







-
写在前面:
WeThinkIn (公主号)
学习经验分享

目录
1、机器学习基础
2、深度学习基础
2.1 1*1卷积的作用
注:卷积核的个数对应输出的通道数(channels),比如输入6*6*64,卷积核1*1*32,输出为6*6*32
- 实现特征信息的交互与融合。3x3,64channels的卷积核后面添加一个1x1,28channels的卷积核,就变成了3x3,28channels的卷积核,原来的64个channels就可以理解为跨通道线性组合变成了28 channels,这就是通道间的信息交互。
- 对特征通道数进行升维和降维,降维时可以减少参数量。由于 1×1 并不会改变 height 和 width,改变通道的第一个最直观的结果,就是可以将原本的数据量进行增加或者减少。
- 利用后面加激活函数增加非线性。保持特征图尺寸不发生变化,在增加网络深度的同时使网络学习更复杂的函数(特征信息)。

2.2 卷积核的大小如何选择
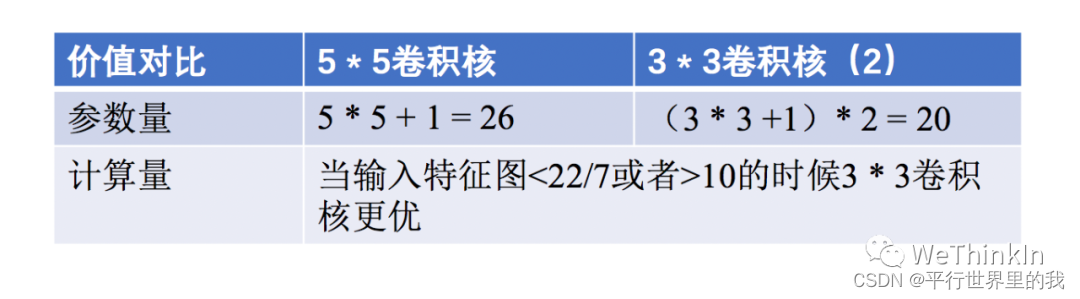
最常用的是3 * 3大小的卷积核,两个3 * 3卷积核和一个5 * 5卷积核的感受野相同,但是减少了参数量和计算量,加快了模型训练。与此同时由于卷积核的增加,模型的非线性表达能力大大增强。
不过大卷积核(7 * 7,9 * 9)也有使用的空间,在GAN,图像超分辨率,图像融合等领域依然有较多的应用。
注:感受野的计算:


- 例如:初始1*1——>经过3*3,得到(3-1)*1+1=3;——>在经过3*3得到(3-1)*1+3=5;
- 初始1*1——>经过5*5得到(5-1)*1+1=5
所以。一个 5×5 卷积的感受野等于两个 3×3 卷积堆叠的感受野。一个 7×7 卷积的感受野等于三个 3×3 卷积堆叠的感受野。
每个卷积层的参数量计算如下:

每个卷积层的运算量计算如下:

