







Harris角点检测算法
一、算法原理
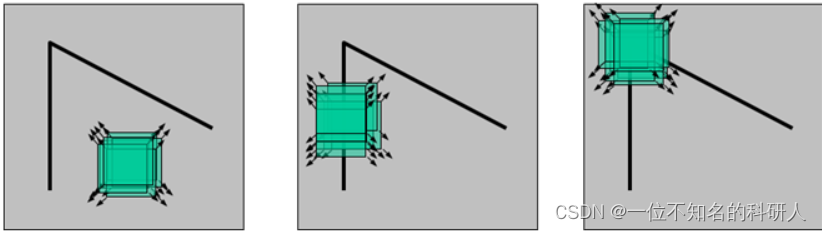
哈里斯角点是在任意方向上移动(u,v),都会有很明显的变化。如下图一个局部很小的区域,如果是在图片区域中移动灰度值没有变化,那么窗口内不存在角点。如果在某一个方向上移动,一个发生很大变化而另一侧没有变化,那么说明这个区域是位于该对象的边缘区域。
二、代码
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
"""
Example of detecting Harris corner points (Figure 2-1 in the book).
"""
import PCV
# 读入图像
im = array(Image.open('1.jpg' 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











