots & \vdots & & \vdots \\ 0 & 0 & \cdots & 0 & 0 & \cdots & 0 \\ 0 & 0 & \cdots & \ell_{k+1, k} & 0 & \cdots & 0 \\ \vdots & \vdots & & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & \ell_{n k} & 0 & \cdots & 0 \end{array}\right) ckekT= 00⋮00⋮000⋮00⋮0⋯⋯⋱⋯⋯⋯00⋮0ℓk+1,k⋮ℓnk00⋮00⋮0⋯⋯⋯⋯⋱⋯00⋮00⋮0
其中
ℓ
k
+
1
,
k
\ell_{k+1, k}
ℓk+1,k是在第k阶段用于消除第k个主元下方的元素的乘数。最后得出:
A
=
L
U
L
=
I
+
c
1
e
1
T
+
c
2
e
2
T
+
⋯
+
c
n
−
1
e
n
−
1
T
=
(
1
0
0
⋯
0
ℓ
21
1
0
⋯
0
ℓ
31
ℓ
32
1
⋯
0
⋮
⋮
⋮
⋱
⋮
ℓ
n
1
ℓ
n
2
ℓ
n
3
⋯
1
)
\mathbf{A}=\mathbf{L U}\\ \mathbf{L}=\mathbf{I}+\mathbf{c}_1 \mathbf{e}_1^T+\mathbf{c}_2 \mathbf{e}_2^T+\cdots+\mathbf{c}_{n-1} \mathbf{e}_{n-1}^T=\left(\begin{array}{ccccc} 1 & 0 & 0 & \cdots & 0 \\ \ell_{21} & 1 & 0 & \cdots & 0 \\ \ell_{31} & \ell_{32} & 1 & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ \ell_{n 1} & \ell_{n 2} & \ell_{n 3} & \cdots & 1 \end{array}\right)
A=LUL=I+c1e1T+c2e2T+⋯+cn−1en−1T=
1ℓ21ℓ31⋮ℓn101ℓ32⋮ℓn2001⋮ℓn3⋯⋯⋯⋱⋯000⋮1
因此,LU分解可以看作是不使用行交换的高斯消元法的矩阵形式。
[!NOTE]
核心点:
- L是下三角矩阵,主对角线是1,主对角线下面是高斯消元法过程的乘子。
- U是上三角矩阵,是高斯消元法的最终结果。·
[!NOTE]
这个有点儿吊,LU分解过程中,直接把乘子更新到固定位置就行
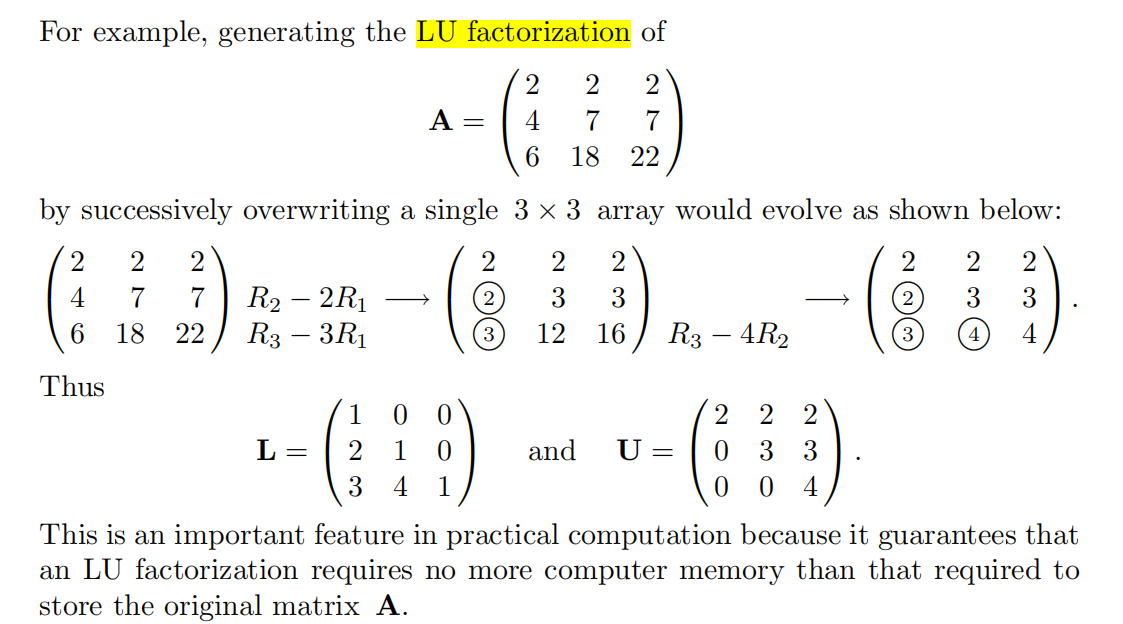
[!NOTE]
这个有点儿吊,操作完之后,直接把操作数放进去就行了,并且可同时求出LU
 |  |
|---|
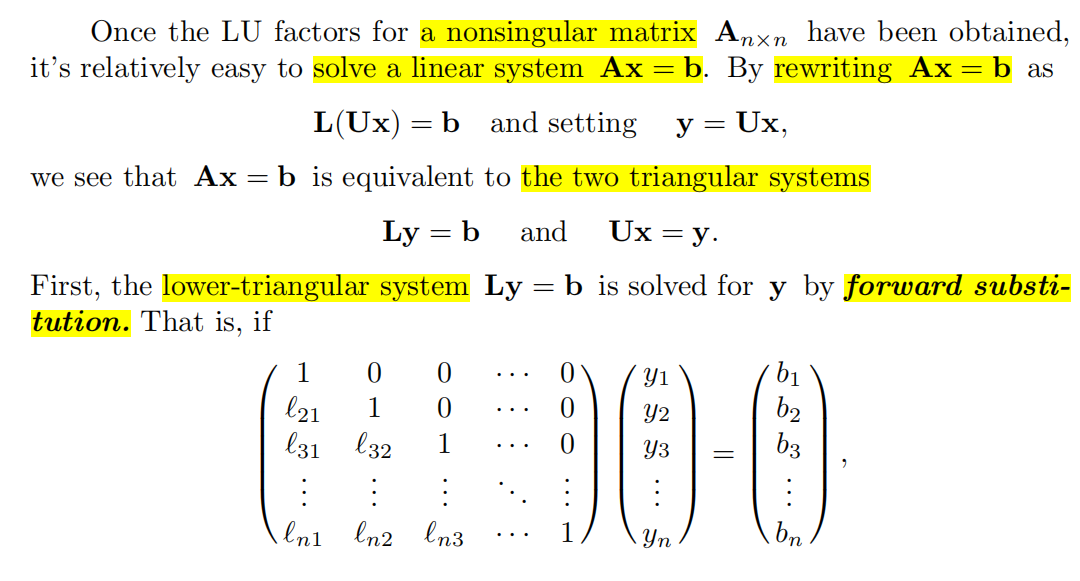
[!NOTE]
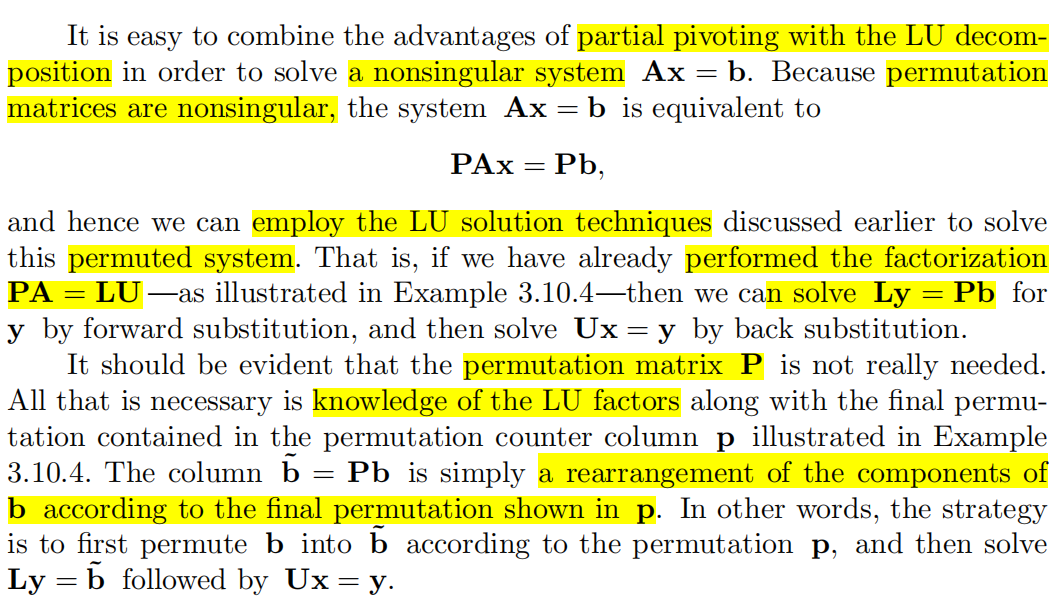
这部分也有点儿牛逼,通过LU分解,可以将原来的Ax=b,拆分成两个三角系统,一个由下三角矩阵L构成的下三角矩阵,一个由上三角矩阵U构成的上三角矩阵,这样LU分解中,求解的复杂度从原来的 n 3 / 3 n^3/3 n3/3下降到了 2 n 2 − n 2n^2-n 2n2−n
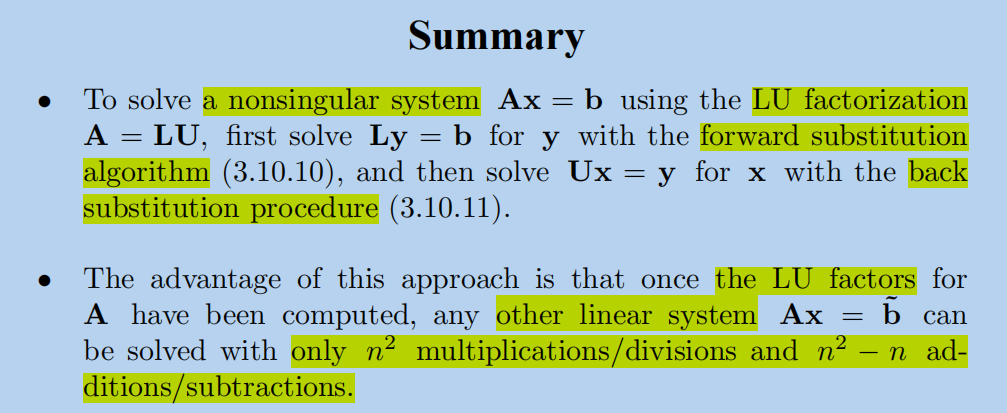
[!NOTE]
在求解类似问题时,一旦LU被计算出来了,那么会快特别多。下面例子描述了该过程
[!NOTE]
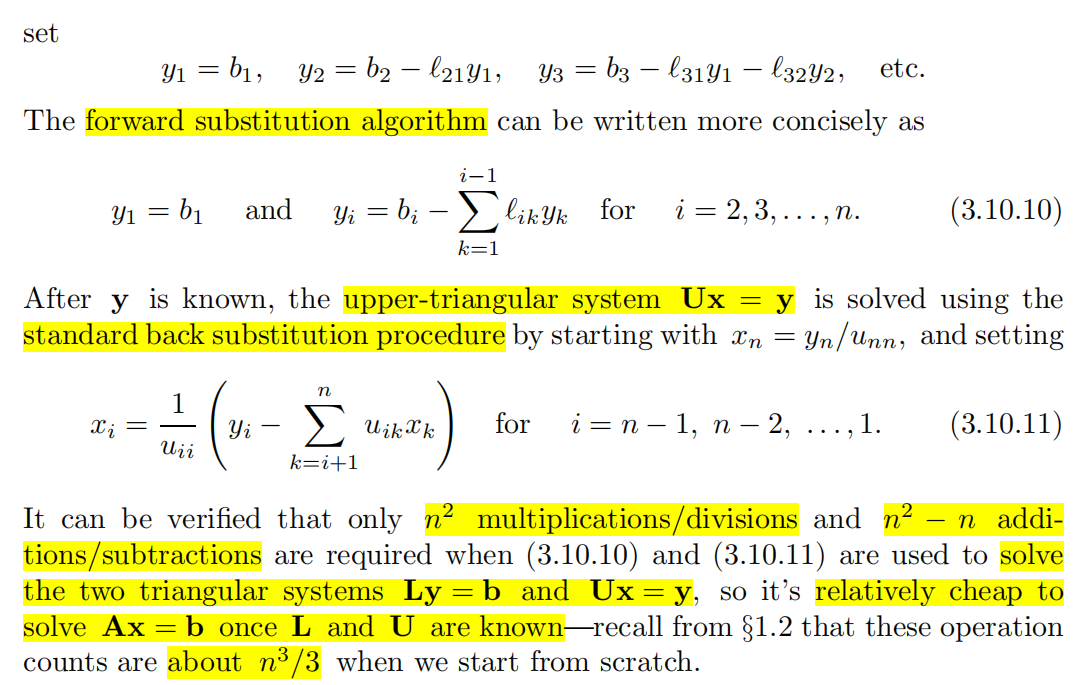
已知A=LU,那么Ax=b就变成了LUx=b, 可以拆成Ux=y,Ly=b,由于y是下三角矩阵,可以使用前代法求解,Ly=b,得到y:
由于U是上三角矩阵,可以使用反向回代法,求解Ux=y,得到x:



