




 本文详细介绍了PX4飞控系统中的硬件模块,包括V2.4.8和V4版本的硬件结构、接线图,重点讲解了IMU、GPS、气压计等传感器的作用,以及动力系统、遥控器和数传图传的相关知识。此外,还涉及了减震、干扰降噪等飞行关键因素。
本文详细介绍了PX4飞控系统中的硬件模块,包括V2.4.8和V4版本的硬件结构、接线图,重点讲解了IMU、GPS、气压计等传感器的作用,以及动力系统、遥控器和数传图传的相关知识。此外,还涉及了减震、干扰降噪等飞行关键因素。
目录
文章目录
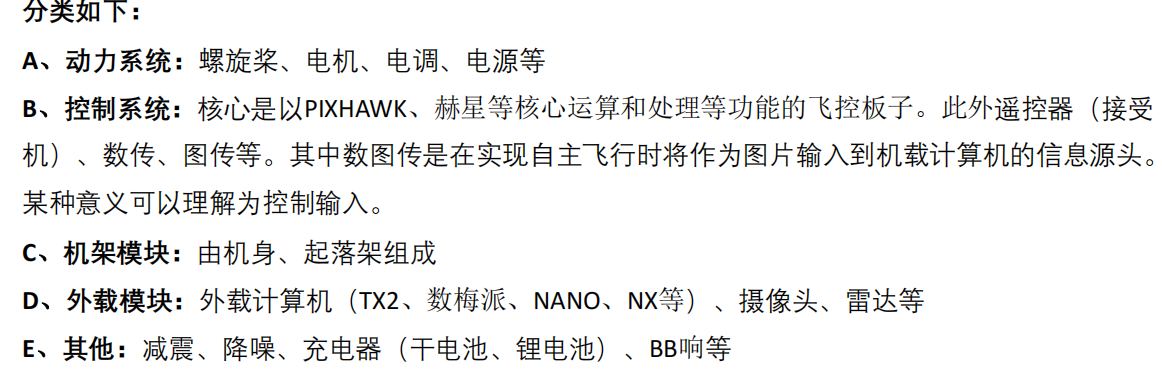
0.PX4相关的硬件模块
1.PIXHAWK硬件V2.4.8和V4
1.1 PIXHAWK V2.4.8硬件图
