







参考链接:
ADS131M02_TI官网资料参考
ADS131M02—英文使用手册
ADS131M0x—参考代码 Example C Code
ADS131M02 是一款 two 通道、同步采样、24 位、ΔΣ 模数转换器 (ADC),具有宽动态范围、低功耗和电能测量特定功能,因此非常适合电能计量、功率计量和断路器应用。
ADS131M02 同属于ADS131M0x系列,x代表通道位数,M02为2通道,M08为8通道。
DSP使用的也是TI的 TMS320F280049C,通讯方式为SPI
时序
SPI 通信
简单介绍一下SPI,如果需要详细了解可以参考这篇文章:SPI通信详解
SPI 是英语 Serial Peripheral interface 的缩写,即串行外围设备接口。SPI 接口主要应用在 EEPROM,FLASH,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为 PCB 的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,STM32 也有 SPI 接口。

ADS131M02使用SPI兼容接口来配置器件并检索转换数据。该器件始终充当 SPI 从机; SCLK 和 CS 是接口的输入。该接口在SPI模式1下运行,其中CPOL = 0,CPHA = 1。在SPI模式1中,SCLK空闲为低电平,数据仅在SCLK上升沿启动或更改;数据由主机和从机在SCLK下降沿上锁存或读取。该接口是全双工的,这意味着接口可以同时发送和接收数据。
该器件包括典型的 SPI 信号:SCLK、CS、DIN (MOSI) 和 DOUT (MISO)。此外,还有另外两个数字引脚提供额外的功能。DRDY 引脚用作主机的标志,用于指示新的转换数据可用。SYNC/RESET引脚是一个双功能引脚,允许将转换同步到外部事件,并允许硬件设备复位。
疑问1:但在实际程序中,我初始化SPI为模式1时发现通讯数据接收回来刚好会便宜一位,如发送复位指令应该回复0xFF22,但是实际回复0x7F91,其正好是FF22右移一位,初始化为SPI的0模式,CPOL = 0,CPHA = 0时又收发都正常,但与手册中说明的却不符…求大佬指点
- 片选 Chip Select (CS)
CS 引脚是一个低电平有效输入信号,用于选择用于通信的器件。该器件忽略任何通信,当 CS 保持高电平时,DOUT 为高阻抗。在通信帧期间将 CS 保持低电平,以确保正确通信。每次 CS 为高电平时,接口都会重置。 - 串行数据时钟 Serial Data Clock (SCLK)
SCLK 引脚是一个输入,用作接口的串行时钟。SCLK上升沿的DOUT引脚转换的输出数据和DIN的输入数据均锁存于SCLK的下降沿。 - 串行数据输入 Serial Data Input (DIN)
DIN引脚是器件的串行数据输入引脚。当 CS 引脚为低电平时,串行命令由器件通过 DIN 引脚移入,每个 SCLK 下降沿。 - 串行数据输出 Serial Data Output (DOUT)
DOUT 引脚是该器件的串行数据输出引脚。当 CS 引脚为低电平时,该器件通过每个上升的 SCLK 边沿串行移出命令响应和 ADC 转换数据。当 CS 为高电平时,该引脚处于高阻抗状态。 - 数据就绪 Data Ready (DRDY)
DRDY引脚是一个低电平有效输出,用于指示转换模式下新的转换数据何时准备就绪,或者在电流检测模式下是否满足电流检测要求。将DRDY引脚连接到主机上的数字输入,以在转换模式下触发定期数据检索。(转换模式:连续转换;全局斩波)。
DRDY引脚与ADS131M02上给定通道的采样时间之间的关系取决于该通道的相位校准设置以及MODE寄存器中DRDY_SEL[1:0]位的状态。DRDY_SEL[1:0]位的设置决定了DRDY引脚何时被激活(即,变为低电平):
当DRDY_SEL[1:0]被设置为00b时,DRDY会在具有最大正相位校准设置(即,最滞后的)的通道有新转换结果时激活。
当DRDY_SEL[1:0]被设置为01b时,设备会在任何通道数据准备就绪时激活DRDY。
当DRDY_SEL[1:0]被设置为10b或11b时,DRDY会在具有最负相位校准设置(即,最领先的)的通道有新转换数据时激活。
在全局斩波模式下,改变DRDY_SEL[1:0]位对DRDY行为没有影响,因为在该模式下相位校准自动禁用。
在MODE寄存器中,DRDY_HIZ位配置了DRDY引脚在非断言(即高电平)时的状态。默认情况下,该位是0b,意味着引脚使用推挽输出级主动驱动为高电平。当该位被设置为1b时,DRDY表现为一个开漏数字输出。如果DRDY未断言,可以使用一个100kΩ的上拉电阻将引脚拉高。
MODE寄存器中的DRDY_FMT位决定了DRDY信号的格式。
当该位为0b时,新数据通过DRDY从高电平变为低电平来指示,并保持低电平,直到所有转换数据从设备中移出,或者在下次DRDY过渡到低电平之前短暂地保持低电平然后变为高电平。当DRDY_FMT位为1b时,新数据通过DRDY引脚上的一个短暂负脉冲来指示。
如果当DRDY_FMT为1b时,主机在DRDY脉冲后不读取转换数据,则设备会跳过一个转换结果,并且在数据因生成脉冲的方式而再次就绪的第二次实例之前,不会提供另一个DRDY脉冲。