[!NOTE]
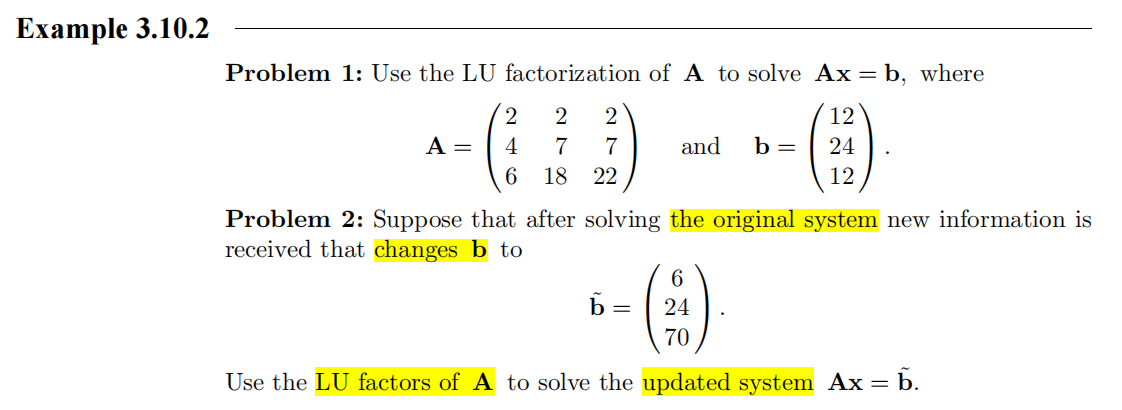
之前说 A − 1 \mathbf{A}^{-1} A−1的求解代价很大,但是有时候不得不用到 A − 1 \mathbf{A}^{-1} A−1,故下面解释如何使用LU因子去高效的计算 A − 1 \mathbf{A}^{-1} A−1
[!NOTE]
核心思路是计算 A \mathbf{A} A X \mathbf{X} X= I \mathbf{I} I,然后把 A − 1 \mathbf{A}^{-1} A−1看作是 A x j = e j \mathbf{A}\mathbf{x}_j=\mathbf{e}_j Axj=ej的解,然后用LU因子求解
带有行交换的LU分解
[!NOTE]
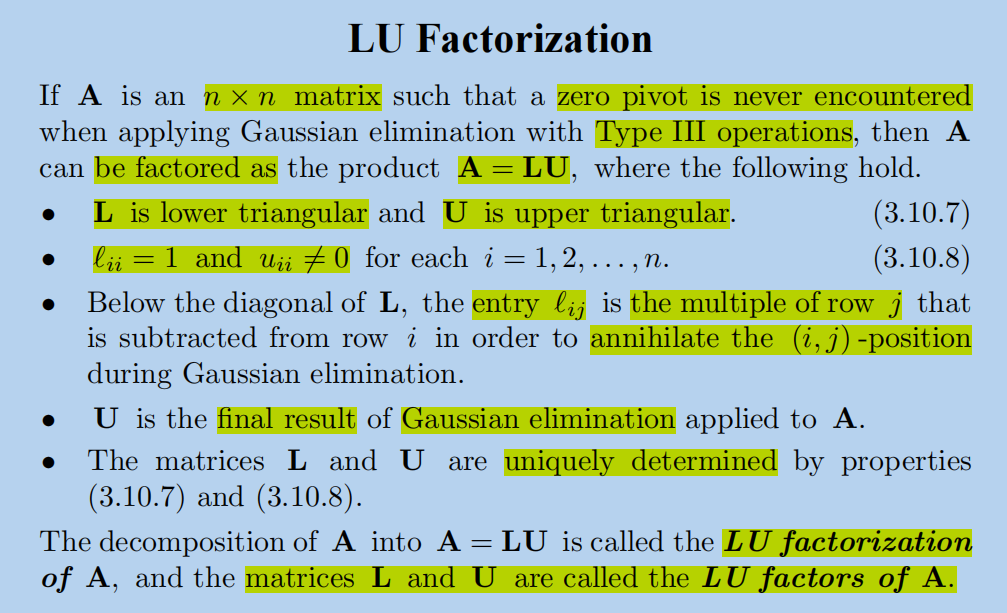
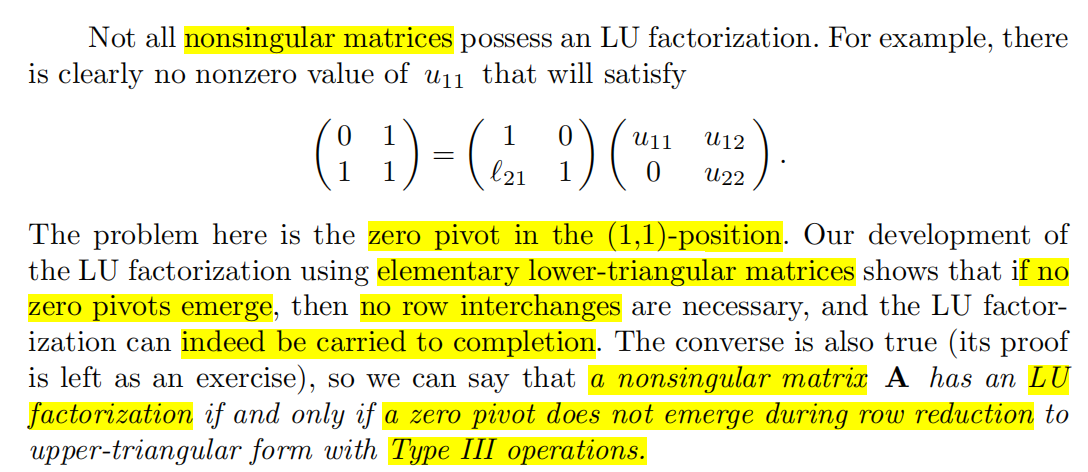
不是所有的非奇异矩阵都有LU分解,只有在化简矩阵没有零主元出现时才有LU分解
[!NOTE]
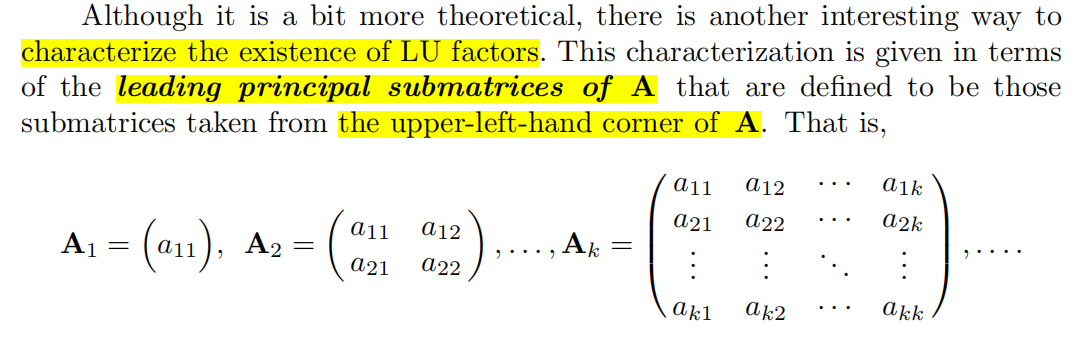
利用从矩阵 A \mathbf{A} A中的左上角提取的顺序主子矩阵来描述LU因子的存在性
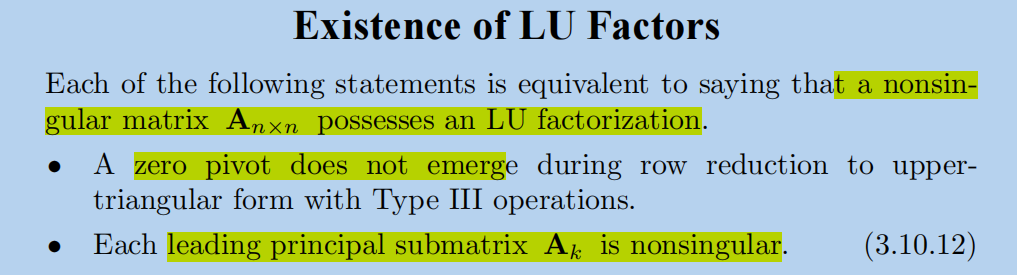
[!NOTE]
- Type III 初等行变换时没有零主元
- 顺序主子矩阵 A k \mathbf{A}_k Ak是非奇异的
[!NOTE]
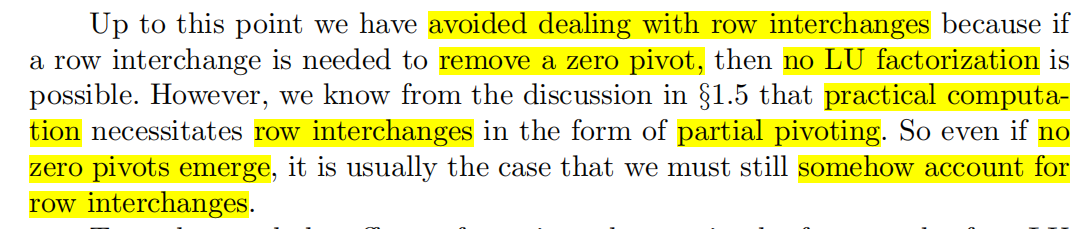
有时候不得不处理行变换,因为即使没有0主元出现,有时候需要部分主元法
[!NOTE]
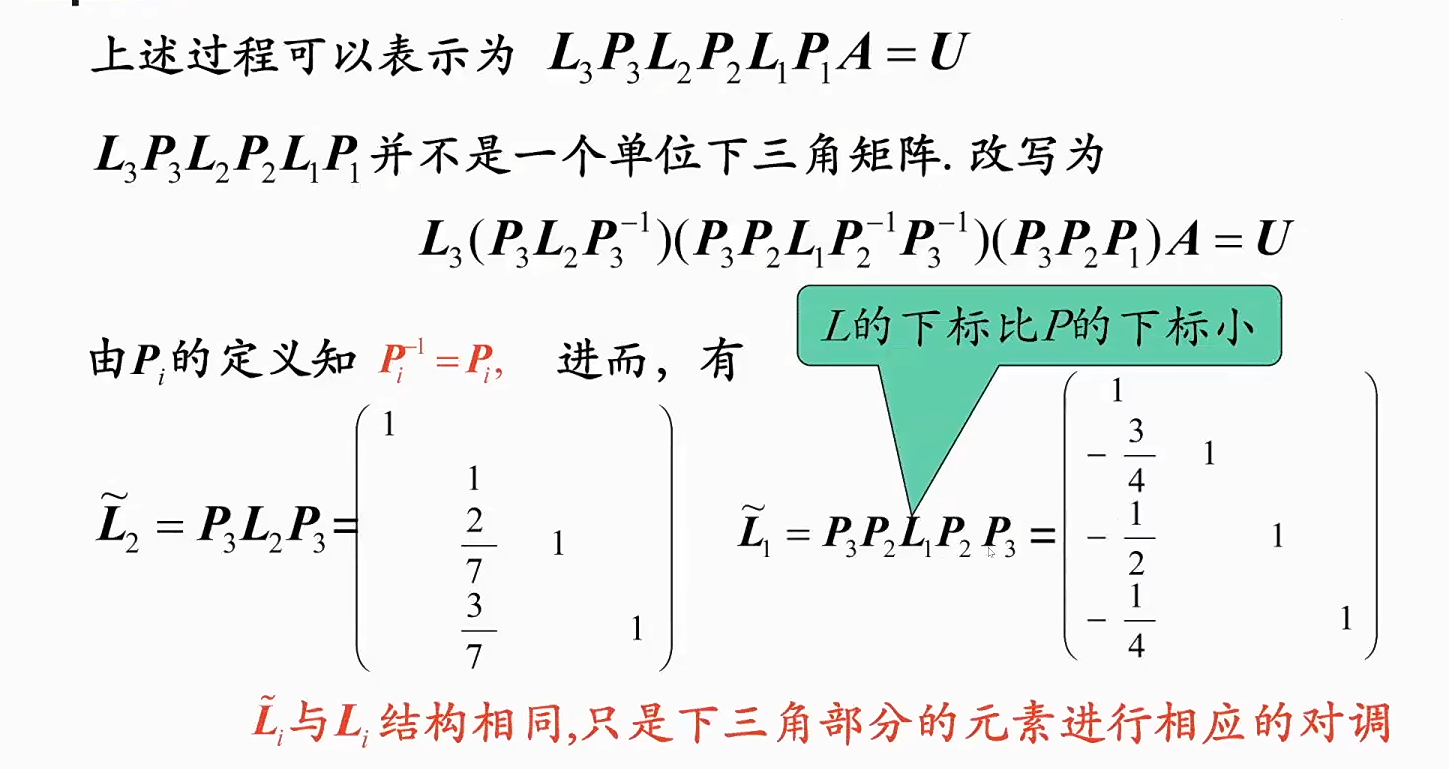
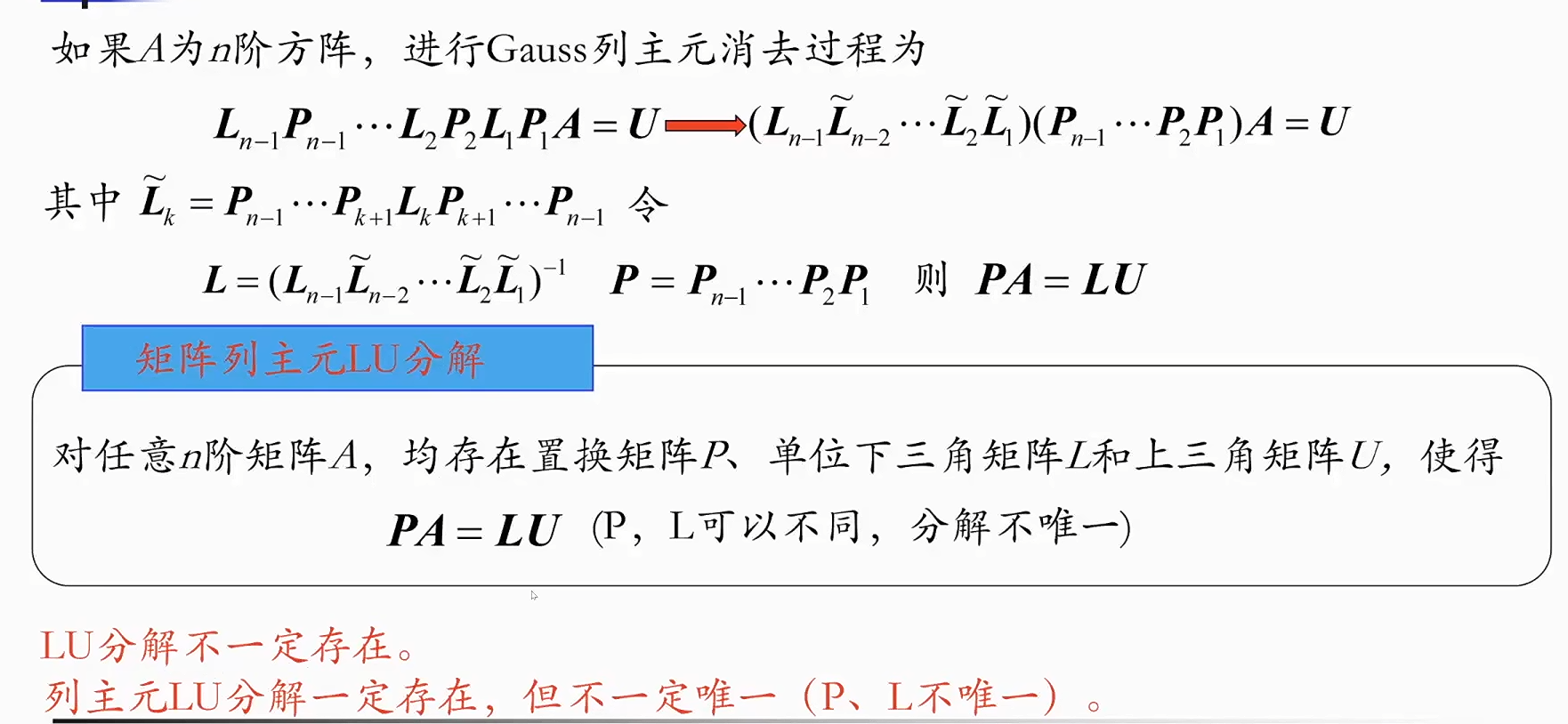
上述是 P A = L U \mathbf{P}\mathbf{A}=\mathbf{L}\mathbf{U} PA=LU的求解思路和求解过程。核心思路是把 P \mathbf{P} P抽出来,只需要改 L \mathbf{L} L即可
[!NOTE]
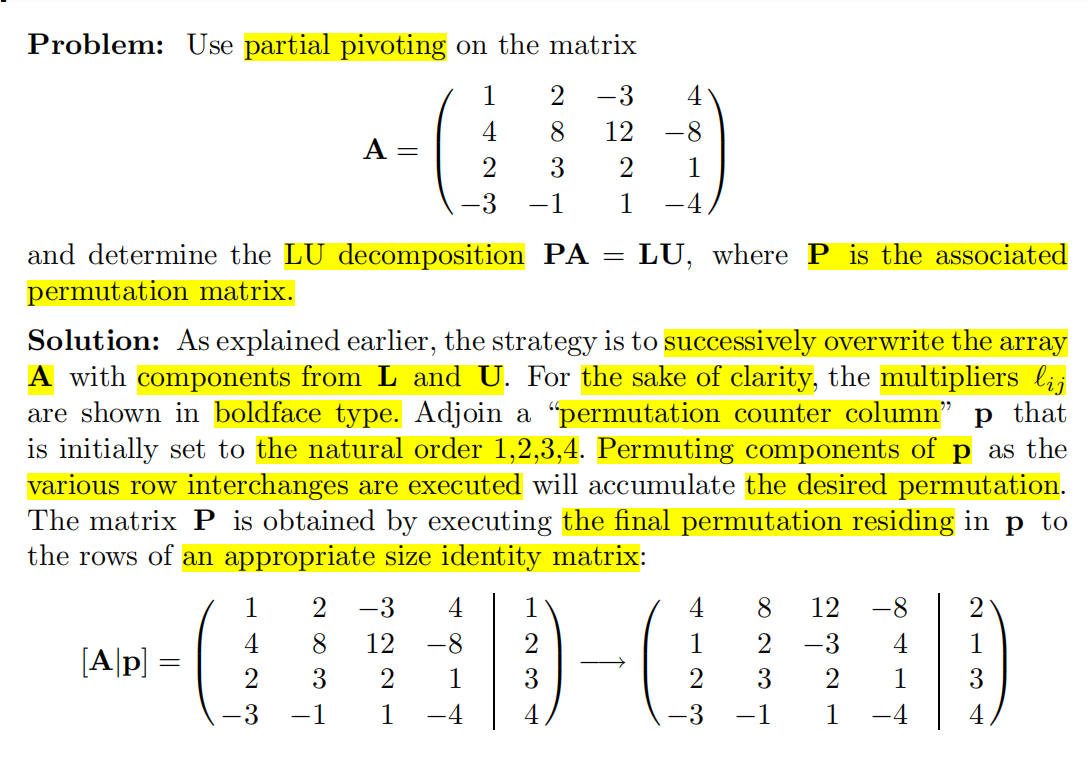
列主元法求解线性方程组
[!NOTE]
利用一个计数器p,进行计数,有点儿牛逼的。
[!NOTE]
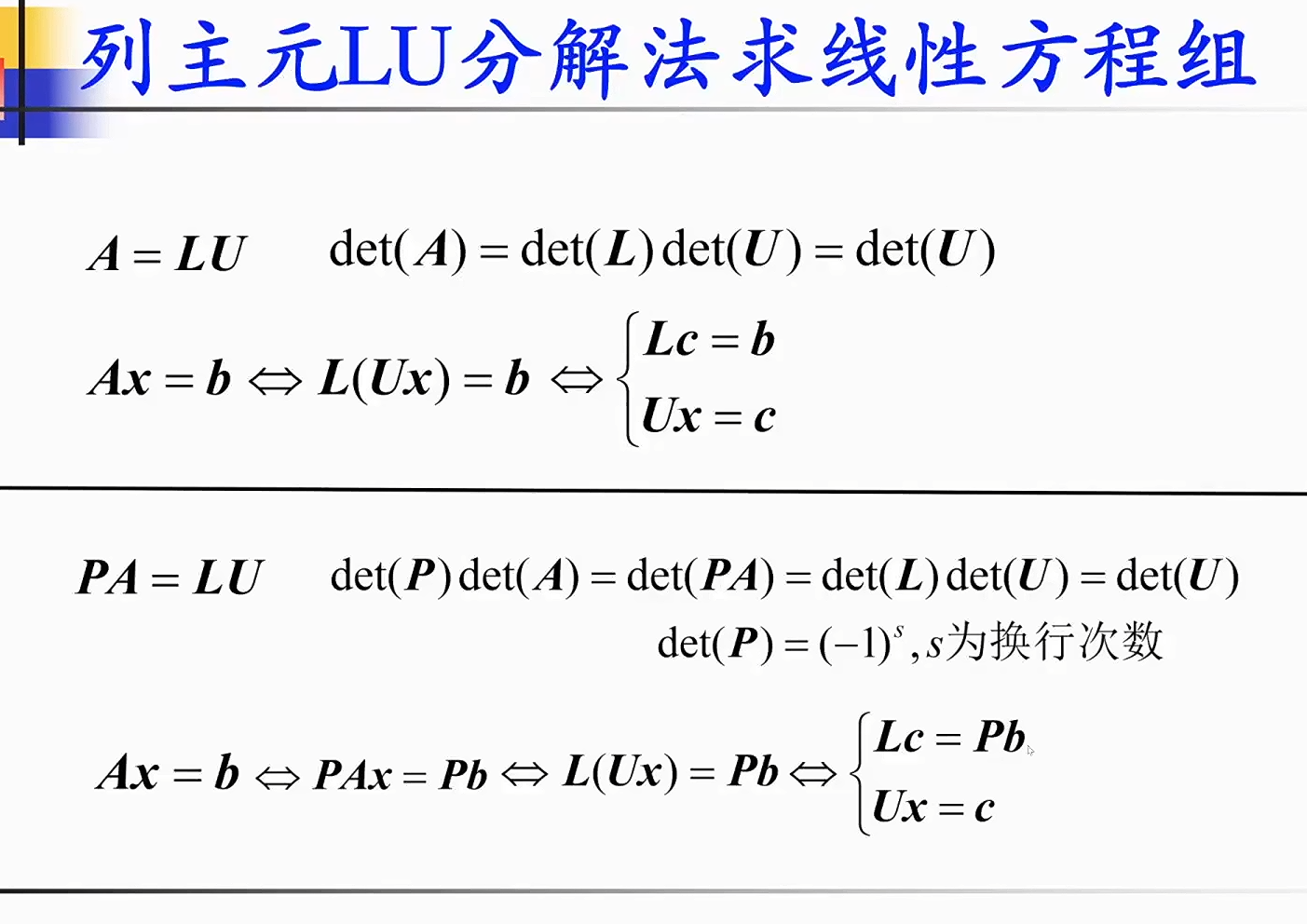
同上,利用 P A = L U \mathbf{P}\mathbf{A}=\mathbf{L}\mathbf{U} PA=LU求解系统方程
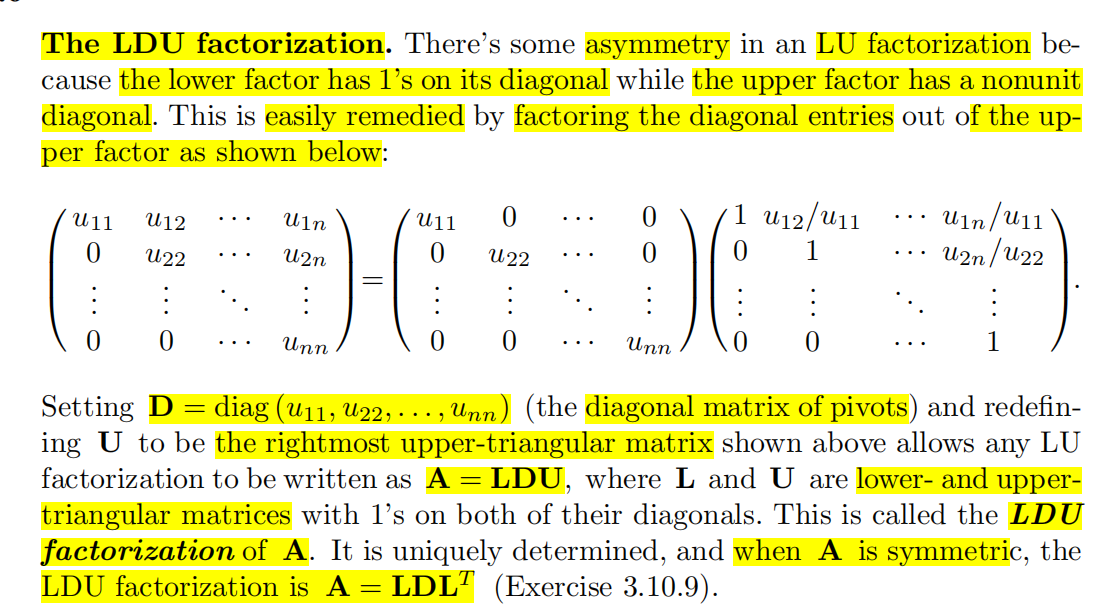
[!NOTE]
L D U \mathbf{L}\mathbf{D}\mathbf{U} LDU分解意思是 L U \mathbf{L}\mathbf{U} LU分解是不对称的,核心原因是 U \mathbf{U} U的对角线非1,故将对角线提出 D \mathbf{D} D
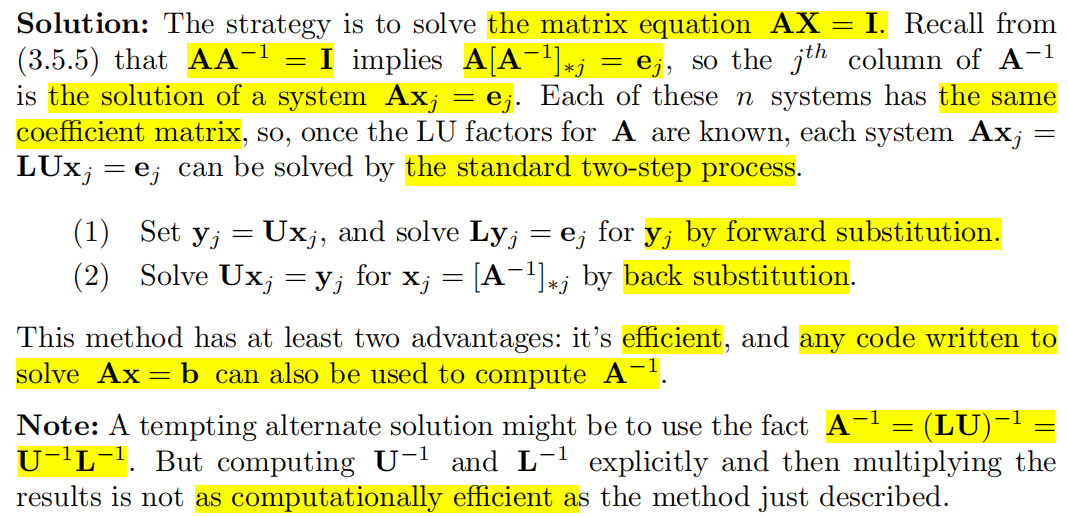
题目
 |  |
|---|
第1题解答