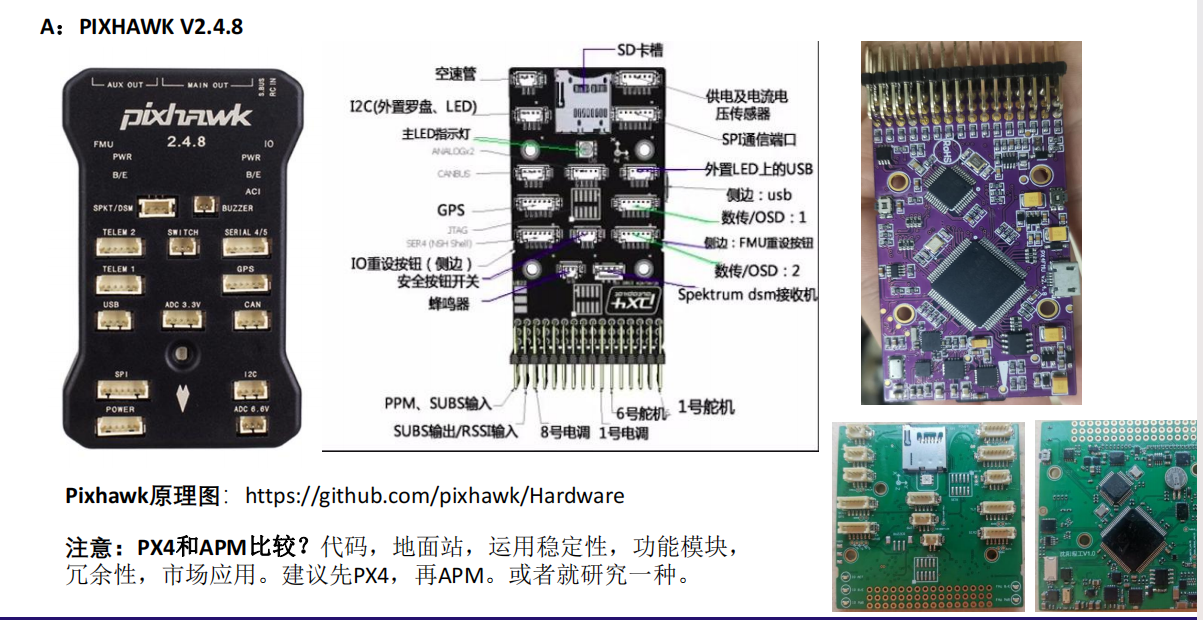
Buzzer蜂鸣器,有不同声音,代表不同的模式
GPS是最重要的模块,外场的定点模式主要依靠GPS模块
SD卡主要存储飞行数据等,相当于黑匣子
PX4与APM的区别如下:
1.代码不同,PX4更规范。2.飞控学习最好从PX4入手,框架,姿态解算与控制,commander等。3.APM飞控稳定性更高一些。4.APM的功能模块更稳定,PX4对ROS的支持更好。5.APM的冗余性更强
1.2 PIXHAWK V2.4.8 实际连接飞机的接线图
1、电流计正常才可在QGC校准电压
2、电调接口,负、正、信,电源5V
3、BB响连接电池,保护电池>=3.7V
4、在QGC设置定点模式,室外GPS数目达到要求,蜂鸣器会响 .
1.3 PIXHAWK V2.4.8实际连接飞机时的引脚定义