3、AI绘画基础 (图像处理)
3.1 图像二值化的相关概念
图像二值化( Image Binarization)是将图像像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。二值图像每个像素只有两种取值:要么纯黑0,要么纯白255。
一张图片包含目标物体还有噪声和背景等;通过二值图像,将感兴趣目标和背景分离,能更好地分析物体的形状和轮廓。
图像二值化的方法有很多,其中最经典的就是采用阈值法(Thresholding)进行二值化。阈值法是指选取一个数字,大于它就设为白色,小于它就设为黑色。根据阈值选取方式的不同,又可以分为全局阈值和局部阈值。全局阈值(Global Method),指的是对整个图像中的每一个像素都选用相同的阈值。局部阈值(Local Method)又称自适应阈值(Adaptive Thresholding)。局部阈值法假定图像在一定区域内受到的光照比较接近。它用一个滑窗扫描图像,并取滑窗中心点亮度与滑窗内其他区域(称为邻域, neighborhood area)的亮度进行比较。如果中心点亮度高于邻域亮度,则将中心点设为白色,否则设为黑色。
3.2 图像膨胀腐蚀的相关概念
图像的膨胀(dilation)和腐蚀(erosion)是两种基本的形态学运算,主要用来寻找图像中的极大区域和极小区域。
膨胀类似于“领域扩张”,将图像的高亮区域或白色部分进行扩张,其运行结果图比原图的高亮区域更大。
腐蚀类似于“领域被蚕食”,将图像中的高亮区域或白色部分进行缩减细化,其运行结果图比原图的高亮区域更小。
3.3 高斯滤波的相关概念
图像为什么要滤波呢?一是为了消除图像在数字化过程中产生或者混入的噪声。二是为了提取图片对象的特征作为图像识别的特征模式。
什么是高斯噪声?首先,噪声在图像当中常表现为引起较强视觉效果的孤立像素点或像素块。简单来说,噪声的出现会给图像带来干扰,让图像变得不清楚。 高斯噪声就是它的概率密度函数服从高斯分布(即正态分布)的一类噪声。如果一个噪声,它的幅度分布服从高斯分布,而它的功率谱密度又是均匀分布的,则称它为高斯白噪声。
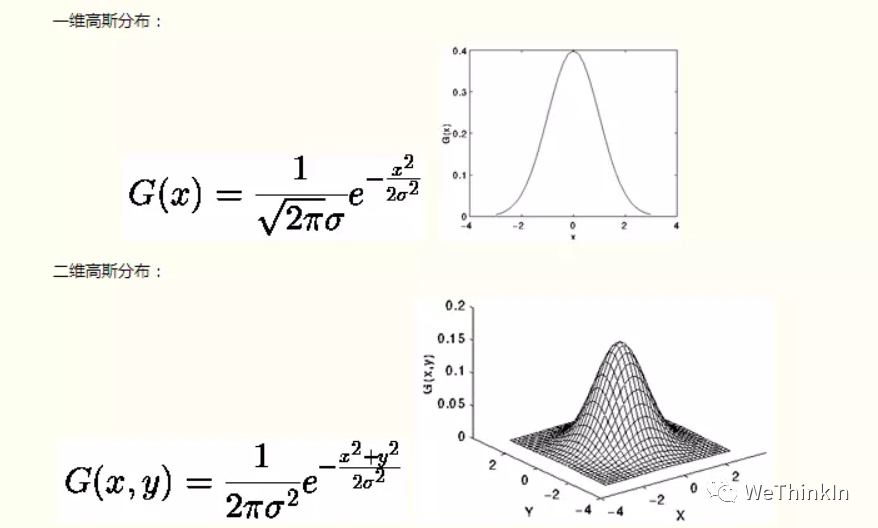
高斯滤波是一种线性平滑滤波,可以用来消除高斯噪声。其公式如下所示
高斯滤波过程: 假设高斯核:
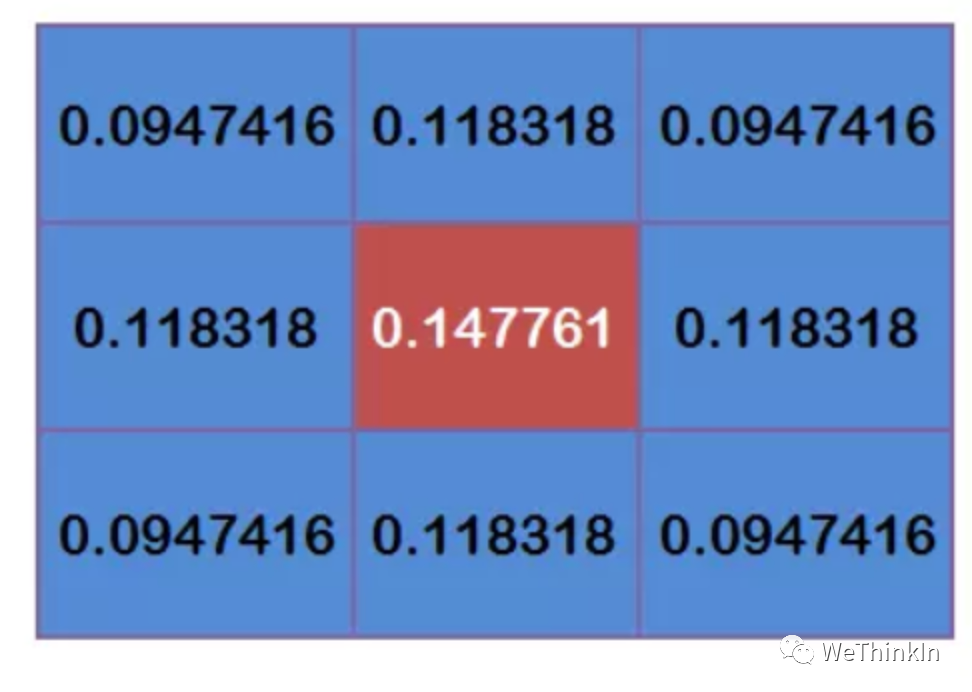
那么高斯滤波计算过程就如下所示:

