







 文章通过MATLAB程序分别绘制了汽车横摆角速度增益与速度曲线、前后轮侧偏角之差与侧向加速度曲线以及转向半径比值与速度平方曲线,同时计算了汽车的稳定性因数和静态储备系数,展示了汽车在不同工况下的动态性能。
文章通过MATLAB程序分别绘制了汽车横摆角速度增益与速度曲线、前后轮侧偏角之差与侧向加速度曲线以及转向半径比值与速度平方曲线,同时计算了汽车的稳定性因数和静态储备系数,展示了汽车在不同工况下的动态性能。
汽车稳态响应特性是指汽车稳态状况下的运动响应,其评价指标主要有汽车稳态横摆角速度增益、汽车稳定性因数、前后轮侧偏角之差、转向半径比值、静态储备系数。
主要任务:
(1)绘制汽车横摆角速度增益与速度曲线
(2)绘制汽车前后轮侧偏角之差与侧向加速度曲线
(3)绘制汽车转向半径比值与速度平方曲线
(4)计算汽车稳定性因数和静态储备系数
汽车稳态响应特性仿真所需参数见表4-1。
| 表4-1 汽车稳态响应特性仿真所需参数 | ||
| 汽车质量/kg | 汽车转动惯量/kg ·m² | 汽车质心至前轴距离/m |
| 3018 | 10437 | 1.84 |
| 汽车质心至后轴距离/m | 前轮综合侧偏刚度/(N/rad) | 后轮综合侧偏刚度/(N/rad) |
| 1.88 | -23147 | -38318 |
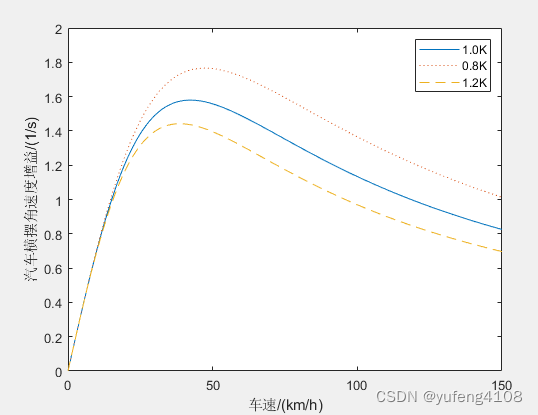
1. 绘制汽车横摆角速度增益与速度曲线
编写绘制汽车横摆角速度增签与速度曲线的MAT程序如下。
m=3018;I=10437;a=1.84;b=1.88; %汽车参数赋值
k1=-23147;k2=-38318; %轮胎侧偏刚度赋值
k=m./(a+b).^2.*(a./k2-b./k1); %计算稳定性因数
u=0:1:150; %定义速度范围
w1=u./3.6./(a+b)./(1+k.*u.*u./3.6/3.6); %计算汽车横摆角速度增益
plot(u,w1) %绘制汽车横摆角速度增益曲线
hold on %保存图形
w2=u./3.6./(a+b)./(1+0.8*k*u.*u./3.6./3.6); %计算汽车横摆角速度增益
plot(u,w2,':') %绘制汽车横摆角速度增益曲线
hold on %保存图形
w3=u./3.6./(a+b)./(1+1.2*k*u.*u./3.6./3.6); %计算汽车横摆角速度增益
plot(u,w3,'--') %绘制汽车横摆角速度增益曲线
hold on %保存图像
axis([0,150,0,2]) %定义坐标轴范围
xlabel('车速/(km/h)') %x轴标注
ylabel('汽车横摆角速度增益/(1/s)') %y轴标注
legend('1.0K','0.8K','1.2K') %曲线标注仿真运行结果如下:
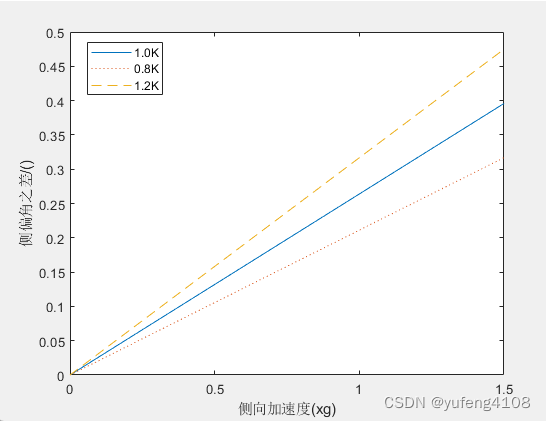
2. 绘制汽车前后轮侧偏角之差与侧向加速度曲线
编写绘制汽车前后轮侧偏角之差与侧向加速度曲线的 MATLAB程序如下。
m=3018;I=10437;a=1.84;b=1.88; %汽车参数赋值
