







文章目录
前言
例如:随着人工智能的不断发展,计算机视觉这门技术也越来越重要,很多人都开启了学习计算机视觉,本文在Opencv基础上实现了摄像头简单手势识别–进度条控制亮度的基础内容,并没有使用深度学习技术,因此准确率并不高。
一、整体框架
∙ \bullet ∙第一步: 开启摄像头,检测每帧图片;
∙ \bullet ∙第二步: 设置回调函数,操纵滑动条来调整亮度;
∙ \bullet ∙第三步: 肤色检测,基于HSV颜色空间H,S,V范围筛选法。在HSV中 7<H<20,28<S<256,50<V<256;
∙ \bullet ∙第四步: 进行高斯滤波;
∙ \bullet ∙第五步: 边缘轮廓检测;
∙ \bullet ∙第六步: 求出手势的凹凸点;
∙ \bullet ∙第七步: 利用凹凸点个数判断当前手势。例如:0个凹凸点就是拳头,4个凹点就是布。
二、使用步骤;
1.引入库;
import cv2
import numpy as np
import math
2.第一步:打开摄像头;
代码如下(示例):
cap = cv2.VideoCapture(0)
while (cap.isOpened()):
ret, frame = cap.read() # 读取摄像头每帧图片
frame = cv2.flip(frame, 1) #镜像调整,将图像左右调换回来正常显示
3.第二步:设置回调函数;
def callback(object): #注意这里createTrackbar会向其传入参数即滑动条地址(几乎用不到),所以必须写一个参数
pass
cv2.createTrackbar("change", "frame", 100, 255, callback)
4.第三步:肤色检测;
# 基于hsv的肤色检测,通过HSV颜色空间来筛选所需要的像素
hsv = cv2.cvtColor(roi, cv2.COLOR_BGR2HSV)
lower_skin = np.array([0, 28, 70], dtype=np.uint8)
upper_skin = np.array([20, 255, 255], dtype=np.uint8)
5.第四步:进行高斯滤波;
# 进行高斯滤波,降低噪声的影响
mask = cv2.inRange(hsv, lower_skin, upper_skin)
mask = cv2.dilate(mask, kernel, iterations=4)
mask = cv2.GaussianBlur(mask, (5, 5), 100)
6.第五步:边缘轮廓检测;
# 找出轮廓,确定手势范围
contours, h = cv2.findContours(
mask, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE) #opencv中提供findContours()函数来寻找图像中物体的轮廓
cnt = max(contours, key=lambda x: cv2.contourArea(x))
epsilon = 0.0005 * cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
hull = cv2.convexHull(cnt)
areahull = cv2.contourArea(hull)
areacnt = cv2.contourArea(cnt)
arearatio = ((areahull - areacnt) / areacnt) * 100
7.第六步:求出手势的凹凸点;
# 求出凹凸点
hull = cv2.convexHull(approx, returnPoints=False) #convexHull能很方便的用于求多边形凸包
defects = cv2.convexityDefects(approx, hull) #使用convexityDefects计算轮廓凸缺陷
8.第七步: 利用凹凸点个数判断当前手势;
# 定义凹凸点个数初始值为0
l = 0
for i in range(defects.shape[0]):
s, e, f, d, = defects[i, 0]
start = tuple(approx[s][0])
end = tuple(approx[e][0])
far = tuple(approx[f][0])
pt = (100, 100)
a = math.sqrt((end[0] - start[0])**2 + (end[1] - start[1])**2)
b = math.sqrt((far[0] - start[0])**2 + (far[1] - start[1])**2)