将这9个值加起来,就是中心点的高斯滤波的值。对所有点重复这个过程,就得到了高斯模糊后的图像。
二维高斯滤波能否分解为一维操作?可以进行分解,二维高斯滤波分解为两次一维高斯滤波,高斯二维公式可以推导为X轴与Y轴上的一维高斯公式。即使用一维高斯核先对图像逐行滤波,再对中间结果逐列滤波。
3.4 中值滤波和均值滤波的概念
均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点$(x,y)$,选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点$(x,y)$,作为处理后图像在该点上的灰度值$g(x,y)$,即$g(x,y)=\frac{1}{m} \Sigma f(x,y)$, $m$为该模板中包含当前像素在内的像素总个数。这样的方法可以平滑图像,速度快,算法简单。但是无法去掉噪声,但能微弱的减弱它。
就是求平均值作为滤波值
中值滤波是一种非线性平滑技术,它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。具体实现过程如下:
- 通过从图像中的某个采样窗口取出奇数个数据进行排序。
- 用排序后的中值作为当前像素点的灰度值。
- 在图像处理中,中值滤波常用来保护边缘信息,是经典的平滑噪声的方法,该方法法对消除椒盐噪音非常有效,在光学测量条纹图象的相位分析处理方法中有特殊作用,但在条纹中心分析方法中作用不大。
就是求中值作为滤波。

3.5 图像高/低通滤波的相关概念
滤波操作是一种非常实用的图像数据预处理方法。滤波是一个信号处理领域的概念,而图像本身也可以看成是一个二维的信号,其中像素点数值的高低代表信号的强弱。
其中图像信息可以分为高频和低频两个维度:
高频:图像中灰度变化剧烈的点,一般是图像轮廓或者是噪声。
低频:图像中平坦的、变化不大的点,也就是图像中的大部分区域。
根据图像的高频与低频的特征,我们可以设计相应的高通与低通滤波器,高通滤波器可以检测保留图像中尖锐的、变化明显的地方。而低通滤波器可以让图像变得更光滑,去除图像中的噪声。
常见的低通滤波器有:线性的均值滤波器、高斯滤波器、非线性的双边滤波器、中值滤波器。
常见的高通滤波器有:Canny算子、Sobel算子、拉普拉斯算子等边缘滤波算子。
3.6 图像中低频信息和高频信息的定义
低频信息(低频分量):表示图像中灰度值变化缓慢的区域,对应着图像中大块平坦的区域。
高频信息(高频分量):表示图像中灰度值变化剧烈的区域,对应着图像的边缘(轮廓)、噪声(之所以说噪声也是高频分量,是因为图像噪声在大部分情况下都是高频的)以及细节部分。
低频分量主要对整幅图像强度的综合度量。高频分量主要对图像边缘和轮廓的度量(人眼对高频分量比较敏感)。
傅立叶变换角度理解:从傅立叶变换的角度,我们可以将图像从灰度分布转化为频率分布。图像进行傅立叶变换之后得到的频谱图,就是图像梯度的分布图。具体来说,傅立叶频谱图上我们能看到明暗不一的亮点,实际上就是图像上某一点与领域点差异的强弱,即梯度的大小。如果一幅图像的各个位置的强度大小相等,则图像只存在低频分量。从图像的频谱图上看,只有一个主峰,且位于频率为零的位置。如果一幅图像的各个位置的强度变化剧烈,则图像不仅存在低频分量,同时也存在多种高频分量。从图像的频谱上看,不仅有一个主峰,同时也存在多个旁峰。图像中的低频分量就是图像中梯度较小的部分,高频分量则相反。
3.7 边缘检测的相关概念
图像边缘是图像最基本的特征,指图像局部特征的不连续性。图像特征信息的突变处称之为边缘,例如灰度级的突变,颜色的突变,纹理结构的突变等。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。

