






 该系统由STC89C52单片机、脉搏/心率传感器、霍尔测速电路、电机控制电路和LCD1602显示等组成,用于检测脉搏/心率和电机转速。用户可通过电位器调节电机速度,模拟跑步机调速。系统采用5V电源,电机调速通过模拟电路实现,心率传感器采用Pulsesensor模块,输出脉搏信号。详细设计包括电源、电机调速和心率传感器电路的原理图及程序流程。
该系统由STC89C52单片机、脉搏/心率传感器、霍尔测速电路、电机控制电路和LCD1602显示等组成,用于检测脉搏/心率和电机转速。用户可通过电位器调节电机速度,模拟跑步机调速。系统采用5V电源,电机调速通过模拟电路实现,心率传感器采用Pulsesensor模块,输出脉搏信号。详细设计包括电源、电机调速和心率传感器电路的原理图及程序流程。
系统的功能分析及体系结构设计
(下方附文件)
3.1.1系统功能分析
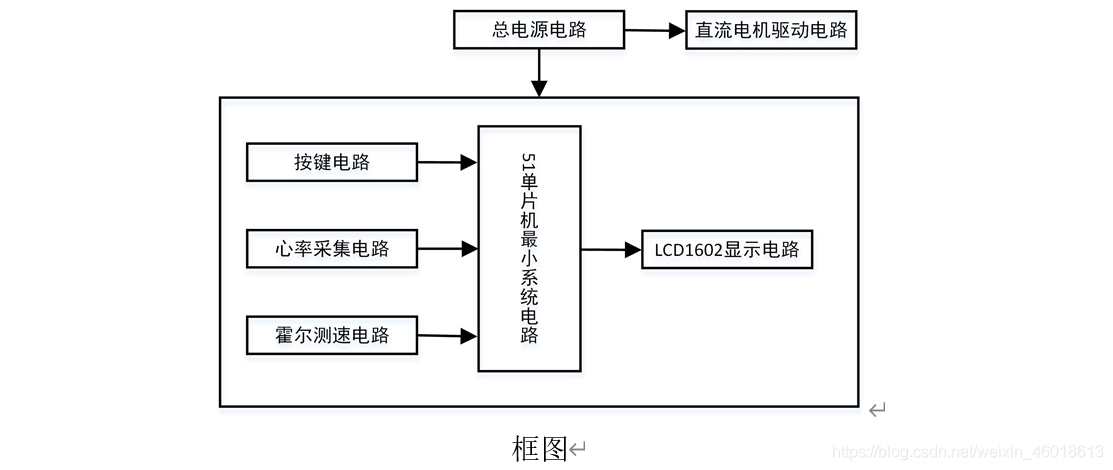
本设计由STC89C52单片机电路+脉搏/心率传感器电路+LM393比较器电路+霍尔测速电路+电机控制电路+LCD1602显示电路+电源电路组成。
1、通过脉搏/心率传感器检测脉搏/心率值,通过霍尔传感器检测电机转速。
2、也就LCD1602实时显示脉搏/心率值和速度值。
3、可以通过电位器调节电机转速,模拟跑步机调速。