重要的是要注意,当新转换完成而正在读取转换数据时,DRDY脉冲会被阻塞。因此,为了避免DRDY行为的不一致性,应避免在新转换完成的时间段内读取ADC数据。这样可以确保DRDY信号能够准确地反映数据就绪的状态。
在我的程序中参考TI工程例子,使用DRDY中断在中断函数中获取采样转换数据并保存。
__interrupt void GPIO_DRDY_IRQHandler(void)
{
int32 ch0 = 0xFF, ch1 = 0xFF;
ReadData(&adcdata_channel);
if(queueIndex >= WINDOW_LEN){
queueIndex = 0;
}
ch0queue[queueIndex] = adcdata_channel.channel0; // 通道0
ch1queue[queueIndex++] = adcdata_channel.channel1; // 通道1
Interrupt_clearACKGroup(PIEACK_GROUP1); //清理中断标志(必须)
}

- 转换同步或系统复位 Conversion Synchronization or System Reset (SYNC/RESET)
SYNC/RESET引脚是一个多功能数字输入引脚,主要用于允许主机将转换同步到外部进程或复位器件。
SPI通信帧
ADS131M02上的 SPI 通信以帧形式执行。每个 SPI 通信帧都由几个字组成。
通过在MODE寄存器中对WLENGTH[1:0]位进行编程,字长可配置为16位、24位或32位。ADS131M02实现了 SPI 通信的超时功能。使用 MODE 寄存器中的 TIMEOUT 位启用或禁用超时。启用后,整个 SPI 帧(第一个 SCLK 到最后一个 SCLK)必须在 215 个 CLKIN 周期内完成,否则 SPI 将复位。此功能是为了在 CS 绑定低的情况下恢复 SPI 同步而提供的方法。该接口是全双工的,这意味着该接口能够在DOUT上传输数据,同时在DIN上接收数据。主机在 DIN 上发送的输入帧始终以命令开头。设备在 DOUT 上传输的输出帧上的第一个字始终以对在前一个输入帧上写入的命令的响应开始。命令中的字数取决于提供的命令。对于大多数命令,框架中有四个单词。在 DIN 上,主机提供命令,如果启用了输入 CRC,则提供命令 CRC,如果禁用了输入 CRC,则提供一个零字,以及另外两个零字。同时在DOUT上,该器件输出来自前一帧命令的响应、代表两个ADC通道的ADC数据字和一个CRC字。图 8-18 展示了一个典型的命令框架结构。

SPI通信字
带有ADS131M02的SPI通信帧由单词组成。DIN上的字可以包含命令、寄存器写入期间的寄存器设置或输入数据的CRC。DOUT上的字可以包含命令响应、寄存器读取期间的寄存器设置、ADC转换数据或输出数据的CRC。字可以是 16、24 或 32 位。字长由MODE寄存器中的WLENGTH[1:0]位配置。设备默认为 24 位字长。命令、响应、CRC 和寄存器始终包含 16 位实际数据。这些字始终是最高有效位 (MSB) 对齐的,因此最低有效位 (LSB) 是零填充的,以适应 24 位或 32 位字的大小。ADC转换数据标称值为24位。当器件配置为 16 位通信时,ADC 会截断其 8 个 LSB。对于由MODE寄存器中的WLENGTH[1:0]位配置的ADC数据,有两种32位通信选项。ADC数据可以是用零填充的LSB,也可以是MSB符号扩展的数据。
疑问2:在调试中发现无论发送什么数据都回复0xFF22
论坛相关问题:
ADS131M02:通过 SPI 通信时返回错误数据。
ADS131M04: 任何指令的回复第一个字节都是FF24
ADS131M02:复位似乎在0.51Hz 频率下发生
ADS131M02: 周期DRDY_n低脉冲,之后立即受到0xFF22数据输出
后续经过仔细对时序并修改,再用示波器测量发送数据的波形发现24bits,3字节的数据原本是一次发送的,但分了两次,先发送16bits,再发送8bits,很奇怪官方库的接口就是有问题,后续将底层读写寄存器的代码直接拷过来操作,并在发送结束拉高片选前多延时一点确保在一个完整24bits发送完毕再拉高片选信号,最终解决。
其底层无非即是读写,spib_addr + 0x8 位置的寄存器完成发送,粗略封的调试接口如下:
uint16_t Send24bits(uint16 spi_data1, uint16 spi_data2, uint16 spi_data3)
{
uint8 dataRx[4] = { 0 };
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x20) != 0U){}
(*((volatile uint16_t *)(spib_addr + 0x8)))= spi_data1; // Send the first 8 bits of the data
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x40) == 0U) {}
dataRx[0] = (*((volatile uint8_t *)(spib_addr + SPI_O_RXBUF))); // Check for data to read.
