






说明:
不用里程计也可以建图
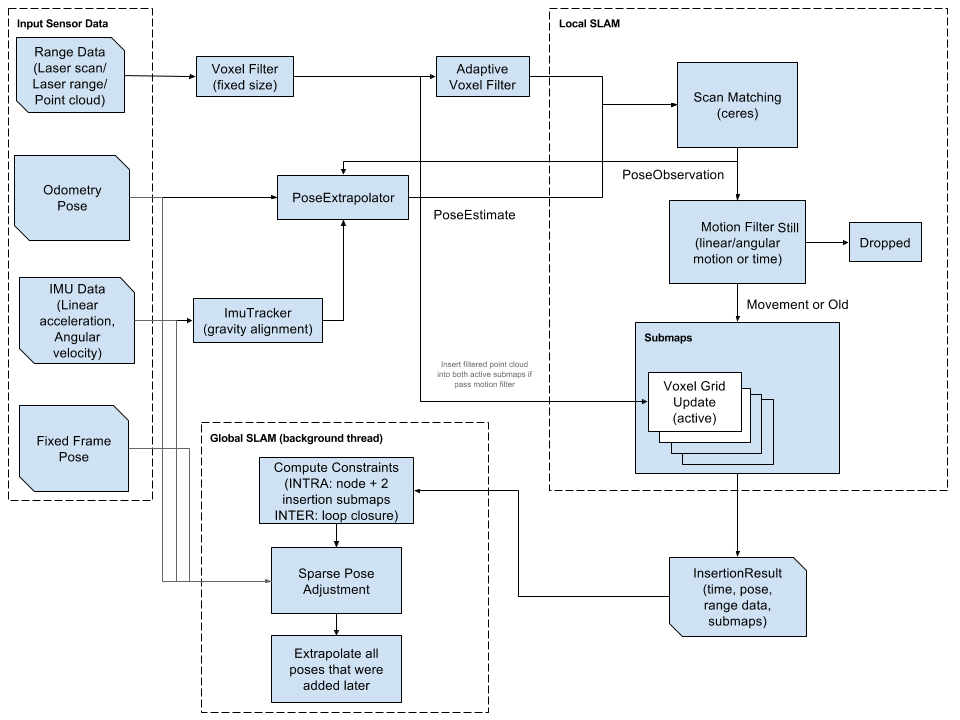
内部原理
使用里程计时的配置
lua文件配置疑惑解答
不使用外部里程计
odom_frame= "odom"
provide_odom_frame=true
use_odometry = false
使用外部里程计
odom_frame= "odom"
provide_odom_frame= false
use_odometry = true
厦门大学参考
厦门大学博客参考:Cartographer使用流程-建图-纯定位-导航
map_frame = "map",
tracking_frame = "base_link",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
use_odometry = true,
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = true,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 10,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 10e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1e-3,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 10