从(a)出发,如果
A
\mathbf{A}
A是对称矩阵的话,则有
A
=
A
T
\mathbf{A}=\mathbf{A}^T
A=AT。如果
A
\mathbf{A}
A是反对称矩阵的话,则有
A
=
−
A
T
\mathbf{A}=-\mathbf{A}^T
A=−AT。如果
A
\mathbf{A}
A既是对称矩阵又是反对称矩阵的话,此时有如下推导:
A
=
A
T
=
−
A
T
2
A
T
=
0
A
T
=
0
=
A
\mathbf{A}=\mathbf{A}^T=-\mathbf{A}^T\\ 2\mathbf{A}^T=\mathbf{0} \\\mathbf{A}^T=\mathbf{0}=\mathbf{A}
A=AT=−AT2AT=0AT=0=A
从上述推导可知,
A
=
0
\mathbf{A}=0
A=0。
从(b)出发,如果
A
\mathbf{A}
A是厄密特矩阵的话,则有
A
=
A
∗
\mathbf{A}=\mathbf{A}^*
A=A∗。如果
A
\mathbf{A}
A是对称矩阵的话,则有
A
=
A
T
\mathbf{A}=\mathbf{A}^T
A=AT。如果
A
\mathbf{A}
A既是厄密特矩阵又是对称矩阵的话,此时有如下推导:
A
=
A
∗
A
=
A
T
A
∗
=
A
T
‾
=
A
T
A
‾
=
A
\mathbf{A}=\mathbf{A}^*\\ \mathbf{A}=\mathbf{A}^T\\ \mathbf{A}^*=\overline{\mathbf{A}^T}=\mathbf{A}^T\\ \overline{\mathbf{A}}=\mathbf{A}
A=A∗A=ATA∗=AT=ATA=A
从上述推导可知,
A
\mathbf{A}
A是实对称矩阵;
从©出发,该限制很松,很多矩阵都是反厄密特矩阵,不过结合(b)和©的话同样可以推出 A = 0 \mathbf{A}=0 A=0。
综上所述,矩阵 A \mathbf{A} A是一个3x3的零矩阵 0 3 × 3 \mathbf{0}_{3\times3} 03×3时,满足上面所有条件