c = math.sqrt((end[0] - far[0])**2 + (end[1] - far[1])**2)
s = (a + b + c) / 2
ar = math.sqrt(s * (s - a) * (s - b) * (s - c))
# 手指间角度求取
angle = math.acos((b**2 + c**2 - a**2) / (2 * b * c)) * 57
if angle <= 90 and d > 20:
l += 1
cv2.circle(roi, far, 3, [255, 0, 0], -1)
cv2.line(roi, start, end, [0, 255, 0], 2) # 画出包络线
l += 1
font = cv2.FONT_HERSHEY_SIMPLEX
成果展示
可通过滑动条来调整亮度,提高识别率。
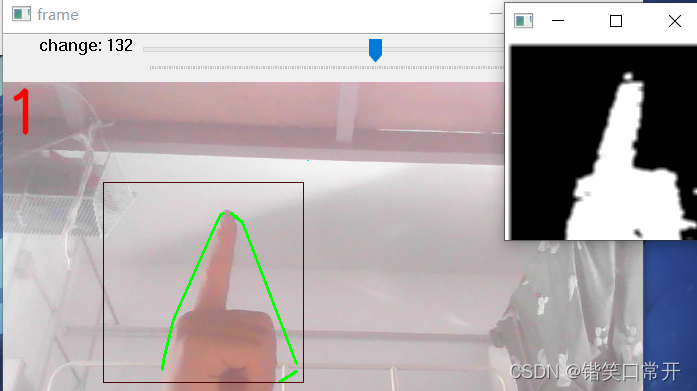
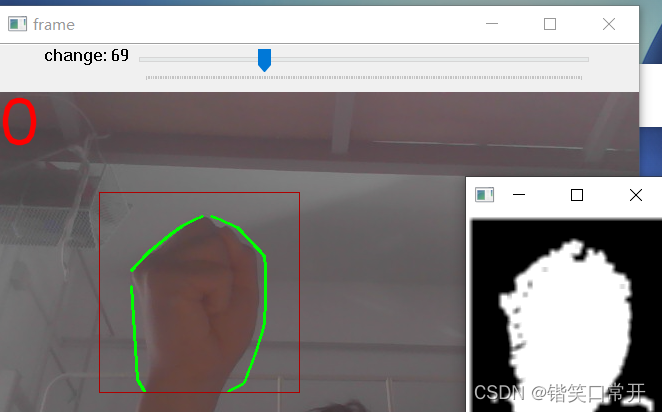
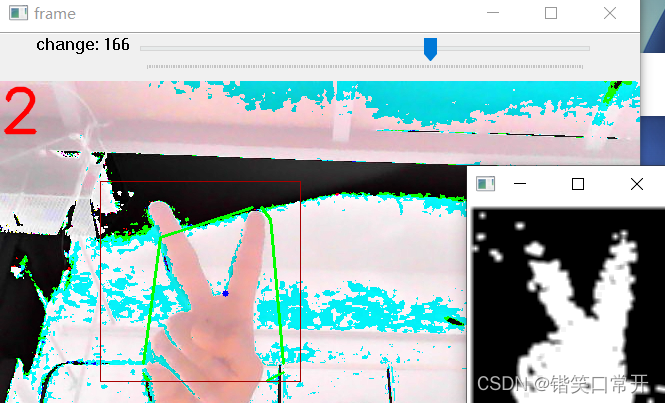
由于肤色检测的时候是用色调来提取特征,因此会被黄色调的影响,因此准确率并不算高,只能实现基本的功能,要想准确率高还得上深度学习算法。
完整代码
# -*- coding: utf-8 -*-
"""
Created on Thu Apr 7 18:42:02 2022
@author: He Zekai
"""
import cv2
import numpy as np
import math
def callback(object): #注意这里createTrackbar会向其传入参数即滑动条地址(几乎用不到),所以必须写一个参数
pass
cap = cv2.VideoCapture(0)
cv2.namedWindow('frame')
cv2.resizeWindow('frame',600,800)
cv2.createTrackbar("change", "frame", 100, 255, callback)
while(cap.isOpened()):
ret,image = cap.read() # 读取摄像头每帧图片
image = cv2.flip(image,1)
cv2.rectangle(image,(100,100),(300,300),(0,0,255),0) # 用红线画出手势识别框
#滑动条控制颜色
value = cv2.getTrackbarPos('change', 'frame')
image_dst = np.uint8(image/100*value)
roi = image_dst[100:300,100:300]# 选取图片中固定位置作为手势输入
kernel = np.ones((2,2),np.uint8)
# 进行高斯滤波
lower_skin = np.array([0,28,70],dtype=np.uint8)
upper_skin = np.array([20, 255, 255],dtype=np.uint8)
mask = cv2.inRange(roi,lower_skin,upper_skin)
mask = cv2.dilate(mask,kernel,iterations=4)
mask = cv2.GaussianBlur(mask,(3,3),100)
# 基于hsv的肤色检测
hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV)
# 进行高斯滤波
mask = cv2.inRange(hsv,lower_skin,upper_skin)
mask = cv2.dilate(mask,kernel,iterations=4)
mask = cv2.GaussianBlur(mask,(5,5),100)
# 找出轮廓
contours,h = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cnt = max(contours,default=0,key=lambda x:cv2.contourArea(x))
epsilon = 0.0005*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,0.05,True)
hull = cv2.convexHull(cnt)
areahull = cv2.contourArea(hull)
areacnt = cv2.contourArea(cnt)
arearatio = ((areahull-areacnt)/areacnt)*100