3.1.2系统总体结构
方案图:
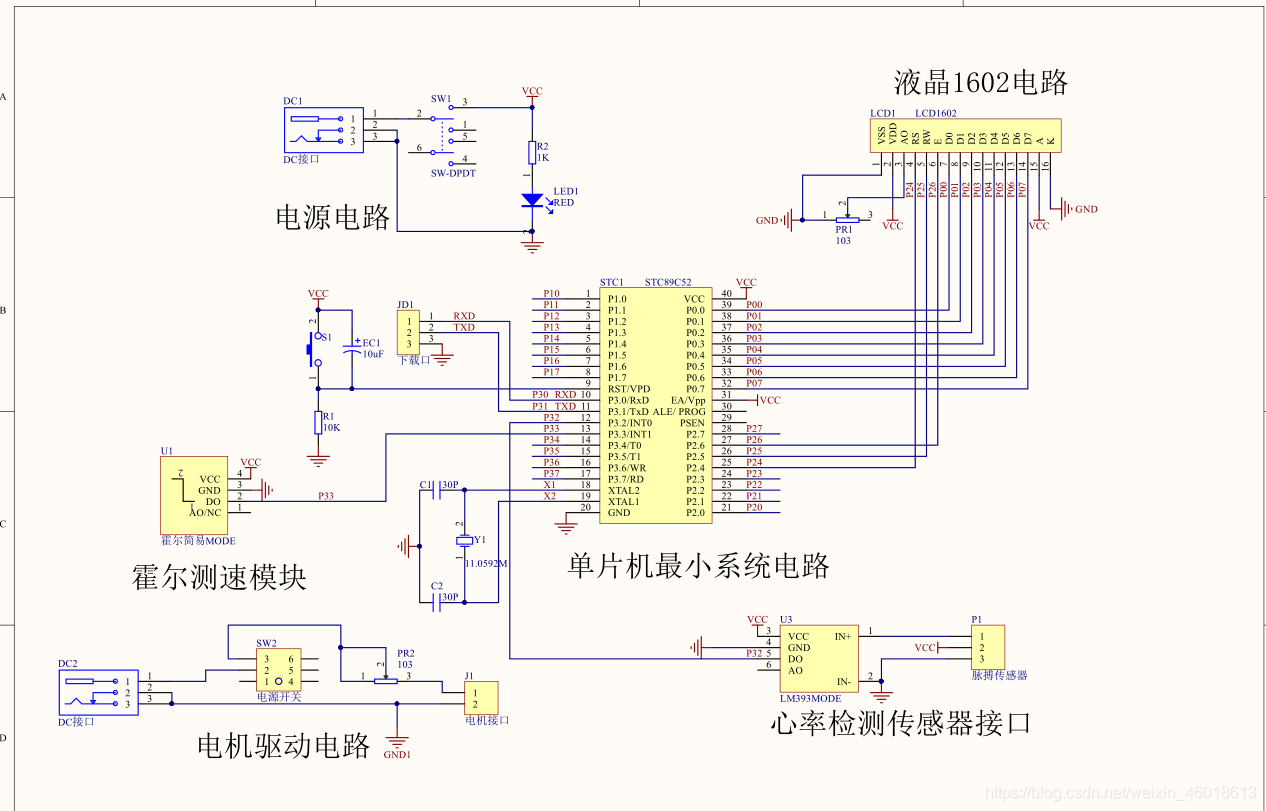
原理图:
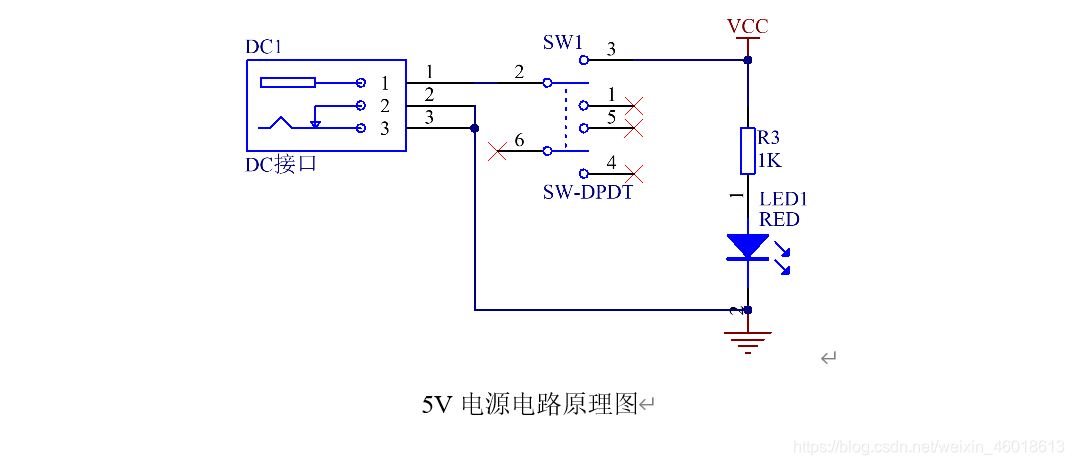
5V电源电路设计
本系统选择5V直流电源作为系统总电源,为整个系统供电,电路简单、稳定。DC为电源的DC插座,可以直接接USB电源线,一端插在DC插座上,另外一端可以插在5V电源上,如电脑USB、充电宝、手机充电器等等。LED为红色LED灯,作为系统是否有点的指示灯,电阻为1K电阻,起到限流作用,保护LED灯,以防电流过大烧坏LED灯。SW为自锁开关,开关按下后,红灯亮,此时系统电源5V直流输出。开关再次按下后,红灯灭,此时系统电源无5V电源输出。
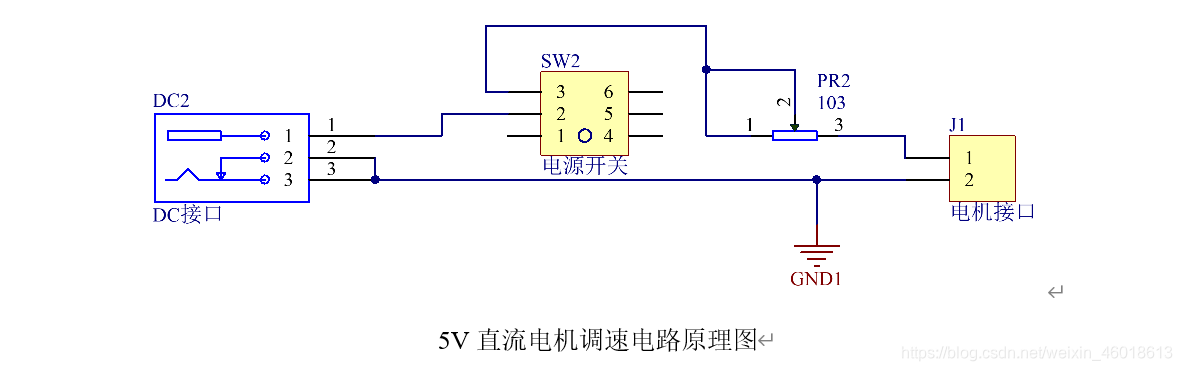
5V直流电机调速电路设计
电动马达(Electric motor),又称为马达或电动机,是一种将电能转化成机械能,并可再使用机械能产生动能,用来驱动其他装置的电气设备。
直流电动机(DC Motor)的好处为在控速方面比较简单,只须控制电压大小即可控制转速,但此类电动机不宜在高温、易燃等环境下操作,而且由于电动机中需要以碳刷作为电流变换器(Commutator)的部件(有刷马达),所以需要定期清理炭刷磨擦所产生的污物。