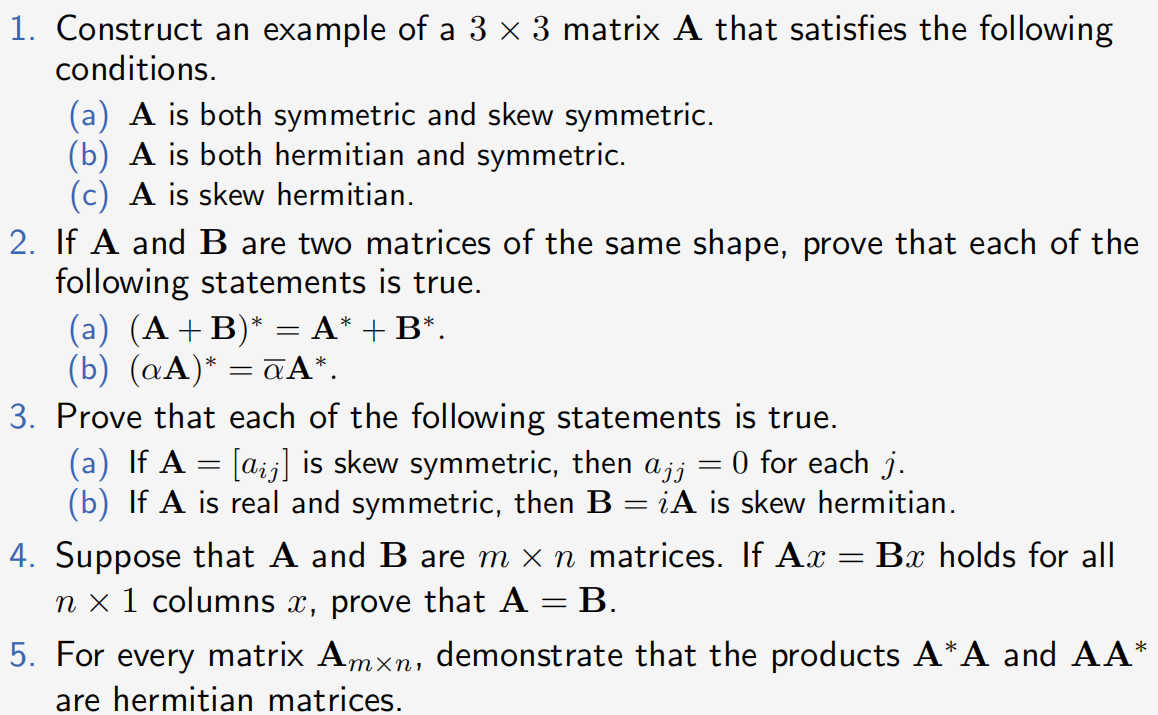
构造一个3x3矩阵 A \mathbf{A} A满足如下条件:
- A \mathbf{A} A既是对称矩阵,又是反对称矩阵
- A \mathbf{A} A既是厄密特矩阵,又是对称矩阵
- A \mathbf{A} A是反厄密特矩阵
第2题解答