“负-正-信”。辅助通道(控制舵机那种)与主通道。V4版本的硬件不再有正负
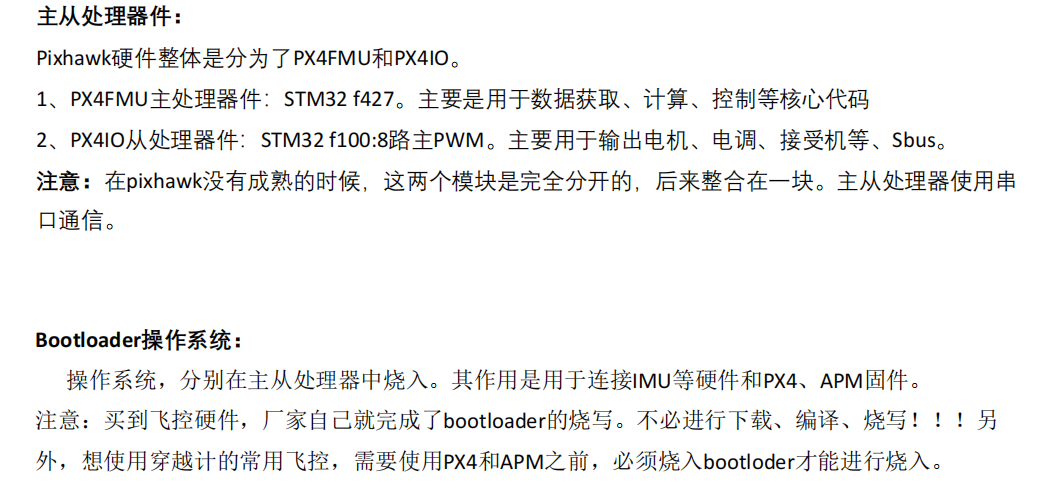
🚶PX4FMU主处理器和PX4IO从处理器。Bootloader加载主从处理器
[!IMPORTANT]
1.PX4FMU主处理器,主要用于数据获取、计算、控制等核心代码
2.PX4IO从处理器,主要用于输出带电机、电调、接收机、SBUS等
[!NOTE]
1.Bootloader主要用于连接IMU等硬件以及初始化PX4、APM固件
2.一般来说,个人用户不需要进行bootloader的烧写,下载和编译
1.4 PIXHAWK V4 硬件图

1.5 PIXHAWK V4 实际连接飞机的接线图
