







目录
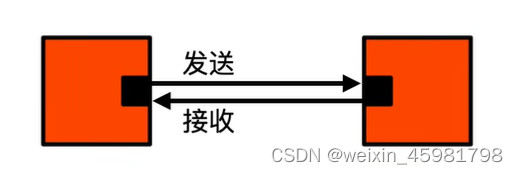
一、串口通讯
只能在两个设备之间进行
若要三台设备两两通信,则每个设备得需要两组窗口,为3组相互独立的窗口通讯
为解决这个问题:设计了总线通讯,有多种,I2C为其中一种
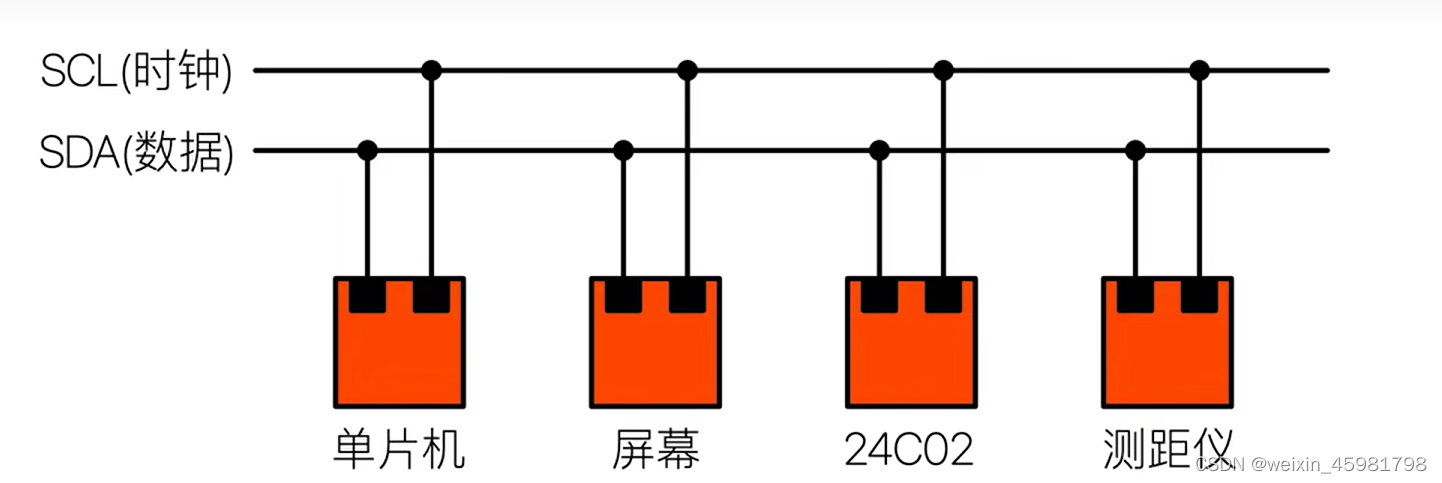
二、I2C通信
(1)特点
1、同步、半双工
2、带数据应答
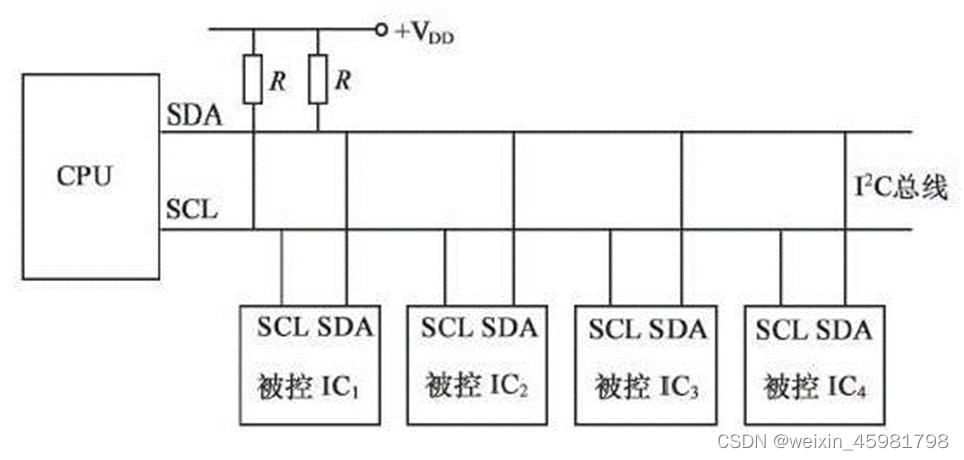
3、支持总线挂载多设备(一主多从、多主多从)
4、可以是软件IC和硬件IC
(2)时钟线和数据线
1、主机:任何情况下,主机完全掌握SCL线,在空闲状态下,主机可以主动发起对SDA控制,只有在从机发送数据和从机应答时,主机才会转交SDA的控制权给从机
2、SCL时钟线在任何时刻都只能被动的读取,从机不允许控制SCL线,
3、SDA数据线,从机不允许主动发起对SDA的控制,只有在主机发送读取从机的命令后,从机应答的时候,从机才能短暂的获取SDA的控制权4、主机拥有SCL的绝对控制权,所以主机的SCL可以配置成推挽输出,所有从机的SCL都配置成浮空输入或者上拉输入
5、为了实现输出输入半双工,避免总线没协调好导致电源短路,I2C规定禁止所有设备输出强上拉的高电平,采用外置若上拉电阻加开漏输出的电路
6、SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
(3)SCL和SDA的状态
当SCL和SDA都为高电平,为空闲状态时(起始和终止都是由主机产生的,故空闲时,从机始终放开)
当SCL为高电平,SDA为下降沿的的状态时,为开始发送数据,起始发送数据完成
当SCL为高电平,SDA为上升沿的的状态时,为数据发送完成
发送数据的过程为下图
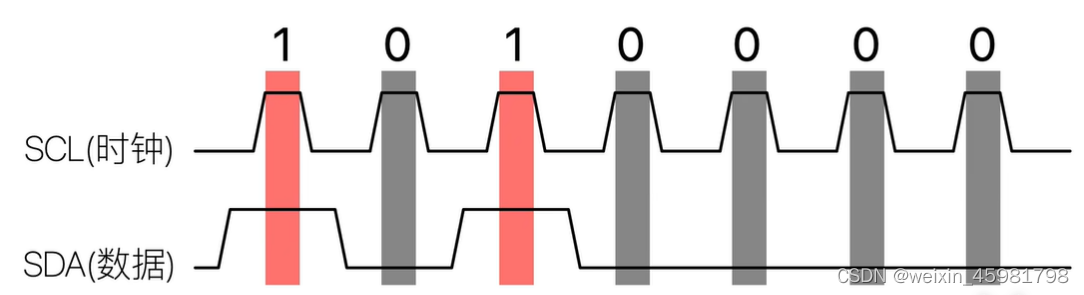
当时钟线为高电平时,数据线上的数据必须保持稳定,比如时钟线为高时,数据线上的数据始终为高,完成逻辑1的传输,保持低电平则为0。(主机在接受之前,需要释放SDA,释放SDA相当于切换成输入模式,所有设备和主机都处于输入模式,当主机需要发送时,就可以主动去拉低SDA,而主机在接收的时候,必须主动释放SDA)