针对(a)给出的证明如下:
从等式左边入手,根据矩阵共轭转置的定义和性质可知:
[
(
A
+
B
)
∗
]
i
j
=
[
A
+
B
‾
]
j
i
\left[(\mathbf{A}+\mathbf{B})^*\right]_{i j}=[\overline{\mathbf{A}+\mathbf{B}}]_{j i}
[(A+B)∗]ij=[A+B]ji
根据矩阵加法的性质可知:
[
(
A
+
B
)
∗
]
i
j
=
[
A
‾
+
B
‾
]
j
i
=
[
A
‾
]
j
i
+
[
B
‾
]
j
i
=
[
A
∗
]
i
j
+
[
B
∗
]
i
j
=
[
A
∗
+
B
∗
]
i
j
(
A
+
B
)
∗
=
A
∗
+
B
∗
\left[(\mathbf{A}+\mathbf{B})^*\right]_{i j}=[\overline{\mathbf{A}}+\overline{\mathbf{B}}]_{j i}=[\overline{\mathbf{A}}]_{j i}+[\overline{\mathbf{B}}]_{j i}=\left[\mathbf{A}^*\right]_{i j}+\left[\mathbf{B}^*\right]_{i j}=[\mathbf{A}^*+\mathbf{B}^*]_{ij}\\ (\mathbf{A}+\mathbf{B})^*=\mathbf{A}^*+\mathbf{B}^*
[(A+B)∗]ij=[A+B]ji=[A]ji+[B]ji=[A∗]ij+[B∗]ij=[A∗+B∗]ij(A+B)∗=A∗+B∗
由上述推导可知,
(
A
+
B
)
∗
=
A
∗
+
B
∗
(\mathbf{A}+\mathbf{B})^*=\mathbf{A}^*+\mathbf{B}^*
(A+B)∗=A∗+B∗得证。
针对(b)给出的证明如下:
根据矩阵共轭转置和标量乘法的定义和性质可知:
[
(
α
A
)
∗
]
i
j
=
[
α
A
‾
]
j
i
=
[
α
ˉ
A
‾
]
j
i
=
α
ˉ
[
A
‾
]
j
i
=
α
ˉ
[
A
∗
]
i
j
(
α
A
)
∗
=
α
ˉ
A
∗
\left[(\alpha \mathbf{A})^*\right]_{i j}=[\overline{\alpha \mathbf{A}}]_{j i}=[\bar{\alpha} \overline{\mathbf{A}}]_{j i}=\bar{\alpha}[\overline{\mathbf{A}}]_{j i}=\bar{\alpha}\left[\mathbf{A}^*\right]_{i j}\\ (\alpha \mathbf{A})^*=\bar{\alpha} \mathbf{A}^*
[(αA)∗]ij=[αA]ji=[αˉA]ji=αˉ[A]ji=αˉ[A∗]ij(αA)∗=αˉA∗
由上述推导可知,
(
α
A
)
∗
=
α
ˉ
A
∗
(\alpha \mathbf{A})^*=\bar{\alpha} \mathbf{A}^*
(αA)∗=αˉA∗得证。
2.如果 A \mathbf{A} A和 B \mathbf{B} B是两个相同大小的矩阵,证明下面的声明成立:
- ( A + B ) ∗ = A ∗ + B ∗ (\mathbf{A}+\mathbf{B})^*=\mathbf{A}^*+\mathbf{B}^* (A+B)∗=A∗+B∗
- ( α A ) ∗ = α ˉ A ∗ (\alpha \mathbf{A})^*=\bar{\alpha}\mathbf{A}^* (αA)∗=αˉA∗

第3题解答

针对(a)给出证明如下:
如果 A = [ a i j ] \mathbf{A}=[a_{ij}] A=[aij]是反对称矩阵的话,则有 A = − A T \mathbf{A}=-\mathbf{A}^T A=−AT,即 a i j = − a j i a_{ij}=-a_{ji} aij=−aji。因为 a i j = − a j i a_{ij}=-a_{ji} aij=−aji,如果 i = j i=j i=j的话,则有 a j j = − a j j a_{jj}=-a_{jj} ajj=−ajj,那么可得 a j j = 0 a_{jj}=0 ajj=0。
针对(b)给出证明如下:
如果 A \mathbf{A} A是实对称矩阵,那么 A = A T , A = A ˉ \mathbf{A}=\mathbf{A}^T,\mathbf{A}=\mathbf{\bar{A}} A=AT,A=Aˉ,那么可推得 A = A T ‾ \mathbf{A}=\overline{\mathbf{A}^T} A=AT,即 A = A ∗ \mathbf{A}=\mathbf{A}^{*} A=A∗。
要证明
B
=
i
A
\mathbf{B}=i\mathbf{A}
B=iA为反对称矩阵的话,只需证明
B
=
−
B
∗
\mathbf{B}=-\mathbf{B}^{*}
B=−B∗。证明过程如下:
B
∗
=
(
i
A
)
∗
=
−
i
A
∗
=
−
i
A
=
−
B
\mathbf{B}^{*}=(i\mathbf{A})^*=-i\mathbf{A}^{*}=-i\mathbf{A}=-\mathbf{B}
B∗=(iA)∗=−iA∗=−iA=−B
由上述证明可知,如果
A
\mathbf{A}
A是实对称矩阵的话,
B
=
i
A
\mathbf{B}=i\mathbf{A}
B=iA为反对称矩阵。
3.证明下面的每个声明都是正确的:
- 如果 A = [ a i j ] \mathbf{A}=[a_{ij}] A=[aij]是斜对称的,那么对于每个 j j j都有 a j j = 0 a_{jj}=0 ajj=0
- 如果 A \mathbf{A} A是实对称的,那么 B = i A \mathbf{B}=i\mathbf{A} B=iA是反共轭的

第4题解答

将
x
x
x写出,并按照基向量展开:
$$
x=\begin{pmatrix}
x_1\
x_2\
…\
x_{n-1}\
x_n
\end{pmatrix}=x_1
\begin{pmatrix}
1\0\…\0\0
\end{pmatrix}+···+x_n
\begin{pmatrix}
0\0\…\0\1
\end{pmatrix}=x_1\mathbf{e}{1}+···+x_n\mathbf{e}{n}
KaTeX parse error: Can't use function '$' in math mode at position 4: 那么$̲(\mathbf{A}x)_{…
\mathbf{A} \mathbf{e}_j=\mathbf{B} \mathbf{e}j ,\quad\forall \mathbf{e}j\
\mathbf{A}{*j}=\mathbf{B}{*j},\quad\forall j\
\mathbf{A}=\mathbf{B}
$$
由上述推导可证明如果
A
m
×
n
x
n
×
1
=
B
m
×
n
x
n
×
1
\mathbf{A}_{m\times n}x_{n\times 1}=\mathbf{B_{m\times n}}x_{n\times 1}
Am×nxn×1=Bm×nxn×1,对所有
n
×
1
n\times1
n×1列
x
x
x成立,则
A
=
B
\mathbf{A}=\mathbf{B}
A=B。
4.假设 A \mathbf{A} A和 B \mathbf{B} B是 m × n m\times n m×n矩阵,如果 A x = B x \mathbf{A}x=\mathbf{B}x Ax=Bx对所有 n × 1 n\times 1 n×1列x都成立,证明 A = B \mathbf{A}=\mathbf{B} A=B

第5题解答

根据矩阵的共轭转置定义以及共轭转置的逆序定律可如下证明:
(
A
∗
A
)
∗
=
A
∗
A
∗
∗
=
A
∗
A
(
A
A
∗
)
∗
=
A
∗
∗
A
∗
=
A
A
∗
(\mathbf{A}^* \mathbf{A})^*=\mathbf{A}^*\mathbf{A}^{*^{*}}=\mathbf{A}^*\mathbf{A}\\ (\mathbf{A} \mathbf{A}^*)^*=\mathbf{A}^{*^{*}}\mathbf{A}^*=\mathbf{A}\mathbf{A}^*
(A∗A)∗=A∗A∗∗=A∗A(AA∗)∗=A∗∗A∗=AA∗
由上可知,
A
∗
A
\mathbf{A}^*\mathbf{A}
A∗A和
A
A
∗
\mathbf{A}\mathbf{A}^*
AA∗为厄密特矩阵。