当我们看到一个有边缘的物体时,首先感受到的就是边缘。
上图(a)是一个理想的边缘所具备的特性。每个灰度级跃变到一个垂直的台阶上。而实际上,在图像采集系统的性能、采样率和获取图像的照明条件等因素的影响,得到的边缘往往是模糊的,边缘被模拟成具有“斜坡面”的剖面,如上图(b)所示,在这个模型中,模糊的边缘变得“宽”了,而清晰的边缘变得“窄”了。
图像的边缘有方向和幅度两种属性。边缘通常可以通过一阶导数或二阶导数检测得到。一阶导数是以最大值作为对应的边缘的位置,而二阶导数则以过零点作为对应边缘的位置。
常用的一阶导数边缘算子:Roberts算子、Sobel算子和Prewitt算子。
常用的二阶导数边缘算子:Laplacian 算子,此类算子对噪声敏感。
其他边缘算子:前面两类均是通过微分算子来检测图像边缘,还有一种就是Canny算子,其是在满足一定约束条件下推导出来的边缘检测最优化算子。
3.8 一阶微分梯度算子
Roberts算子
Roberts算子利用局部差分算子寻找边缘,边缘定位精度较高,但容易丢失一部分边缘,不具备抑制噪声的能力。该算子对具有陡峭边缘且含噪声少的图像效果较好,尤其是边缘正负45度较多的图像,但定位准确率较差。
Sobel算子
Sobel算子考虑了综合因素,对噪声较多的图像处理效果更好,Sobel 算子边缘定位效果不错,但检测出的边缘容易出现多像素宽度。
Prewitt算子
Prewitt算子对灰度渐变的图像边缘提取效果较好,而没有考虑相邻点的距离远近对当前像素点的影响,与Sobel 算子类似,不同的是在平滑部分的权重大小有些差异。
3.9 二阶微分算子-拉普拉斯算子
拉普拉斯算子是一个二阶算子,比起一阶微分算子,二阶微分算子的边缘定位能力更强,锐化效果更好。
使用二阶微分算子的基本方法是定义一种二阶微分的离散形式,然后根据这个形式生成一个滤波模版,与图像进行卷积。
滤波器分各向同性滤波器和各向异性滤波器。各向同性滤波器与图像进行卷积时,图像旋转后响应不变,说明滤波器模版自身是对称的。如果是各向异性滤波器,当原图旋转90度时,原图某一点能检测出细节(突变)的,但是现在却检测不出来了,这说明滤波器不是对称的。由于拉普拉斯算子是最简单的各向同性微分算子,它具有旋转不变形。
3.10 图像噪声的种类
常规噪声
- 高斯噪声
- 脉冲噪声
- 泊松噪声
- 乘性噪声
- 瑞利噪声
- 伽马噪声
- 指数噪声
- 均匀噪声
- 椒盐噪声
- 散粒噪声
- 泊松噪声
对抗噪声
- 白盒对抗噪声
- 黑盒查询对抗噪声
- 黑盒迁移噪声
- 物理对抗噪声
3.11 有哪些常用的图像去噪算法
- 空间域去噪:均值滤波器,中值滤波器,低通滤波器,高斯滤波,双边滤波,引导滤波,NLM(Non-Local means)算法等。
- 频域去噪:小波变换,傅里叶变换,离散余弦变换,形态学滤波等。
3.12 有哪些常用的图像频域信息分离方法
可以使用频域滤波器如小波变换,傅里叶变换,余弦变换,形态学滤波等方法将图像高低频信息分离。
3.13 常用空间平滑技术
空间平滑(模糊)技术是广泛应用于图像处理以降低图像噪声的技术。 空间平滑技术可以分为两大类:局部平滑(Local Smoothing)和非局部平滑(Non-local Smoothing) 局部平滑方法利用附近的像素来平滑每个像素。通过设计不同的加权机制,产生了很多经典的局部平滑方法,例如高斯Smoothing,中值Smoothing,均值Smooyhing等。
而非局部平滑方法不限于附近的像素,而是使用图像全局中普遍存在的冗余信息进行去噪。具体来说,以较大的图像块为单位在图像中寻找相似区域,再对这些区域求平均,并对中心图像块进行替换,能够较好地去掉图像中的噪声。在平均操作中,可以使用高斯,中位数以及均值等对相似图像块进行加权。
3.14 什么是信噪比
什么是信噪比?
信噪比(SNR)是用来衡量信号强度与噪声强度相对大小的指标。在图像处理中,信号通常指的是有用的图像信息,而噪声则是无用的或干扰图像的成分。信噪比高表示图像中的有用信息远多于噪声,信噪比低则表示图像中噪声较多。
信噪比的计算
信噪比的计算通常表示为信号功率与噪声功率之比,常用的计算公式如下:
$$ \mathrm{SNR}=10\log_{10}\left(\frac{P_{\mathrm{signal}}}{P_{\mathrm{noise}}}\right) $$ 其中,P_signal是信号的功率,P_noise 是噪声的功率。信噪比的单位是分贝(dB)。
在图像处理中,信噪比也可以通过像素值的均方差来计算:
$$ \mathrm{SNR}=10\log_{10}\left(\frac{\mu_{\mathrm{signal}}^2}{\sigma_{\mathrm{noise}}^2}\right) $$ 其中,μ_signal是图像信号的平均值,σ_noise 是噪声的标准差。
信噪比在图像处理中的应用
- 图像质量评估:高信噪比表示图像质量好,因为图像中有用信息占比高,噪声少。
- 图像去噪:去噪算法的效果可以通过信噪比来评估,去噪后图像的信噪比越高,说明去噪效果越好。
- 图像增强:在图像增强处理中,提高信噪比是一个重要目标,以确保增强后的图像清晰度和细节保留。
3.15 OpenCV读取图像的格式
通常其他图像读取函数读取图片的时候是按RGB格式读取,但在OpenCV在读取图片时,是按BGR读取的。
3.16 Pyhton中OpenCV和PIL的区别
- 在读取图片时,OpenCV按照BGR的色彩模式渲染通道,而PIL按照RGB的色彩模式渲染通道。
- OpenCV性能较优,可以作为算法与工程的必备模块。
3.17 RGB图像转换为灰度图的方法
- RGB任选一通道作为灰度图
- RGB中最大值最为灰度图
- RGB的均值作为灰度图
- RGB的加权均值作为灰度图
3.18 色深的概念
色深(Color Depth)指的是色彩的深度,即精细度。在数字图像中,最小的单元是像素,在RGB三通道图像中,每个像素都由R,G,B三个通道组成,通常是24位的二进制位格式来表示。这表示颜色的2进制位数,就代表了色深。
3.19 RAW图像和RGB图像的区别?
RAW格式: 从相机传感器端获取的原始数字格式的数据, 又称为Bayer格式. 每个像素信息只有RGB中的某个颜色信息, 且每4个像素中有2个像素为G信息,1个R信息,1个B信息, 即GRBG格式。
RGB格式: RGB格式是由RAW数据插值计算后获取的、每个像素均包含了RGB三种颜色的信息。
3.20 常用的色彩空间格式
深度学习中常用的色彩空间格式:RGB,RGBA,HSV,HLS,Lab,YCbCr,YUV等。