(4)例子:单片机向从设备写信息
假设上述是主机给24C02发送数据:
由上图可知:
24C02的设备地址位1010 000,主机在24C02的 0000 0000的存储位置写入0000 1111的数据
(1)读写数据位:读数据置1,写数据置0
(2)第一个应答信号:信号时由从机发送给主机,如果从机收到之前的信息,回复0,没有收到或者(主机)读取接收完成回复1
(3)第二个应答信号:单片机需要存储器返回一个应答信号
(4)第三个应答信号:发送完数据后,需要再给主机发送应答信号0,告诉主机写入成功
(5)最后写入停止位:SCL为高电平,SDA为上升沿
(5)读数据帧

前半部分:指定地址写(但没来得及写),后半部分,指定地址读
首先写入设备地址,然后写数据,
接下来写寄存器的地址,在收到从机的应答信号之后,主机再发送一个起始号,
再发送一遍设备地址,然后才能发送读数据,接下来,存储器会把寄存器中的数据发送给单片机。
最后一部分的数据可以多来几个,就可以写多个数据,地址指针在读后会自增,就可以连续读出一片区域的寄存器,效率也会变高。
主机给应答:从机就会继续发,主机给非应答,从机不会再法发,交出SDA的控制权,从机控制SDA发送一个字节的权力,开始于读写标志位1,结束于主机给应答位为1
(6)开漏输出和推挽输出
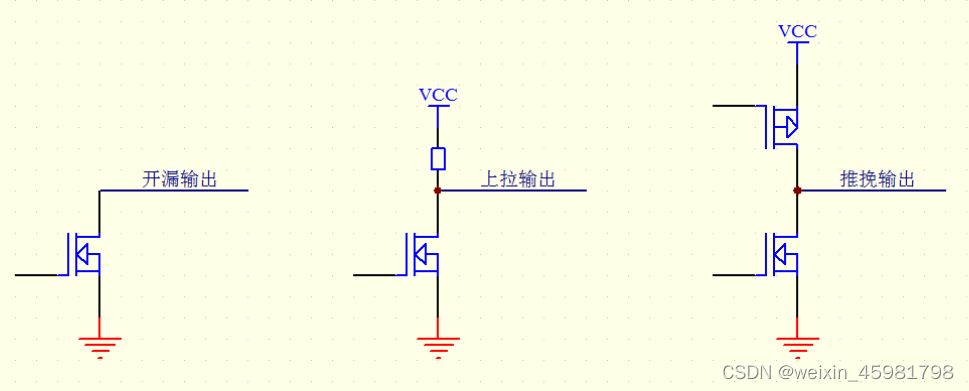
任何设备在任何时刻都可以输入,但在输出部分,采用的是开漏输出
推挽输出:上面一个开关管接到正极,下面一个开关管接到负极,上面导通输出高电平,下面导通输出低电平,因为这是通过开关管直接接到正极和负极的,所以这个是强上拉和强下拉的模式
开漏输出:去掉强上拉的开关管,输出低电平时下面导通是强下拉,输出高电平时,下面断开但是没有上管了,引脚浮空,故所有设备只能输出低电平而不能输出高电平
为了避免高电平造成的引脚浮空,需要在总线外面SCL和SDA各置一个上拉电阻,弱上拉
开漏加弱上拉模式:同时兼具的输入和输出的功能
要输出时,就去拉杆子或者放手操作杆子变化就行了
要输入时,就直接放手然后观察杆子高低就行了
因为开路模式下,输出高电平就相当于断开硬件,所以在输入之前可以直接输出高电平,不需要再切换成输入模式
第三就是这个模式会有个“线与”的现象,只要有任意一个或多个设备,输出了低电平,,总线就处于低电平