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x20) != 0U){}
(*((volatile uint16_t *)(spib_addr + 0x8)))= spi_data2;
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x40) == 0U) {}
dataRx[1] = (*((volatile uint8_t *)(spib_addr + SPI_O_RXBUF)));
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x20) != 0U){ }
(*((volatile uint16_t *)(spib_addr + 0x8)))= spi_data3;
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x40) == 0U) {}
dataRx[2] = (*((volatile uint8_t *)(spib_addr + SPI_O_RXBUF)));
while(((*((volatile uint16_t *)(spib_addr + 0x2)))& 0x20) != 0U){}
uint16_t adcResponse = combineBytes(dataRx[0], dataRx[1]);
return adcResponse;
}
通信协议:指令与回复

其余不多解释,参照途中格式即可,着重说明一下读写寄存器的命令:
读寄存器: RREG (101a aaaa annn nnnn)
RREG 用于读取器件寄存器。命令字的二进制格式为 101a aaaa annn nnnn,其中a aaaa a 是开始读取的寄存器的二进制地址,nnn nnnn 是要读取的连续寄存器的无符号二进制数减 1。在ADS131M02上读取寄存器有两种情况。当读取单个寄存器(nnn nnnn = 000 0000b)时,设备在下一帧的命令响应字中输出寄存器内容。如果使用单个命令 (nnn nnnn > 000 0000b) 读取多个寄存器,则设备将按地址顺序顺序输出请求的寄存器数据。