# 求出凹凸点
hull = cv2.convexHull(approx,returnPoints=False)
defects = cv2.convexityDefects(approx,hull)
# 定义凹凸点个数初始值为0
l=0
try:
for i in range(defects.shape[0]):
s,e,f,d, = defects[i,0]
start = tuple(approx[s][0])
end = tuple(approx[e][0])
far = tuple(approx[f][0])
pt = (100,100)
a = math.sqrt((end[0]-start[0])**2+(end[1]-start[1])**2)
b = math.sqrt((far[0] - start[0]) ** 2 + (far[1] - start[1]) ** 2)
c = math.sqrt((end[0]-far[0])**2+(end[1]-far[1])**2)
s = (a+b+c)/2
ar = math.sqrt(s*(s-a)*(s-b)*(s-c))
# 手指间角度求取
angle = math.acos((b**2 + c**2 -a**2)/(2*b*c))*57
if angle<=90 and d>20:
l+=1
cv2.circle(roi,far,3,[255,0,0],-1)
cv2.line(roi,start,end,[0,255,0],2) # 画出包络线
l+=1
font = cv2.FONT_HERSHEY_SIMPLEX
# 条件判断,知道手势后想实现的功能
if l==1:
if areacnt<2000:
cv2.putText(image_dst,"Please put hand in the window",(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
else:
if arearatio<12:
cv2.putText(image_dst,'0',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
elif arearatio<17.5:
cv2.putText(image_dst,"1",(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
else:
cv2.putText(image_dst,'1',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
elif l==2:
cv2.putText(image_dst,'2',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
elif l==3:
if arearatio<27:
cv2.putText(image_dst,'3',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
else:
cv2.putText(image_dst,'3',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
elif l==4:
cv2.putText(image_dst,'4',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
elif l==5:
cv2.putText(image_dst,'5',(0,50),font,2,(0,0,255),3,cv2.LINE_AA)
# cv2.imshow('frame',frame)
cv2.imshow('mask', mask)
cv2.imshow('frame', image_dst)
key = cv2.waitKey(25)& 0xFF
if key == ord('q'): # 键盘q键退出
break
except:
pass
cv2.destroyAllWindows()
cap.release()
总结
例如:本次基于摄像头的简单手势识别实验,让我对以往的知识掌握更加深刻。虽然现在手势识别都是通过深度学习中的CNN等实现的,但仅使用opencv的传统方法来实现这个功能对我来说还挺新颖的,让我对opencv更加充满了兴趣。















 798
798











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