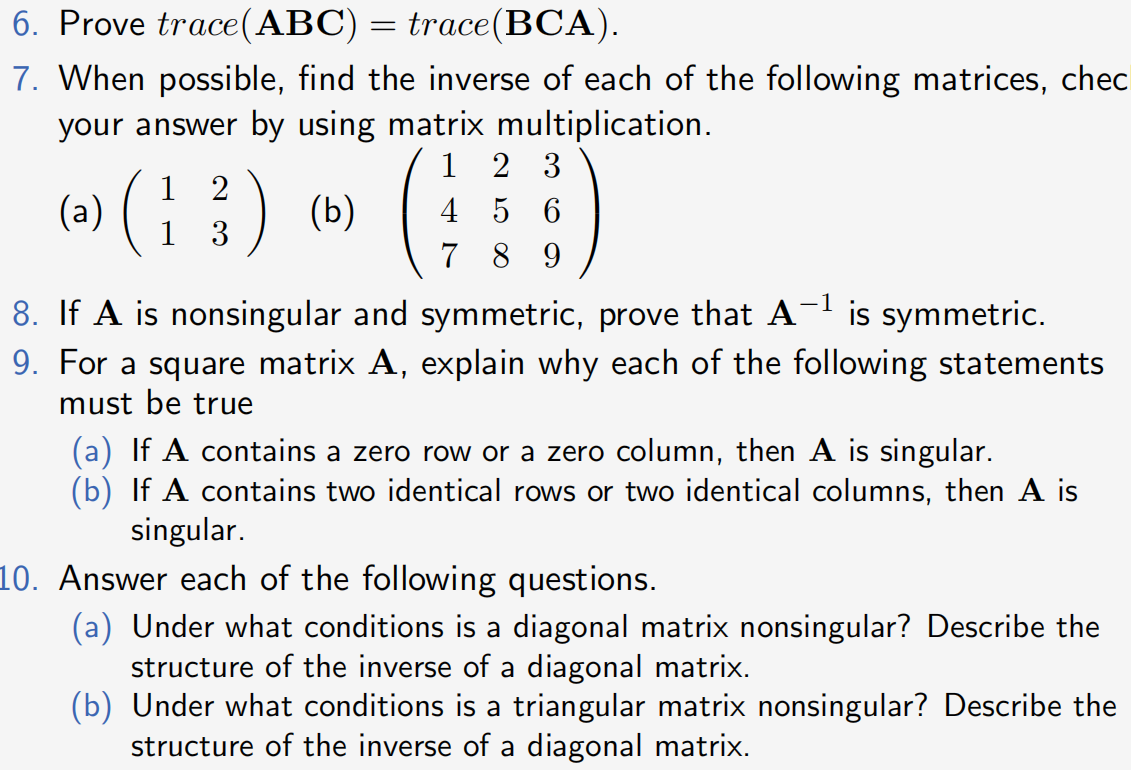
第6题解答

为证该问题,先证明一个子问题
t
r
a
c
e
(
A
B
)
=
t
r
a
c
e
(
B
A
)
trace(\mathbf{A}\mathbf{B})=trace(\mathbf{B}\mathbf{A})
trace(AB)=trace(BA),证明过程如下:
trace
(
A
B
)
=
∑
i
[
A
B
]
i
i
=
∑
i
A
i
∗
B
∗
i
=
∑
i
∑
k
a
i
k
b
k
i
=
∑
i
∑
k
b
k
i
a
i
k
=
∑
k
∑
i
b
k
i
a
i
k
=
∑
k
B
k
∗
A
∗
k
=
∑
k
[
B
A
]
k
k
=
trace
(
B
A
)
\begin{aligned} \operatorname{trace}(\mathbf{A B}) & =\sum_i[\mathbf{A B}]_{i i}=\sum_i \mathbf{A}_{i *} \mathbf{B}_{* i}=\sum_i \sum_k a_{i k} b_{k i}=\sum_i \sum_k b_{k i} a_{i k} \\ & =\sum_k \sum_i b_{k i} a_{i k}=\sum_k \mathbf{B}_{k *} \mathbf{A}_{* k}=\sum_k[\mathbf{B} \mathbf{A}]_{k k}=\operatorname{trace}(\mathbf{B A}) \end{aligned}
trace(AB)=i∑[AB]ii=i∑Ai∗B∗i=i∑k∑aikbki=i∑k∑bkiaik=k∑i∑bkiaik=k∑Bk∗A∗k=k∑[BA]kk=trace(BA)
由矩阵的结合律以及上述证明过的子问题可证明原问题如下:
trace
(
A
B
C
)
=
trace
(
A
(
B
C
)
)
=
trace
(
(
B
C
)
A
)
=
trace
(
B
C
A
)
\operatorname{trace}(\mathbf{A B C})=\operatorname{trace}(\mathbf{A}(\mathbf{B C}))=\operatorname{trace}((\mathbf{B C}) \mathbf{A})=\operatorname{trace}(\mathbf{B C A})
trace(ABC)=trace(A(BC))=trace((BC)A)=trace(BCA)
故原问题得证。

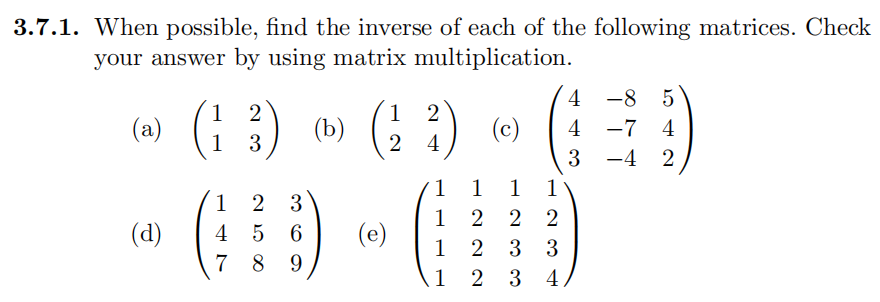
第7题解答
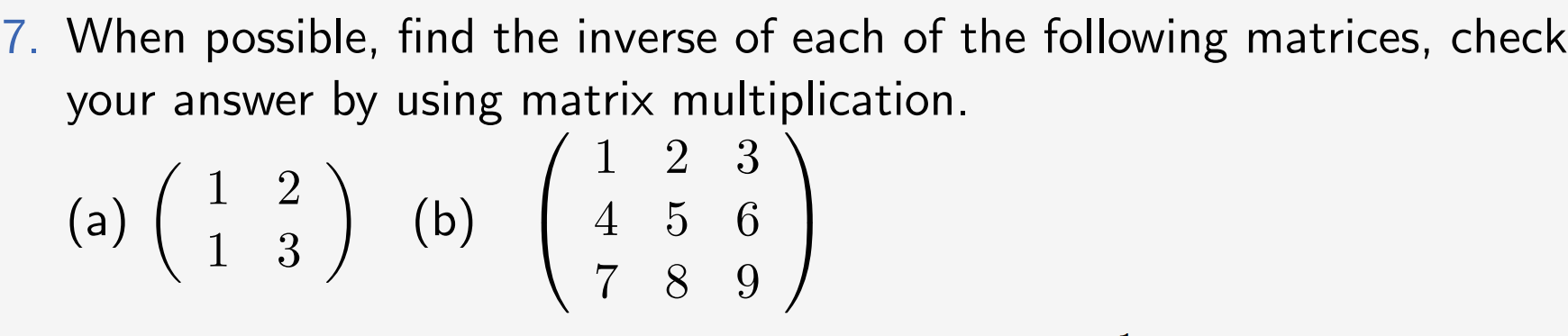
矩阵求逆的过程为 [ A ∣ I ] → Gauss-Jordan [ I ∣ A − 1 ] [\mathbf{A} \mid \mathbf{I}] \xrightarrow{\text { Gauss-Jordan }}\left[\mathbf{I} \mid \mathbf{A}^{-1}\right] [A∣I] Gauss-Jordan [I∣A−1].统一记(a)(b)中的矩阵为 A \mathbf{A} A
(a)题的解答过程如下:
[ A ∣ I ] = ( 1 2 1 0 1 3 0 1 ) → ( 1 2 1 0 0 1 − 1 1 ) → ( 1 0 3 − 2 0 1 − 1 1 ) = [ I ∣ A − 1 ] [\mathbf{A} \mid \mathbf{I}]= \left(\begin{array}{ll|ll} 1 & 2 & 1 & 0 \\ 1 & 3 & 0 & 1 \end{array}\right) \to \left(\begin{array}{ll|ll} 1 & 2 & 1 & 0 \\ 0 & 1 & -1 & 1 \end{array}\right)\to \left(\begin{array}{ll|ll} 1 & 0 & 3 & -2 \\ 0 & 1 & -1 & 1 \end{array}\right)=[\mathbf{I} \mid \mathbf{A}^{-1}] [A∣I]=(11231001)→(10211−101)→(10013−1−21)=[I∣A−1]
故 ( 1 2 1 3 ) \begin{pmatrix} 1&2 \\ 1&3 \end{pmatrix} (1123)的逆矩阵为 ( 3 − 2 − 1 1 ) \begin{pmatrix} 3&-2 \\ -1&1 \end{pmatrix} (3−1−21),利用矩阵乘法验证可知 ( 1 2 1 3 ) ( 3 − 2 − 1 1 ) = ( 1 0 0 1 ) \begin{pmatrix} 1&2 \\ 1&3 \end{pmatrix} \begin{pmatrix} 3&-2 \\ -1&1 \end{pmatrix}= \begin{pmatrix} 1&0 \\ 0&1 \end{pmatrix} (1123)(3−1−21)=(1001)
(b)题的解答过程如下:
[ A ∣ I ] = ( 1 2 3 1 0 0 4 5 6 0 1 0 7 8 9 0 0 1 ) → ( 1 2 3 1 0 0 0 − 3 − 6 − 4 1 0 0 − 6 − 12 − 7 0 1 ) → ( 1 2 3 1 0 0 0 − 3 − 6 − 4 1 0 0 0 0 1 − 2 1 ) → A 是奇异的 [\mathbf{A} \mid \mathbf{I}]= \left(\begin{array}{lll|lll} 1 & 2 & 3 & 1 & 0 & 0\\ 4 & 5 & 6 & 0 & 1 & 0\\ 7 & 8 & 9 & 0 & 0 & 1 \end{array}\right) \to \left(\begin{array}{lll|lll} 1 & 2 & 3 & 1 & 0 & 0\\ 0 & -3 & -6 & -4 & 1 & 0\\ 0 & -6 & -12 & -7 & 0 & 1 \end{array}\right)\\ \to \left(\begin{array}{lll|lll} 1 & 2 & 3 & 1 & 0 & 0\\ 0 & -3 & -6 & -4 & 1 & 0\\ 0 & 0 & 0 & 1 & -2 & 1 \end{array}\right) \to\mathbf{A}是奇异的 [A∣I]= 147258369100010001 → 1002−3−63−6−121−4−7010001 → 1002−303−601−4101−2001 →A是奇异的
7.如果存在的话,求解出如下矩阵的逆矩阵,并通过矩阵乘法检查你的答案
第8题解答

如果
A
\mathbf{A}
A是非奇异的,则
A
\mathbf{A}
A是可逆的,证明过程如下:
(
A
−
1
)
T
=
(
A
T
)
−
1
=
A
−
1
\left(\mathbf{A}^{-1}\right)^T=\left(\mathbf{A}^T\right)^{-1}=\mathbf{A}^{-1}
(A−1)T=(AT)−1=A−1
如果 A \mathbf{A} A是对称的,则 A = A T \mathbf{A}=\mathbf{A}^T A=AT ,那么 A − 1 = ( A T ) − 1 = ( A − 1 ) T \mathbf{A}^{-1}=(\mathbf{A}^T)^{-1}=(\mathbf{A}^{-1})^T A−1=(AT)−1=(A−1)T
8.如果 A \mathbf{A} A是非奇异的并且对称的,证明 A − 1 \mathbf{A}^{-1} A−1是对称的