举例:如果要读取地址为0x2,即MODE寄存器(默认值0x0510)时,地址a aaaa a 部分应该为0 0001 0,读取寄存器个数为1,nnn nnnn 即为 1-1=0,所以发送的命令就是 1010 0001 0000 0000 , 然后回复的是读寄存器指令的回复,接着下一个再发送NULL(即全0),这是读回来的就是,0x2地址寄存器的值,为0x0510。
读取多个寄存器时,当 nnn nnnn 在 RREG 命令字中被指定为大于零的数字时,将从器件中读取多个寄存器。与ADS131M02上的所有 SPI 命令一样,响应发生在命令后面帧的输出上。响应不是单个确认词,而是跨越多个词,以便移出所有请求的寄存器。继续切换 SCLK 以适应整个数据流的输出。ADC转换数据不会在RREG命令之后在帧中输出,以读取多个寄存器。图 显示了读取多个寄存器的示例

// 读取地址为 0x3的CLOCK寄存器,默认值为 0x030E
Send24bits(0xA1FF, 0x80FF, 0x00FF); // 1010 0001 1000 0000 0000 0000
Send24bits(0x00FF, 0x00FF, 0x00FF); // 应返回0x030E
写寄存器 WREG (011a aaaa annn nnnn)
与读寄存器指令同理,WREG 命令允许写入任意数量的连续设备寄存器。命令字的二进制格式是 011a aaaa annn nnnn,其中 aaaa a 是要开始写入的寄存器的二进制地址,nnn nnnn 是要写入的连续寄存器的无符号二进制数减 1。在命令字之后立即发送要写入的数据。将每个寄存器的预期内容写入单独的单词,MSB 对齐。如果使能了输入CRC,则在寄存器数据之后写入此CRC。当寄存器被转换为 DIN 时,它们被写入器件。因此,CRC错误并不能阻止将错误值写入寄存器。WREG 命令期间的输入 CRC 错误会在 STATUS 寄存器中设置CRC_ERR位。设备会忽略对只读寄存器或越界地址的写入。寄存器映射地址空间中的间隙仍包含在参数 nnn nnnn 中,但不可写入,因此不会对它们进行任何更改。在以下帧中出现的对 WREG 命令的响应显示为 010a、aaaa、ammm mmmm,其中 mmm mmmm 是实际写入的寄存器数减去 1。主机可以根据 nnn nnnn 检查此数字,以确保写入预期的寄存器数。
显示了典型的 WREG 序列。在本例中,要写入的寄存器数量大于ADC通道的数量,因此,帧延伸到ADC通道和输出CRC字之外。确保在每次有新数据可用的事务处理期间,所有ADC数据和输出CRC都被移出。因此,在某些情况下,帧必须扩展到发送寄存器数据所需的字数之外。