只有所有的设备都输出高电平,总线才处于高电平
(7)两个实验
1、介绍协议规则,用软件模拟的形式实现协议(AT24C02存储器模块)
通过数据线,实现单排年纪读写外挂模块寄存器的功能
在指定的位置写寄存器,对外挂模块进行配置
在指定的位置度寄存器,获取外挂模块的数据,读出的数据会显示显示屏上
本节课程主要有两个代码
1、软件I2C读写MPU6050
2、硬件I2C读写MPU6050
代码实现的效果是一样的
软件I2C读写MPU6050的程序现象
通过软件I2C协议对MPU6050(在本实验中ID号为0x68)芯片内部的寄存器进行读写
写入到配置寄存器,可以对外挂的模块及进行配置
读出数据寄存器,可以获取外挂的数据
最终显示在屏幕上
最上面:id号
左边:加速度传感器的输出数据(x轴y轴和z轴的加速度)
右边:陀螺仪传感器的输出数据(x轴y轴和z轴的角速度)
改变MPU6050传感器的姿态,6个数据就会对应变化
(8)异步时序和同步时序
a、异步时序
1、好处:省一根时钟线,节省资源
2、坏处:对时钟要求严格,发送方和接收方时钟不能由过大的偏差
传输过程中,单片机进中断,发送方时序暂停,接受方仍会按照约定的速率读取,传输出错
故异步时序的缺点:非常依赖硬件外设的支持,必须有USART电路才能方便的使用,否则很难用软件模拟。
b、同步时序(时钟要求不严格,对电路依赖度低)
1、设计时钟线,则对传输的时间要求变低
2、在单方面暂停传输时,时钟线也暂停,传输双方都能定格在暂停的时刻,可过段时间再来继续,
3、极大的降低单片机对硬件电路的依赖,没有硬件电路的支持,也可以很方便的用软件手动翻转电平来实现通信
三、MPU6050
(1)MPU6050简介
• MPU6050 是一个 6 轴姿态传感器,可以测量芯片自身 X 、 Y 、 Z 轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景• 3 轴加速度计( Accelerometer ):测量 X 、 Y 、 Z 轴的加速度• 3 轴陀螺仪传感器( Gyroscope ):测量 X 、 Y 、 Z 轴的角速度
(2)MPU6050参数