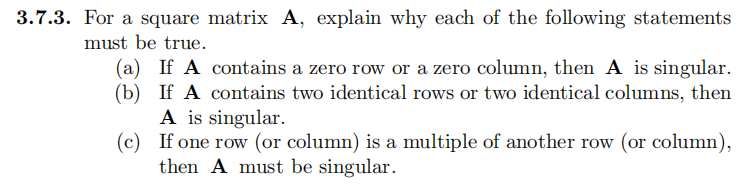
第9题解答

9.对于方阵 A \mathbf{A} A,如果 A \mathbf{A} A有一个零行,由矩阵的逆存在定理可知,不满足rank(A)=n,A不满秩
b也同理,都是rank(A)<n
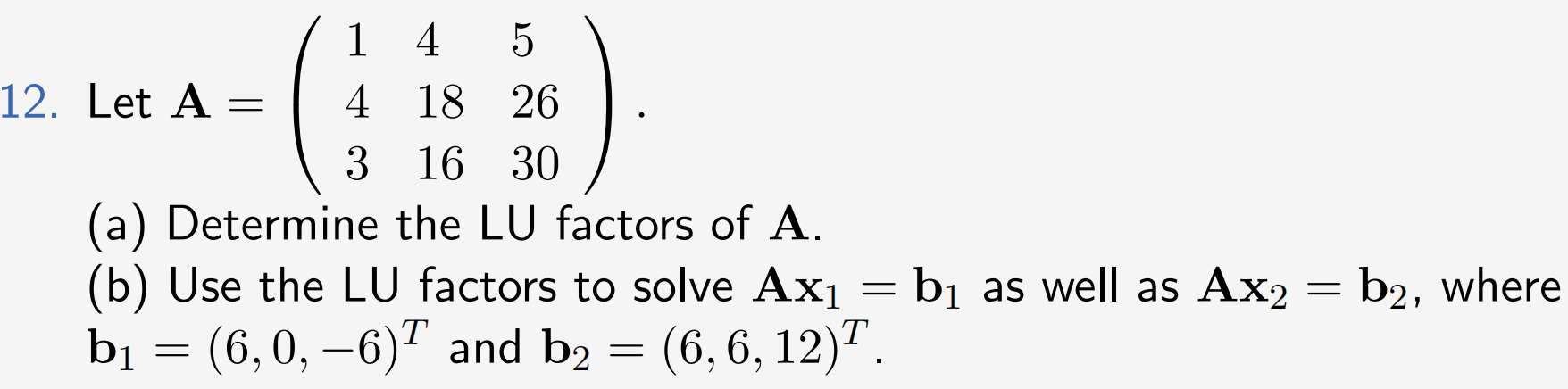
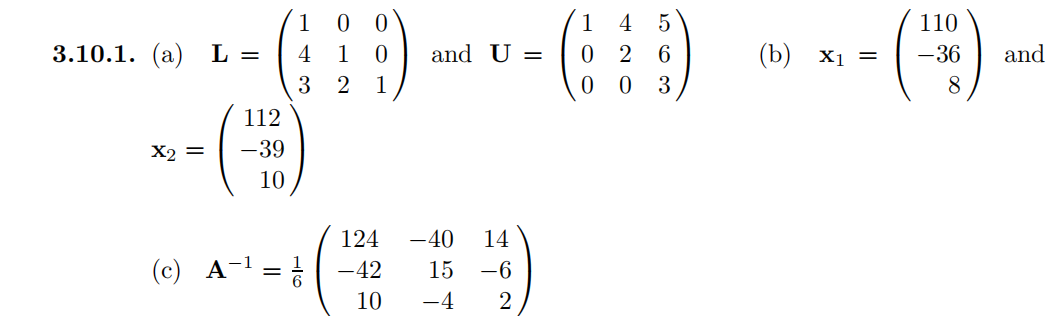
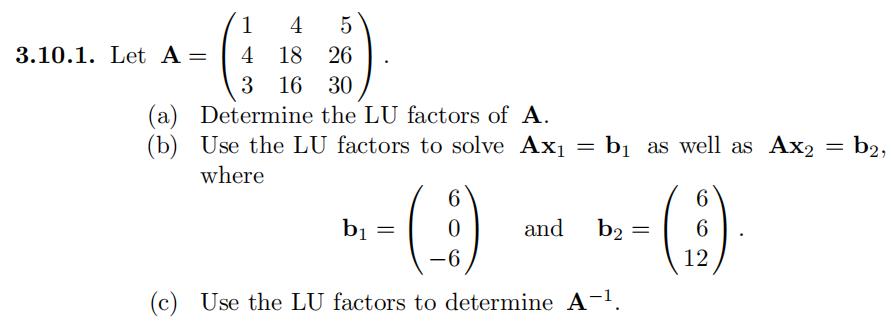
第10题解答

回答下列每个问题。
(a)在什么条件下对角矩阵是非奇异的?描述对角矩阵的逆矩阵的结构。
非奇异的核心论点就是rank(A)=n,A是满秩的,当对角矩阵对角线上的元素都不为零时,对焦矩阵是非奇异的。
对角矩阵 D = ( d 1 0 ⋯ 0 0 d 2 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ d n ) D=\left(\begin{array}{cccc}d_1 & 0 & \cdots & 0 \\ 0 & d_2 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & d_n\end{array}\right) D= d10⋮00d2⋮0⋯⋯⋱⋯00⋮dn ,当其对角线上的元素都不为零时,其是非奇异的,对应的逆矩阵为 D − 1 = ( 1 d 1 0 ⋯ 0 0 1 d 2 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ 1 d n ) D^{-1}=\left(\begin{array}{cccc}\frac{1}{d_1} & 0 & \cdots & 0 \\ 0 & \frac{1}{d_2} & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & \frac{1}{d_n}\end{array}\right) D−1= d110⋮00d21⋮0⋯⋯⋱⋯00⋮dn1
(b)在什么条件下三角矩阵是非奇异的?描述三角矩阵的逆矩阵的结构。
三角矩阵或下三角矩阵主对角线上的元素都不为零时,三角矩阵是非奇异的。