举例:
// 给地址为 0x3的CLOCK寄存器,写为 0x0302
Send24bits(0x61FF, 0x80FF, 0x00FF); // 0110 0001 1000 0000 0000 0000
Send24bits(0x03FF, 0x02FF, 0x00FF);
数据转换
在调试过程中遇到的坑,在经过定时器周期循环采集通道数据时会出现,前两个数据值不对的情况。仔细阅读手册发现如下描述:
在首次收集数据或在暂停后再次开始收集数据时,需要特别注意。输出数据的内部机制包含一个先入先出(FIFO)缓冲区,该缓冲区可以同时为每个通道存储两个数据样本。在STATUS寄存器中,每个通道的DRDY(数据就绪)标志会一直设置,直到该通道的两个样本都被从设备中读取。在正常情况下,当主机连续从设备中读取每个样本时,这种情况并不明显。在这种情况下,每次生成新数据时,样本都会从设备中清除,因此STATUS寄存器中每个通道的DRDY标志都会随着每次读取而被清除。
然而,如果遗漏了一个样本或有一段时间没有读取数据,FIFO的两个槽位都会满。在这种情况下,可以通过对SYNC/RESET引脚进行冲激(strobe)操作来重新同步转换并清除FIFO,或者在首次读取数据或在读取数据出现间隔后快速读取两个数据包。这个过程可以确保DRDY引脚的行为是可预测的。
如果自ADC启用以来,每个输出数据周期都读取了每个通道的数据,则无需采用上述方法。
下图展示了一个例子,说明在ADC运行一段时间后但没有检索数据的情况下如何收集数据。在这种情况下,使用SYNC/RESET引脚来清除内部FIFO,并使ADS131M02的输出数据与主机重新对齐。这个过程有助于确保在数据收集过程中的一致性和准确性。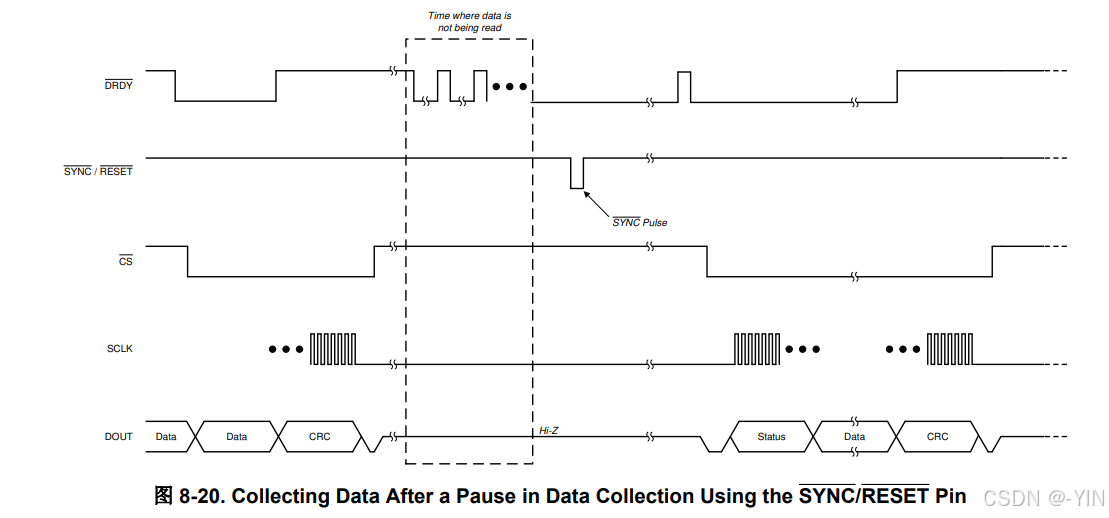
同步:
可以由主机执行,以确保ADC转换与外部事件同步。
例如,如果时钟上的瞬态(glitch)导致主机和设备之间失去同步,同步可以重新调整数据捕获以符合主机的预期时序。
通过在SYNC/RESET引脚上提供一个持续时间小于tw(RSL)但大于CLKIN周期的负脉冲来触发同步。设备内部会将脉冲的负前沿与其跟踪数据速率的内部时钟进行比较。如果内部数据速率时钟配置为在相位校准设置为0b时与DRDY引脚同步,则内部时钟的定时将与DRDY引脚相同。如果SYNC/RESET上的负前沿与内部数据速率时钟对齐,则确定设备已同步,因此不进行任何操作。如果存在不对齐,则设备上的数字滤波器将重置以与SYNC/RESET脉冲同步。在全局斩波模式下,当SYNC/RESET引脚被切换时,转换会立即重新启动。