• 16 位 ADC 采集传感器的模拟信号,量化范围: -32768~32767• 加速度计满量程选择: ±2 、 ±4 、 ±8 、 ±16 ( g )• 陀螺仪满量程选择: ±250 、 ±500 、 ±1000 、 ±2000 ( °/sec )• 可配置的数字低通滤波器• 可配置的时钟源• 可配置的采样分频•I2C从机地址:1101000(AD0=0)1101001(AD0=1)
例如从机地址为0x68,(0x68<<1)|1(或者(0x68<<1)|0)当作从机地址,因为传输的时候是8个字节,前七个是地址,最后一位是数据读写位
- 若物体运动剧烈,选择大量程,防止加速度或角速度超出了量程
若物体运动平缓,选择小量程,则测量的分辨率比较大- 满量程越大测量范围就越广
满量程越小测量分辨率就越高- 满量程和加速度是线性关系
- 可配置数字低通滤波器:配置寄存器对输出数据进行低通滤波,消除数据抖动,使数据输出平缓
- 时钟源通过分频器的分频,可以为AD转换,给内部其他电路提供时钟
- 控制分频系数就可以控制AD转换的快慢
(3)MPU6050硬件电路
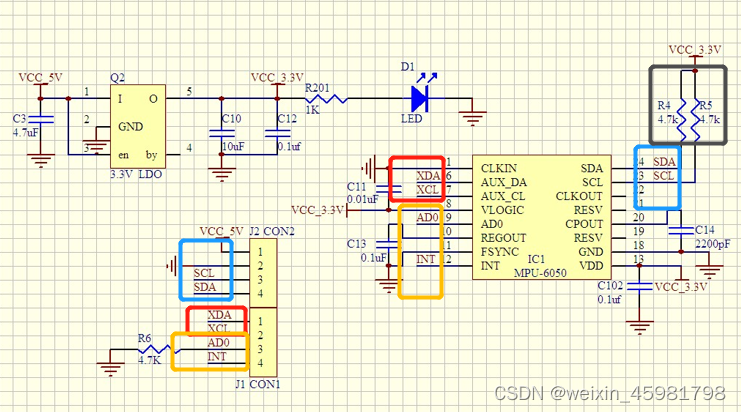

a、左上角LDO
- 为低压差线性稳压器,输入端可以是3.3V到5V,经过后输出稳定3.3V的电压
b、右下角J1 CON1模块
- 左下角XCL和XDA通常就是用于外接磁力计或者气压计(在无人机需要定高飞行需要增加气压计的时候使用)
- 当接上磁力计或气压计之后,MPU6050的主机接口可以直接访问这些扩展芯片的数据
- 把这些扩展芯片的数据读取到MPO6050里面,在MPO6050里面会有DMP单元,进行数据融合和姿态解算
- 若不需要MPO6050的解算功能,可以把磁力计或气压计直接挂载在SCL和SDA总线上
- AD0引脚:是从机地址的最低位,接低电平时候,7为从机地址为110 1000,接高电平时,7位从机地址是110 1001,AD0接了一个电阻,故悬空是低电平状态,若想要接高电平,可以把AD0直接引导VCC上,强上拉至高电平
- INT:中断输出引脚,可以配置芯片内部的一些事件来触发中断引脚的输出
比如数据准备好了、I2C主机错误等
U60参数MPU6050参














 491
491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