多旋翼飞行器设计与控制·Pixhawk4以及外部设备接线(笔记004)
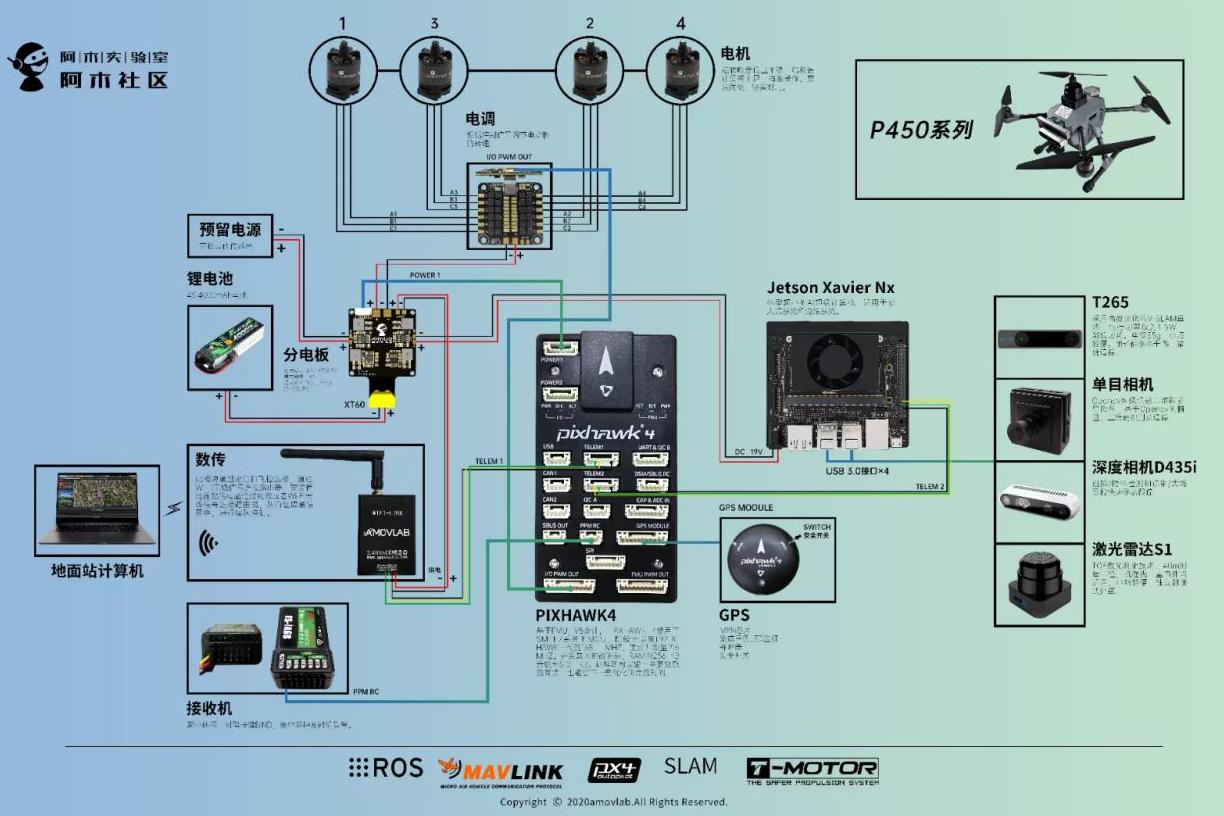
[!IMPORTANT]
1.分电板上可以引出给机载计算平台供电的接口
2.数传模块的接口是固定的,telem1不需要配置
3.RC与PPM与SBUS的连接
2.IMU惯性测量单元(以V2.4.8为例)
2.1 机载的双IMU设计
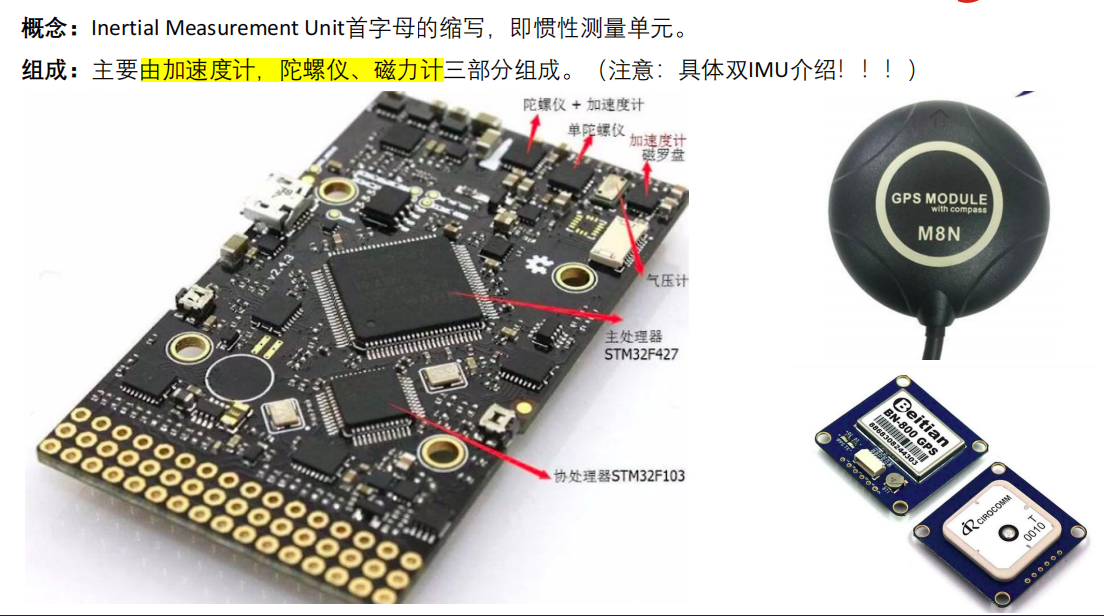
对应的型号:
Invensense MPU6000 三轴加速度计/陀螺仪
ST Micro L3GD20 16位陀螺仪
ST Micro LSM303D 14位加速度计/磁力计
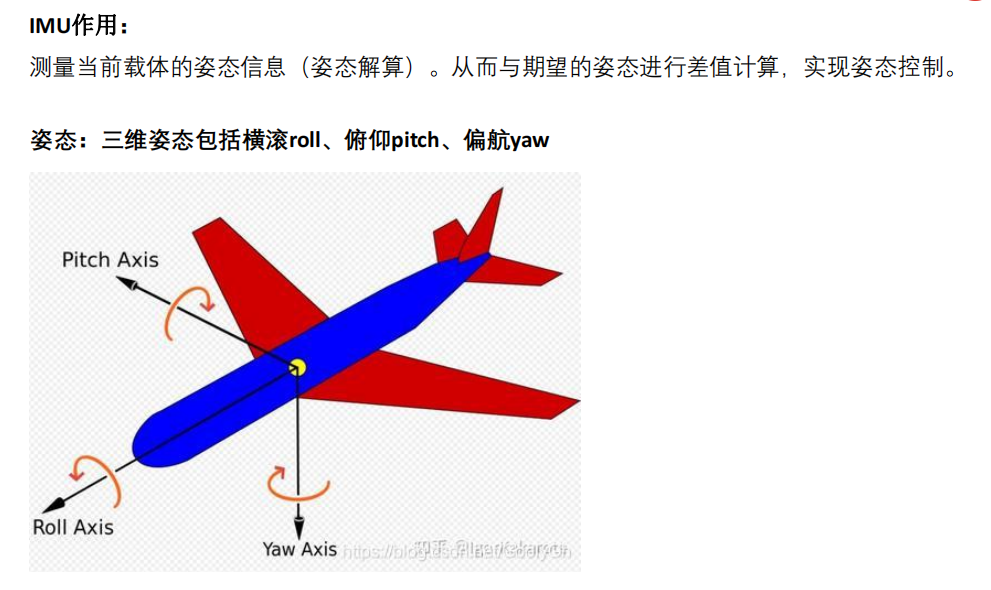