所有通道的相位校准设置在同步过程中都会被保留。因此,具有非零相位校准设置的通道会在同步事件发生后不到一个数据速率周期的时间内产生转换结果。然而,这些结果可能会被破坏,并且在各自通道至少经过三个转换周期以使sinc3滤波器稳定之前,结果不会稳定。
确实,另一种在数据收集暂停后清除FIFO的功能上等效的方法是,首先快速连续地读取两个样本。下图展示了这种方法。在这个例子中,MODE寄存器中的DRDY_FMT位被设置为0b,表示DRDY是一个电平输出。当第一组数据从设备中移出后,DRDY上会出现一个非常窄的脉冲(Narrow DRDY Pulse)。然而,这个脉冲可能对于某些微控制器来说太窄,难以检测。
因此,不建议依赖这个脉冲,而是应该在读取完第一组数据后立即读取第二组数据。从设备中读取完第二个字后,主机与设备同步工作。这种方法确保了FIFO被清空,并且可以从设备中可靠地继续读取后续的数据样本。
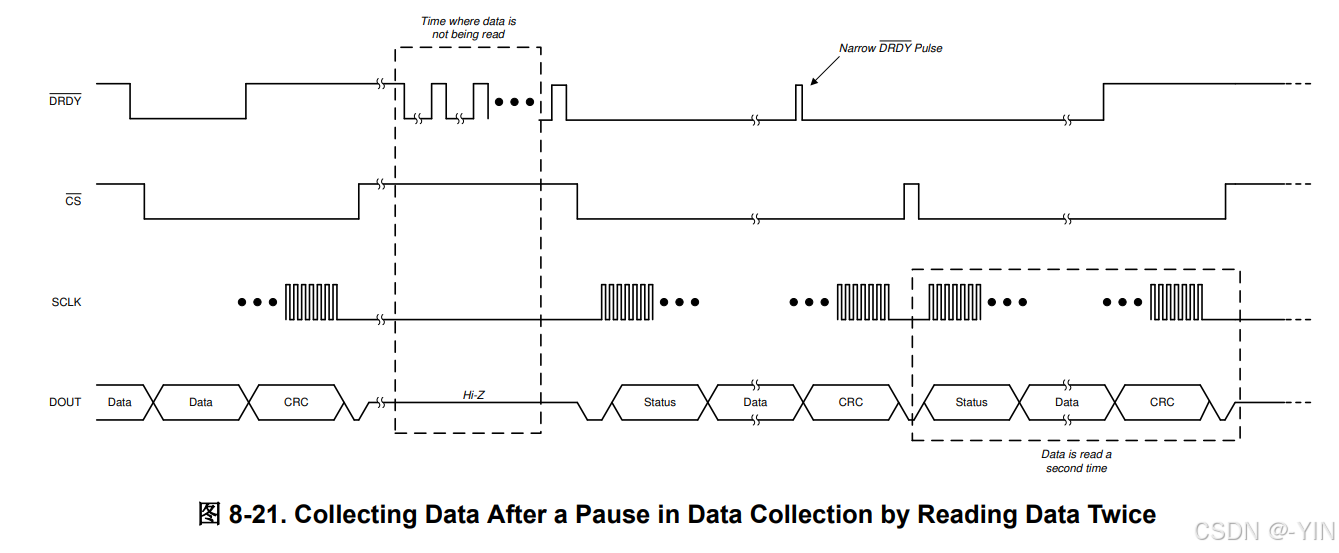
通过遵循这种方法,可以确保在数据收集过程中的连续性和准确性,即使在出现暂停后也能迅速恢复数据的正常读取。这对于需要高可靠性和稳定性的数据采集系统尤为重要。
所以,总结: 在并不是每个数据都及时取走的情况下,在要采样前可以通过两种方法确保采样到准确的值,(1)进行SYN同步来清空FIFO;或者(2)快速连续读取走FIFO中的两个数值。
转换模式
ADS131M02上有两种ADC转换模式:连续转换模式和全局斩波模式。连续转换模式是一种模式,其中ADC以fMOD / OSR定义的速率不断产生ADC转换。全局斩波模式与连续转换模式不同,因为全局斩波会周期性地斩波(或交换)输入,从而减少系统失调误差,但代价是交换输入时各点之间的建立时间。在连续转换模式或全局斩波模式下,有三种电源模式提供灵活的选项,可根据带宽和动态范围调整功耗。
连续转换模式
特点:在此模式下,ADC以fMOD / OSR的速率持续生成转换数据,其中fMOD是调制器时钟频率,OSR是过采样率。每当新数据准备好时,会通过DRDY(数据就绪)信号的下降沿来指示。
用途:连续转换模式适用于测量交流(AC)信号,因为它允许比全局斩波模式更高的输出数据速率。
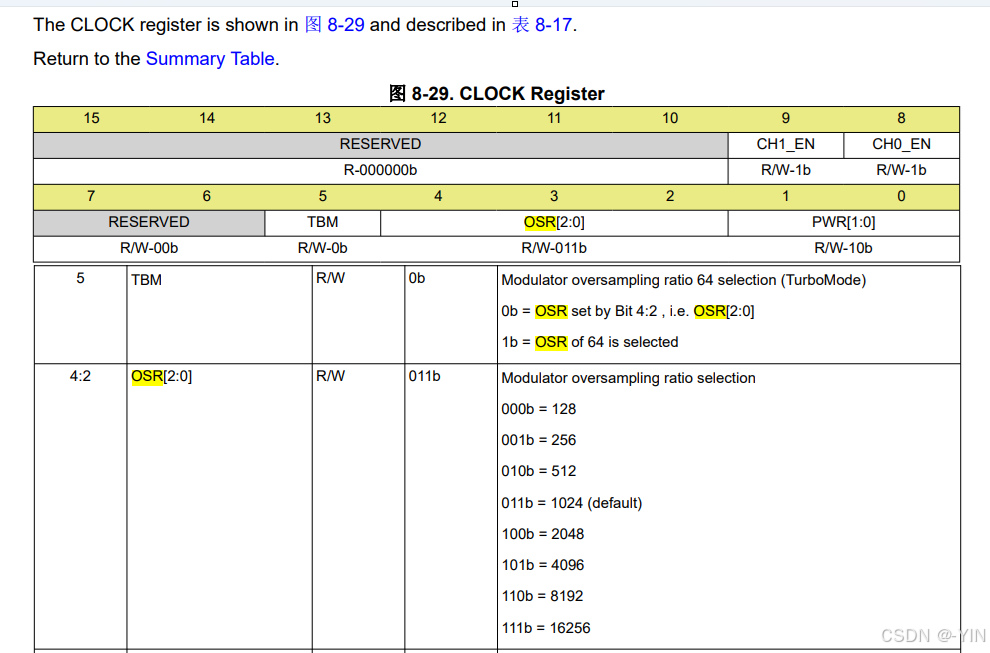