RGB色彩空间以Red(红)、Green(绿)、Blue(蓝)三种基本色为基础,进行不同程度的叠加,产生丰富而广泛的颜色,所以俗称三基色模式。
RGBA是代表Red(红)、Green(绿)、Blue(蓝)和Alpha(透明度)的色彩空间。
HSV色彩空间(Hue-色调、Saturation-饱和度、Value-亮度)将亮度从色彩中分解出来,在图像增强算法中用途很广。
HLS色彩空间,三个分量分别是色相(H)、亮度(L)、饱和度(S)。
Lab色彩空间是由CIE(国际照明委员会)制定的一种色彩模式。自然界中任何一点色都可以在Lab空间中表达出来,它的色彩空间比RGB空间还要大。
YCbCr进行了图像子采样,是视频图像和数字图像中常用的色彩空间。在通用的图像压缩算法中(如JPEG算法),首要的步骤就是将图像的颜色空间转换为YCbCr空间。
YUV色彩空间与RGB编码方式(色域)不同。RGB使用红、绿、蓝三原色来表示颜色。而YUV使用亮度、色度来表示颜色。
3.21 哪些常用的图像质量评价指标?
- 峰值信噪比(Peak-Signal to Noise Ratio,PSNR)
- 均方误差(Mean Square Error,MSE)
- MAE(Mean Absolute Error,MSE)
- 信噪比SNR(Signal to Noise Ratio,SNR)
- 信息保真度准则(Information Fidelity Criterion,IFC)
- 视觉信息保真度(Visual Information Fidelity,VIF)
- 结构相似度(Structure Similaruty,SSIM)















 559
559











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









