







src/mathutils/mathutils.c:79:9: error: too many arguments to function ‘_Py_HashDouble’
79 | y = _Py_HashDouble(NULL, (double)(array[i++]));
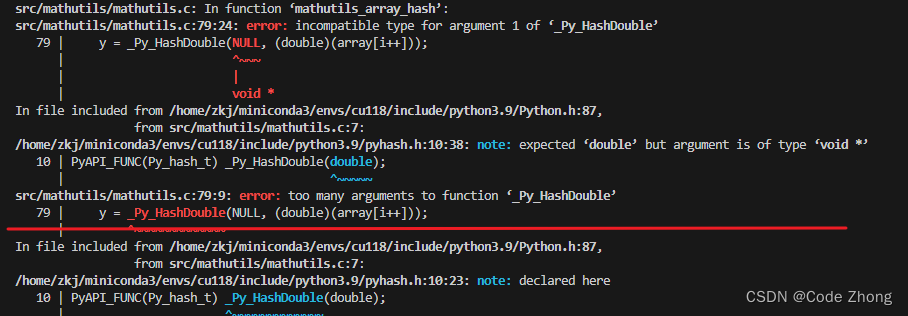
将mathutils.c的第79行: y = _Py_HashDouble(NULL, (double)(array[i++]));
修改为:y = _Py_HashDouble( (double)(array[i++]) );















 4074
4074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