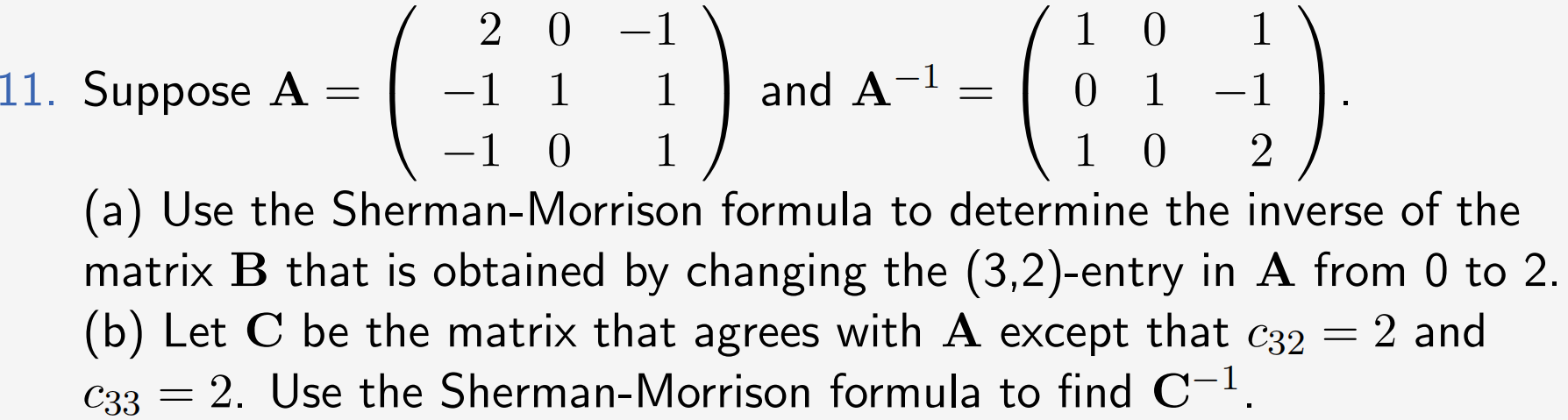
第11题解答
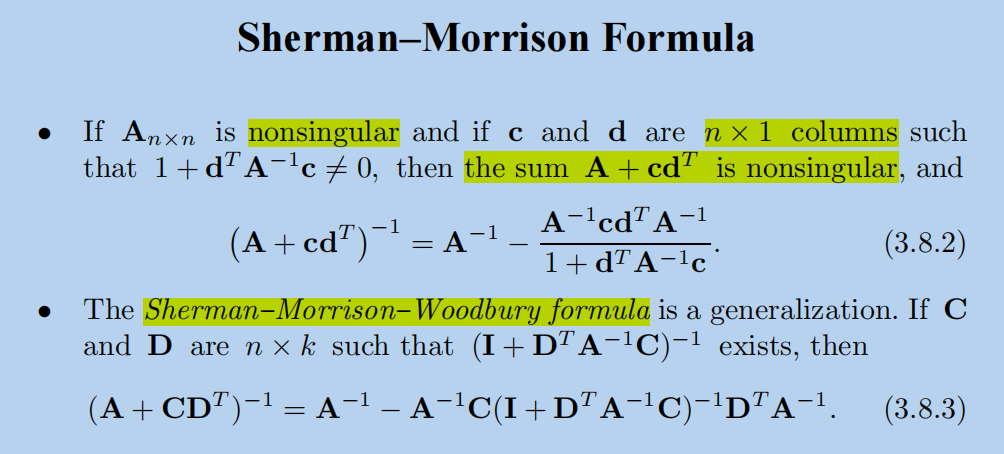
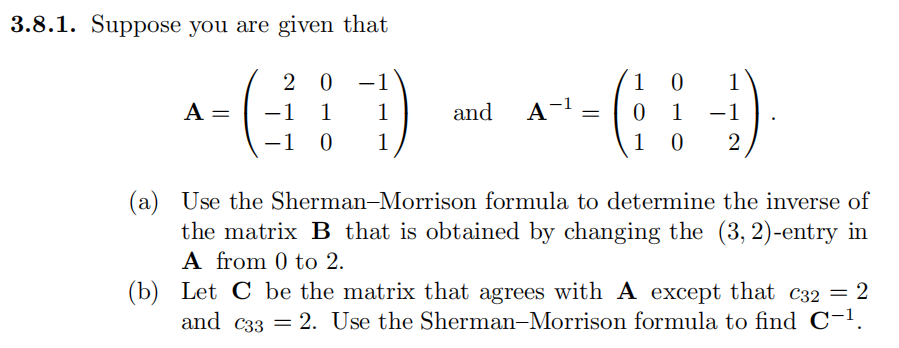
Sherman-Morrison复习
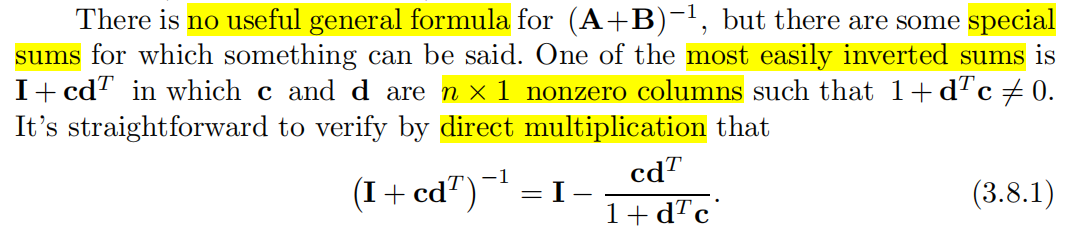
[!NOTE]
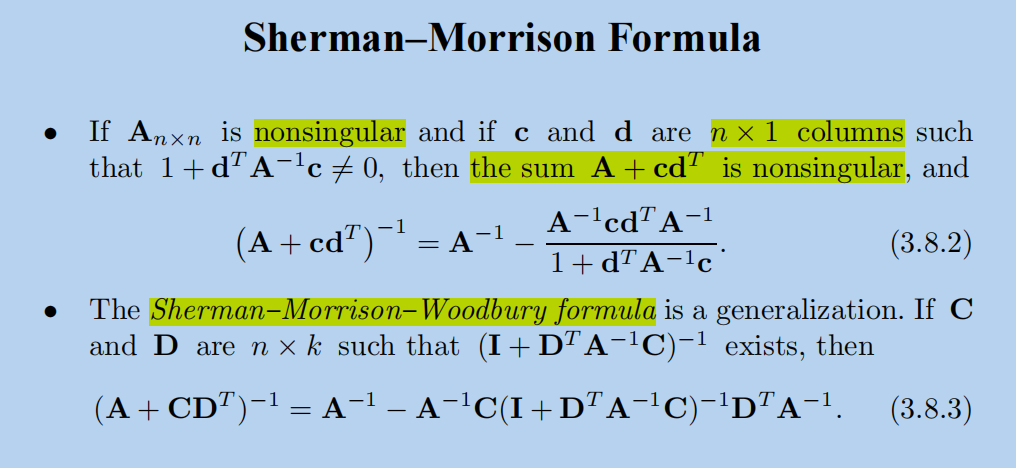
直接搞 ( A + B ) − 1 (\mathbf{A}+\mathbf{B})^{-1} (A+B)−1是没有好用的通用公式,但是有一个特殊和的逆矩阵
( I + c d T ) − 1 = I − c d T 1 + d T c (\mathbf{I}+\mathbf{c}\mathbf{d}^{T})^{-1}=\mathbf{I}-\frac{\mathbf{c}\mathbf{d}^{T}}{1+\mathbf{d}^T\mathbf{c}} (I+cdT)−1=I−1+dTccdT
将A换成I,然后配合矩阵乘积的逆:
(
A
+
c
d
T
)
−
1
=
(
A
(
I
+
A
−
1
c
d
T
)
)
−
1
=
(
I
+
A
−
1
c
d
T
)
−
1
A
−
1
=
(
I
−
A
−
1
c
d
T
1
+
d
T
A
−
1
c
)
A
−
1
=
(
A
−
1
−
A
−
1
c
d
T
A
−
1
1
+
d
T
A
−
1
c
)
(\mathbf{A}+\mathbf{c}\mathbf{d}^{T})^{-1}= (\mathbf{A}(\mathbf{I}+\mathbf{A}^{-1}\mathbf{c}\mathbf{d}^{T}))^{-1} =(\mathbf{I}+\mathbf{A}^{-1}\mathbf{c}\mathbf{d}^{T})^{-1}\mathbf{A}^{-1}\\ =(\mathbf{I}-\frac{\mathbf{A}^{-1}\mathbf{c}\mathbf{d}^{T}}{1+\mathbf{d}^T\mathbf{A}^{-1}\mathbf{c}})\mathbf{A}^{-1} =(\mathbf{A}^{-1}-\frac{\mathbf{A}^{-1}\mathbf{c}\mathbf{d}^{T}\mathbf{A}^{-1}}{1+\mathbf{d}^T\mathbf{A}^{-1}\mathbf{c}})
(A+cdT)−1=(A(I+A−1cdT))−1=(I+A−1cdT)−1A−1=(I−1+dTA−1cA−1cdT)A−1=(A−1−1+dTA−1cA−1cdTA−1)
这被称为Sherman-Morrison秩1更新公式,
r
a
n
k
(
c
d
T
)
=
1
rank(\mathbf{c}\mathbf{d}^{T})=1
rank(cdT)=1
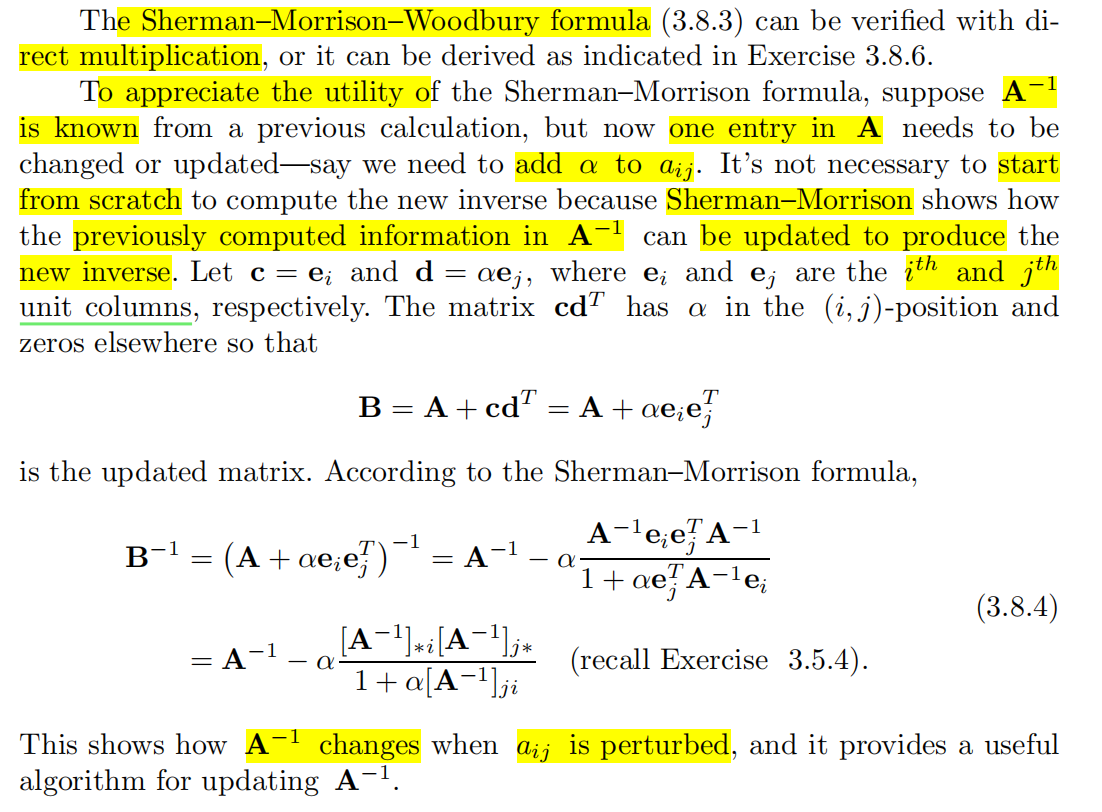
利用上述Sherman-Morrison秩1公式,可以得到:
B
−
1
=
(
A
+
α
e
i
e
j
T
)
−
1
=
A
−
1
−
α
A
−
1
e
i
e
j
T
A
−
1
1
+
α
e
j
T
A
−
1
e
i
=
A
−
1
−
α
[
A
−
1
]
∗
i
[
A
−
1
]
j
∗
1
+
α
[
A
−
1
]
j
i
(recall Exercise 3.5.4)
\begin{aligned} \mathbf{B}^{-1} & =\left(\mathbf{A}+\alpha \mathbf{e}_i \mathbf{e}_j^T\right)^{-1}=\mathbf{A}^{-1}-\alpha \frac{\mathbf{A}^{-1} \mathbf{e}_i \mathbf{e}_j^T \mathbf{A}^{-1}}{1+\alpha \mathbf{e}_j^T \mathbf{A}^{-1} \mathbf{e}_i} \\ & =\mathbf{A}^{-1}-\alpha \frac{\left[\mathbf{A}^{-1}\right]_{* i}\left[\mathbf{A}^{-1}\right]_{j *}}{1+\alpha\left[\mathbf{A}^{-1}\right]_{j i}} \quad \text { (recall Exercise 3.5.4) } \end{aligned}
B−1=(A+αeiejT)−1=A−1−α1+αejTA−1eiA−1eiejTA−1=A−1−α1+α[A−1]ji[A−1]∗i[A−1]j∗ (recall Exercise 3.5.4)
这个公式展示了,当
a
i
j
a_{ij}
aij扰动的时候,
A
−
1
\mathbf{A}^{-1}
A−1如何改变的,并且提供了更新
A
−
1
\mathbf{A}^{-1}
A−1的有用算法。
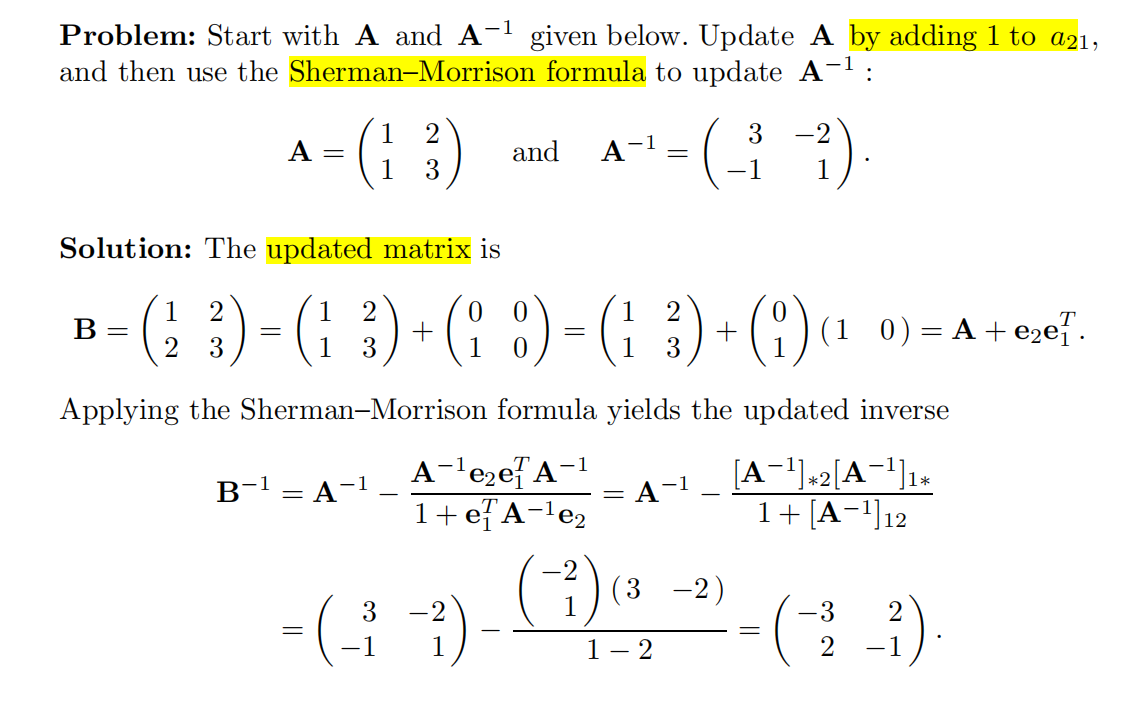
[!NOTE]
上述例题展示了,A有一点儿变化的时候,A-1的变化
第(a)题的解答
更新后的矩阵
B
\mathbf{B}
B为
B
=
(
2
0
−
1
−
1
1
1
−
1
0
1
)
=
(
2
0
−
1
−
1
1
1
−
1
0
1
)
+
(
0
0
0
0
0
0
0
2
0
)
=
(
2
0
−
1
−
1
1
1
−
1
0
1
)
+
2
(
0
0
1
)
(
0
1
0
)
=
A
+
2
e
3
e
2
T
.
\mathbf{B}=\left(\begin{array}{ll} 2 & 0 & -1 \\ -1 & 1 & 1 \\ -1 & 0 & 1 \end{array}\right)=\left(\begin{array}{ll} 2 & 0 & -1 \\ -1 & 1 & 1 \\ -1 & 0 & 1 \end{array}\right)+\left(\begin{array}{ll} 0& 0 & 0 \\ 0 & 0 & 0 \\ 0 & 2 & 0 \end{array}\right)\\=\left(\begin{array}{ll} 2 & 0 & -1 \\ -1 & 1 & 1 \\ -1 & 0 & 1 \end{array}\right)+2 \left(\begin{array}{ll} 0 \\ 0 \\ 1 \\ \end{array}\right) \left(\begin{array}{ll} 0 & 1&0 \end{array}\right)=\mathbf{A}+2\mathbf{e}_3 \mathbf{e}_2^T .
B=
2−1−1010−111
=
2−1−1010−111
+
000002000
=
2−1−1010−111
+2
001
(010)=A+2e3e2T.
B − 1 = ( A + 2 e 3 e 2 T ) − 1 = A − 1 − 2 [ A − 1 ] ∗ 3 [ A − 1 ] 2 ∗ 1 + 2 [ A − 1 ] 23 = ( 2 0 − 1 − 1 1 1 − 1 0 1 ) − ( − 1 1 1 ) ( − 1 1 1 ) 1 + 2 \mathbf{B}^{-1}=\left(\mathbf{A}+2 \mathbf{e}_3 \mathbf{e}_2^T\right)^{-1}\\ =\mathbf{A}^{-1}-2 \frac{\left[\mathbf{A}^{-1}\right]_{* 3}\left[\mathbf{A}^{-1}\right]_{2*}}{1+2\left[\mathbf{A}^{-1}\right]_{23}}\\ =\left(\begin{array}{ll} 2 & 0 & -1 \\ -1 & 1 & 1 \\ -1 & 0 & 1 \end{array}\right)- \frac{\left(\begin{array}{ll} -1 \\ 1 \\ 1 \end{array}\right) \left(\begin{array}{ll} -1 & 1 &1 \end{array}\right) }{1+2} B−1=(A+2e3e2T)−1=A−1−21+2[A−1]23[A−1]∗3[A−1]2∗= 2−1−1010−111 −1+2 −111 (−111)
第12题解答




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