2.2 IMU的作用
 |  |
|---|
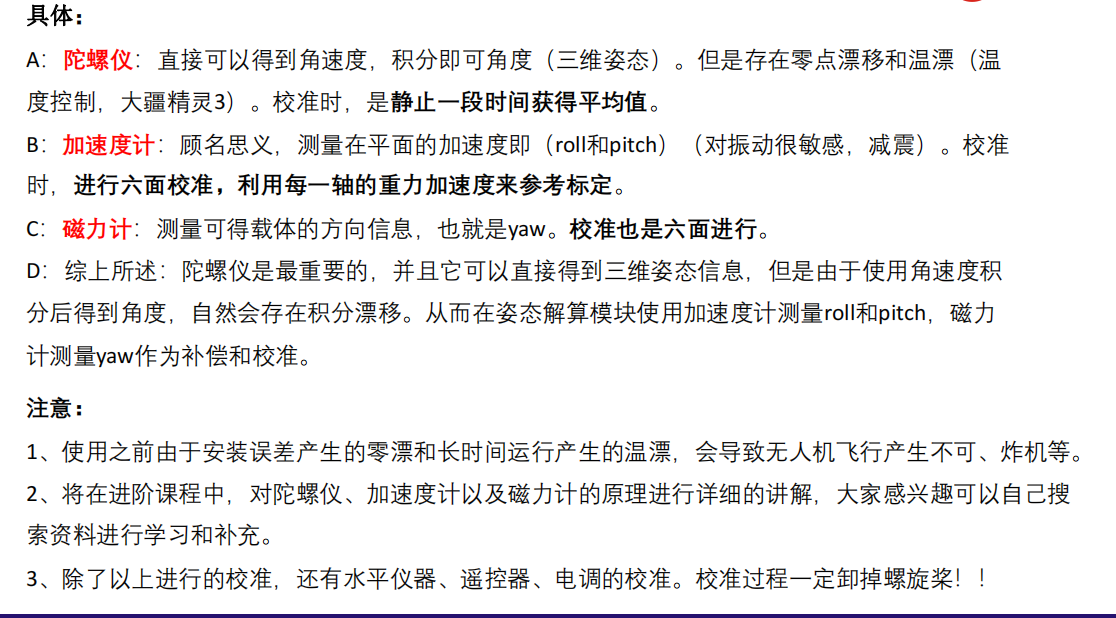
[!NOTE]
1.使用之前由于安装误差产生的零漂和长时间运行产生的温漂,会导致无人机飞行产生不可、炸机等
2.除了以上进行的校准,还有水平仪器、遥控器、电调的校准。校准过程一定卸掉螺旋桨
3.GPS、气压计、TFmini、PX4flow、MOCAP、UWB、RTK

[!NOTE]
1.GPS模块
2.激光测距模块
3.PX4flow模块
4.气压计模块
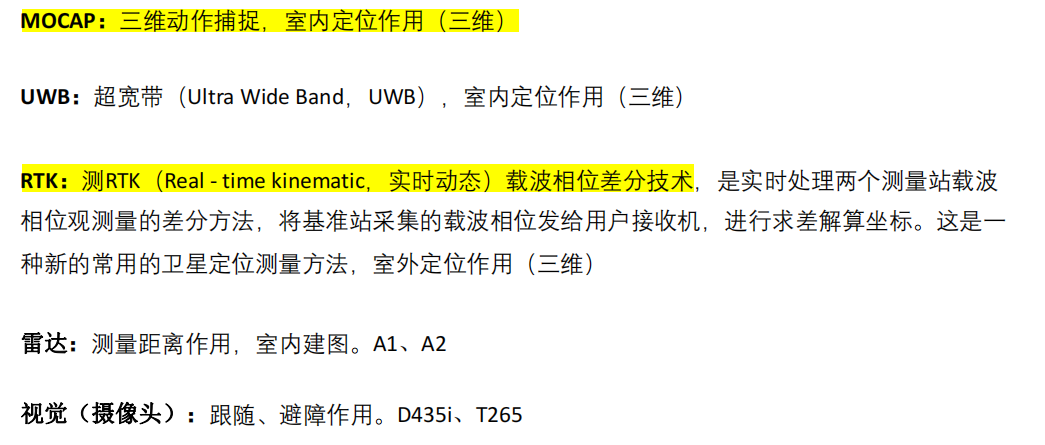
[!NOTE]
1.MOCAP等三维动捕
2.UWB室内定位
3.RTK室外定位
4.雷达测距建图
5.视觉跟随避障