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.min_range = 0.1,
TRAJECTORY_BUILDER_2D.max_range = 8.0,
TRAJECTORY_BUILDER_2D.min_z = -0.05,
TRAJECTORY_BUILDER_2D.max_z = 0.5,
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 8.0
POSE_GRAPH.optimization_problem.local_slam_pose_translation_weight = 1e5
POSE_GRAPH.optimization_problem.local_slam_pose_rotation_weight = 1e5
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e4
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e4
return options
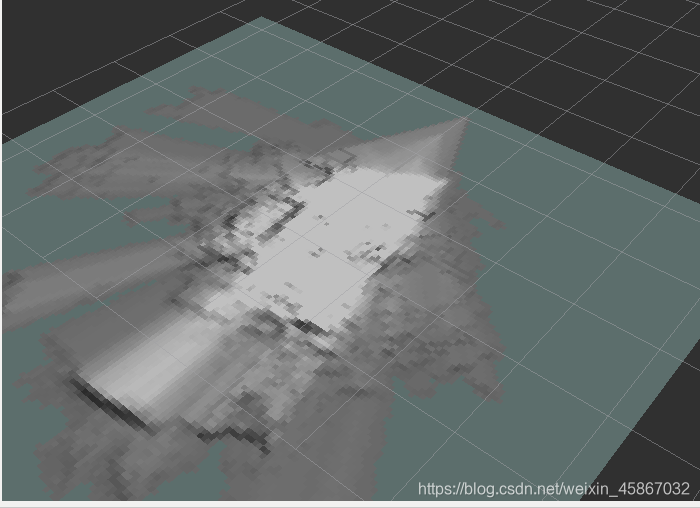
实验室室内图
不使用里程计时的配置
效果图
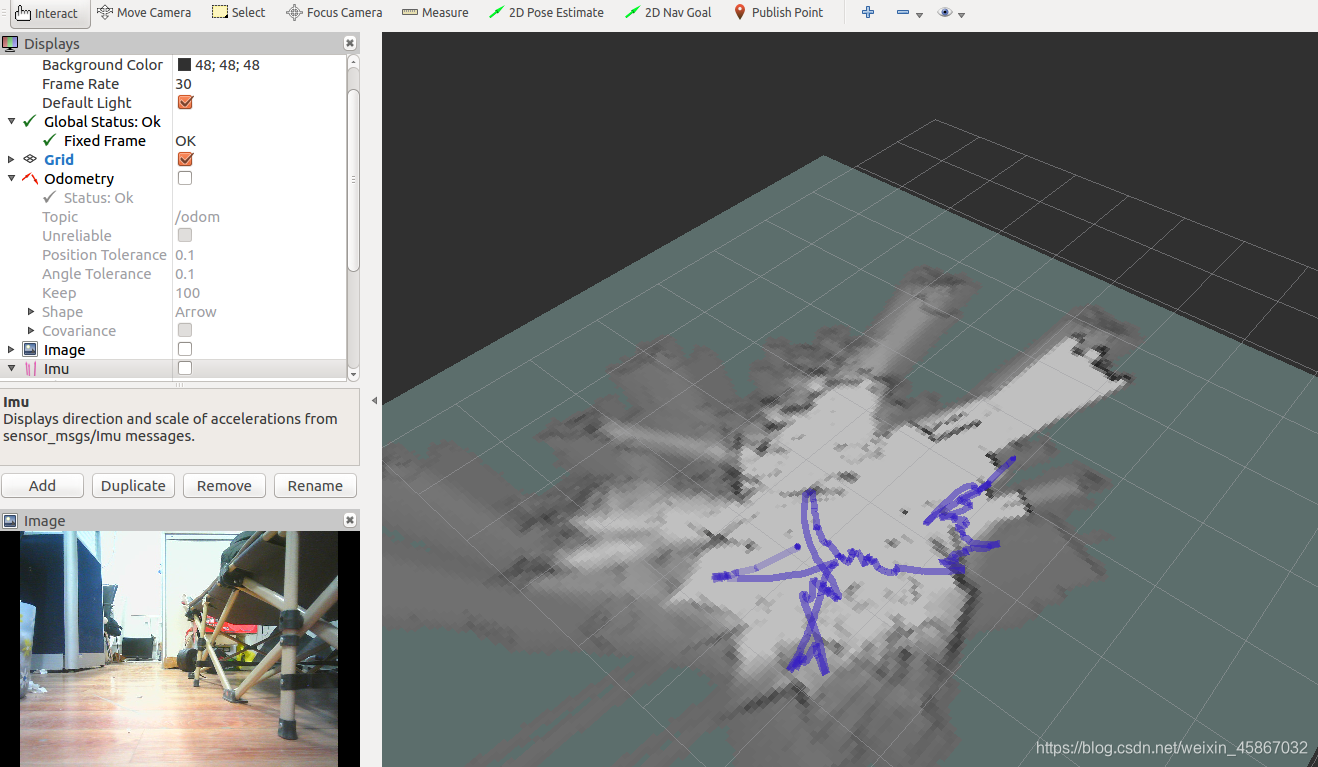
蓝色为轨迹线


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