k1=-23147;k2=-38310; %轮胎侧偏刚度赋值
k=m./(a+b).^2.*(a./k2-b./k1); %计算稳定性因数
ay=0:0.05:1.5; %定义侧向加速度范围
al_a2=(a+b).*k.*ay*9.8; %计算汽车前后侧偏角之差
plot(ay,al_a2) %绘制汽车前后侧偏角之差
hold on %保存图形
all_a22=(a+b).* 0.8*k.*ay*9.8; %计算汽车前后侧偏角之差
plot(ay,all_a22,':') %绘制汽车前后侧偏角之差
hold on %保存图形
alll_a222=(a+b).* 1.2* k.*ay* 9.8; %计算汽车前后侧偏角之差
plot(ay,alll_a222,'--') %绘制汽车前后侧偏角之差
hold on %保存图形
xlabel('侧向加速度(xg)') %x轴标注
ylabel('侧偏角之差/()') %y轴标注
legend('1.0K','0.8K','1.2K') %曲线标注仿真结果如下图所示:
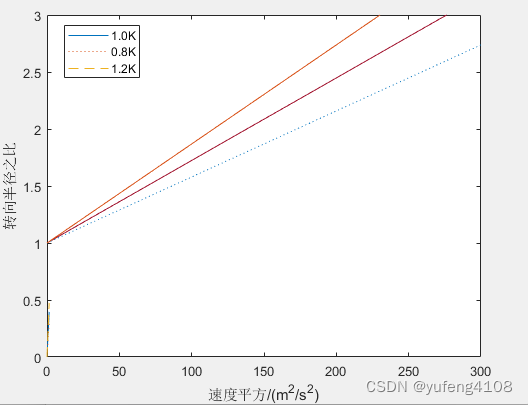
3. 绘制汽车转向半径比值与速度平方曲线
编写绘制汽车转向半径比值与速度平方曲线的MATLAB程序如下。
m=3018;I=10437;a=1.84;b=1.88; %汽车参数赋值
kl=-23147;k2=-38318; %轮胎侧偏刚度赋值
k=m./(a+b).^2.*(a./k2-b./k1); %计算稳定性因数
u=0:1:20; %定义速度范围
R1=1+k*u.^2; %计算汽车转向半径比值
axis([0 300 0 3]) %设置坐标轴范围
plot(u.^2,R1) %绘制汽车转向半径比值
hold on %保存图形
R2=1+0.8*k*u.^2; %计算汽车转向半径比值
plot(u.^2,R2,':') %绘制汽车转向半径比值
hold on %保存图形
R3=1+1.2*k*u.^2; %计算汽车转向半径比值
plot(u.^2,R3,'-') %绘制汽车转向半径比值
hold on %保存图形
xlabel('速度平方/(m^2/s^2)') %x轴标注
ylabel('转向半径之比') %y轴标注
legend('1.0K', '0.8K','1.2K') %曲线标注 仿真结果如图所示
4. 计算汽车稳定性因数和静态储备系数
编写计算汽车稳定性因数和静态储备系数的MATLAB程序如下。
m=3018;I=10437;a=1.84;b=1.88; %汽车参数赋值
k1=-23147;k2=-38318; %轮胎侧偏刚度赋值
k=m/(a+b)^2*(a/k2-b/k1);%计算稳定性因数
SM=k2/(kl+k2)-a/(a+b);%计算静态储备系数
fprintf('汽车稳定性因数K=%.4f\n',k) %汽车稳定性因数输出
fprintf('汽车静态储备系数S.M.=%.4f\n',SM) %汽车静态储备系数输出仿真结果如下图所示
![]()

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