4.动力系统、机架、遥控器(接收机)、数传图传

[!NOTE]
飞飞机之前,最好要仿真,否则要电调过热。
设置最小飞行电压,设置安全参数,设置总开关。


[!NOTE]
1.数传:点对点数传、WIFI数传
2.图传:阿木实验室Homer图数传
5.减震装置、飞控干扰、降噪、其他
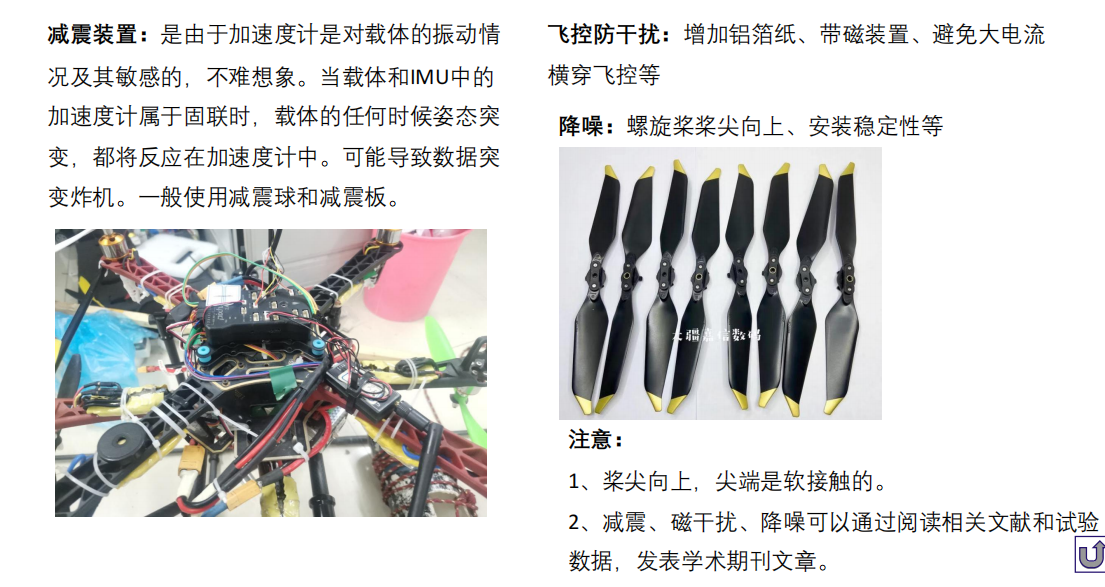
[!IMPORTANT]
1.使用减震球和减震板去耦合掉加速度计和飞控的固联耦合
2.飞控防干扰:大电流横穿飞控会对飞控有影响
3.降噪:桨叶的桨尖向上,桨叶要安装稳定



















 7785
7785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