设置CLOCK Register寄存器的OSR位来改变连续转换中ADC的转换速率
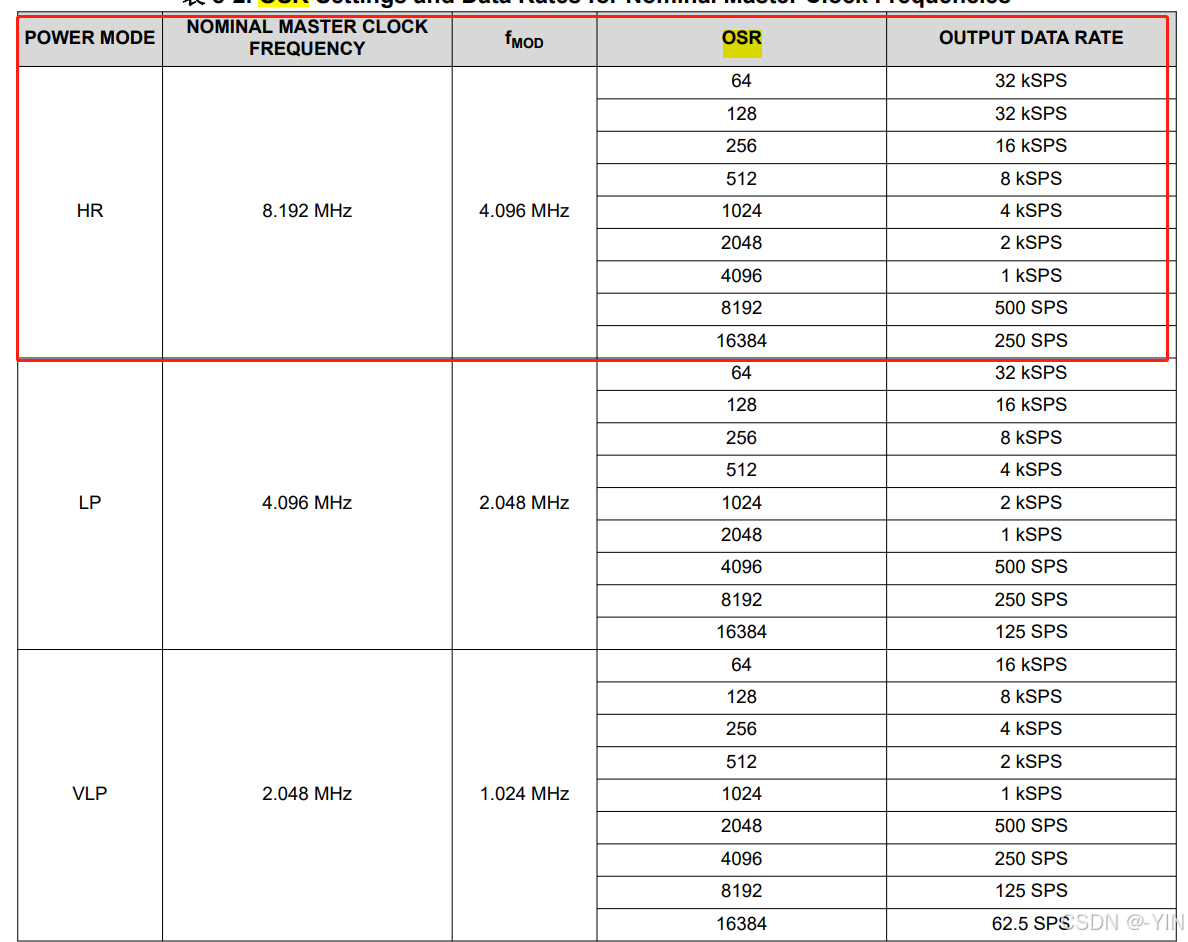
标称主时钟频率的OSR设置和数据速率,目前使用的是HR Power Mode。
在连续变频和全局斩波模式下,有三种可选的功率模式允许根据带宽和性能调整功率:高分辨率 (HR) 模式、低功耗 (LP) 模式和超低功耗 (VLP) 模式。模式由CLOCK寄存器中的PWR[1:0]位选择。
全局斩波模式
特点:全局斩波模式通过周期性地切换(或交换)输入来减少系统偏移误差,但代价是输入切换点之间的稳定时间增加。当在GLOBAL_CHOP_CFG寄存器中设置GC_EN位时,启用全局斩波模式。该模式使用两个连续的内部转换结果(具有相反的输入极性)来消除设备偏移电压。第一个转换(n)使用正常输入极性,然后设备反转内部输入极性进行下一个转换(n+1)。通过取两个连续转换(n和n+1,n+1和n+2等)的平均值,得到最终的偏移补偿结果。
用途:全局斩波模式旨在减少由于内部电路不匹配导致的设备固有偏移误差和偏移漂移,将其降低到非常低的水平。这对于需要高精度和稳定性的应用特别有用。
全局斩波模式下的转换周期与禁用全局斩波模式时的转换时间不同 (tDATA = OSR x tMOD)。下图显示了使用全局斩波模式的ADC通道的转换时序。

在全局斩波模式下,每当设备交换输入极性时,数字滤波器会被重置。ADC随后总是需要三次内部转换来产生一个稳定的全局斩波转换结果。这种设计是为了通过平均两个连续的内部转换结果来减少噪声和偏移误差。
ADS131M02提供了在前一个转换周期结束和输入极性交换后下一个转换周期开始之间的可编程延迟(tGC_DLY)。这个延迟是为了允许外部输入电路稳定,因为斩波开关直接与模拟输入接口相连。通过GLOBAL_CHOP_CFG寄存器中的GC_DLY[3:0]位可以配置斩波后的延迟。全局斩波延迟是以调制器时钟周期为单位选择的,范围从2到65,536个tMOD。
在全局斩波模式下,有效的转换周期遵循方程式8,每当有新的全局斩波转换结果可供主机使用时,就会产生DRDY下降沿。
在以下两种情况下,全局斩波模式下所有ADC通道的转换过程会重新启动,以确保所有通道同时开始采样:
(1) SYNC/RESET引脚的下降沿; (2) OSR设置的更改
在ADC通道被重置后,第一个转换的周期比方程式8中提到的所有后续转换的周期长得多,因为设备首先需要执行两次完全稳定的内部转换,并且输入极性被交换。全局斩波模式下第一个转换的周期遵循方程式9。

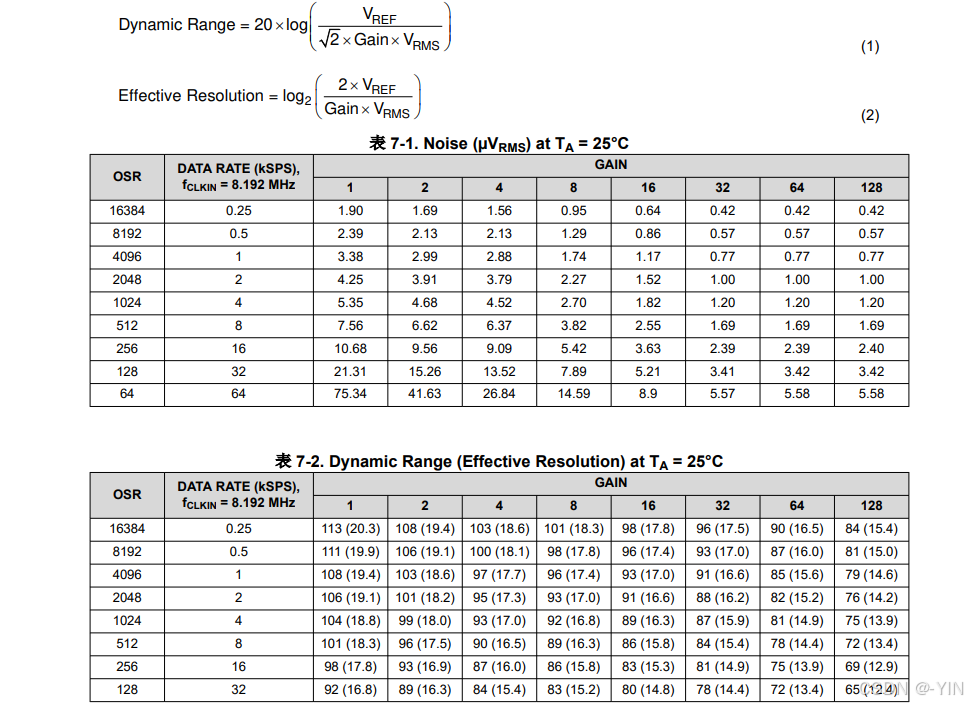
使用全局斩波模式可以在给定的OSR下将ADC噪声(如表7-1所示)降低√2倍,因为两个连续的内部转换结果被平均以产生一个全局斩波转换结果。但需要注意的是,在全局斩波模式下无法测量直流测试信号。
调整数据速率和增益以优化ADS131M02噪声性能。当通过降低数据速率来增加平均时,噪声会相应下降。表 7-1 总结了使用 1.2V 内部基准和 3.0V 模拟电源时的ADS131M02噪声性能。该数据代表了当fCLKIN = 8.192 MHz时TA = 25°C时的典型噪声性能。调制器时钟频率 fMOD = fCLKIN/2。所示数据是典型的输入参考噪声结果,其中模拟输入短路在一起,并在所有通道上取多个读数的平均值。至少连续读数 1 秒用于计算每个读数的 RMS 噪声。表 7-2 显示了根据噪声数据计算出的动态范围和有效分辨率。方程式 1 计算动态范围。方程式 2 计算有效分辨率.在每种情况下,VREF 都对应于内部 1.2V 基准。在全局斩波模式下,噪声提高了 2 √。噪声性能随OSR和增益设置而变化,但与配置的功率模式无关。因此,当选择相同的OSR和增益设置时,该器件在不同的功率模式下表现出相同的噪声性能。但是,OSR 设置下的数据速率会根据不同电源模式的应用时钟频率进行缩放
此外,在全局斩波模式下,相位校准会自动禁用。
如何开启?(寄存器配置)
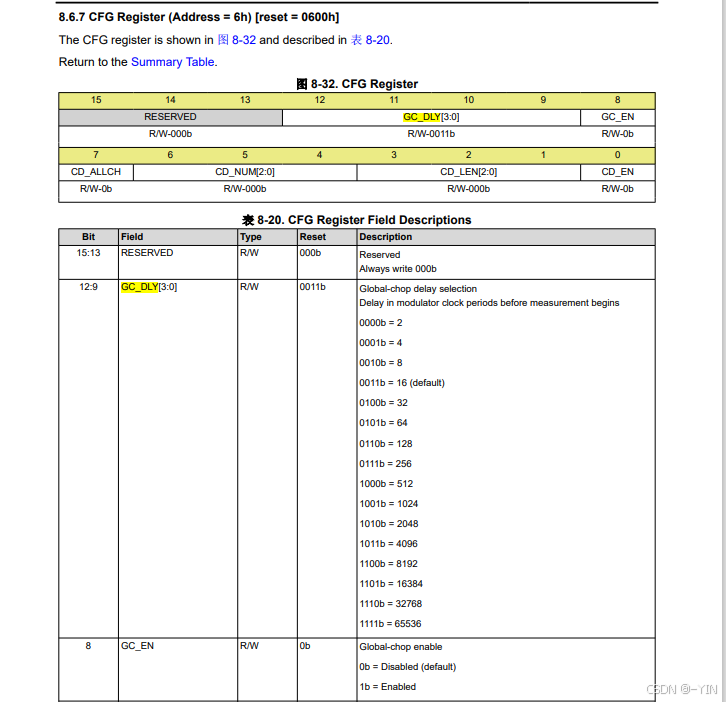
CFG Register (Address = 6h) [reset = 0600h]
GC_EN:为使能全局斩波标记位,1为使能,默认是0不使能;即将CFG的值改为0x700。
GC_DLY:四位用来配置可编程延迟时间,作为转换时间的计算公式,参考上图(8),(9)计算公式(tGC_CONVERSION = tGC_DLY + 3 × OSR x tMOD),默认为16。
相关链接:
ADS124S08的全局斩波功能仅消除 ADC 的失调电压和温漂
总结:
连续转换模式适用于需要高数据速率的应用,特别是AC信号的测量。
全局斩波模式则适用于需要高精度和低偏移误差的应用,通过牺牲一定的稳定时间来换取更高的精度。
未完待续。。。。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