马达的旋转原理的依据为佛来明左手定则,当一导线置放于磁场内,若导线通上电流,则导线会切割磁场线使导线产生移动。电流进入线圈产生磁场,利用电流的磁效应,使电磁铁在固定的磁铁内连续转动的装置,可以将电能转换成力学能。 与永久磁铁或由另一组线圈所产生的磁场互相作用产生动力 直流马达的原理是定子不动,转子依相互作用所产生作用力的方向运动。 交流马达则是定子绕组线圈通上交流电,产生旋转磁场,旋转磁场吸引转子一起作旋转运动直流马达的基本构造包括“电枢”、“场磁铁”、“集电环”、“电刷”。
电枢:可以绕轴心转动的软铁芯缠绕多圈线圈。 场磁铁:产生磁场的强力永久磁铁或电磁铁。集电环:线圈约两端接至两片半圆形的集电环,随线圈转动,可供改变电流方向的变向器。每转动半圈(180度),线圈上的电流方向就改变一次。 电刷:通常使用碳制成,集电环接触固定位置的电刷,用以接至电源。
本系统选通过纯模拟电路即可实现对电机转速的调节,DC为电源插座,SW2为电源开关,PR为10K的大功率电阻。当系统上电后,按下电源开关,通过调节电位器PR即可实现调速,调节PR,则分配到电机上的电压则会在0-5V变化,通过改变施加在电机上的电压的变化来实现对电机转速的调节。其具体原理图如下图所示。电机最大的速度只与电位器分配到电机上的电压有关。
Pulsesensor脉搏心率传感器模块电路设计
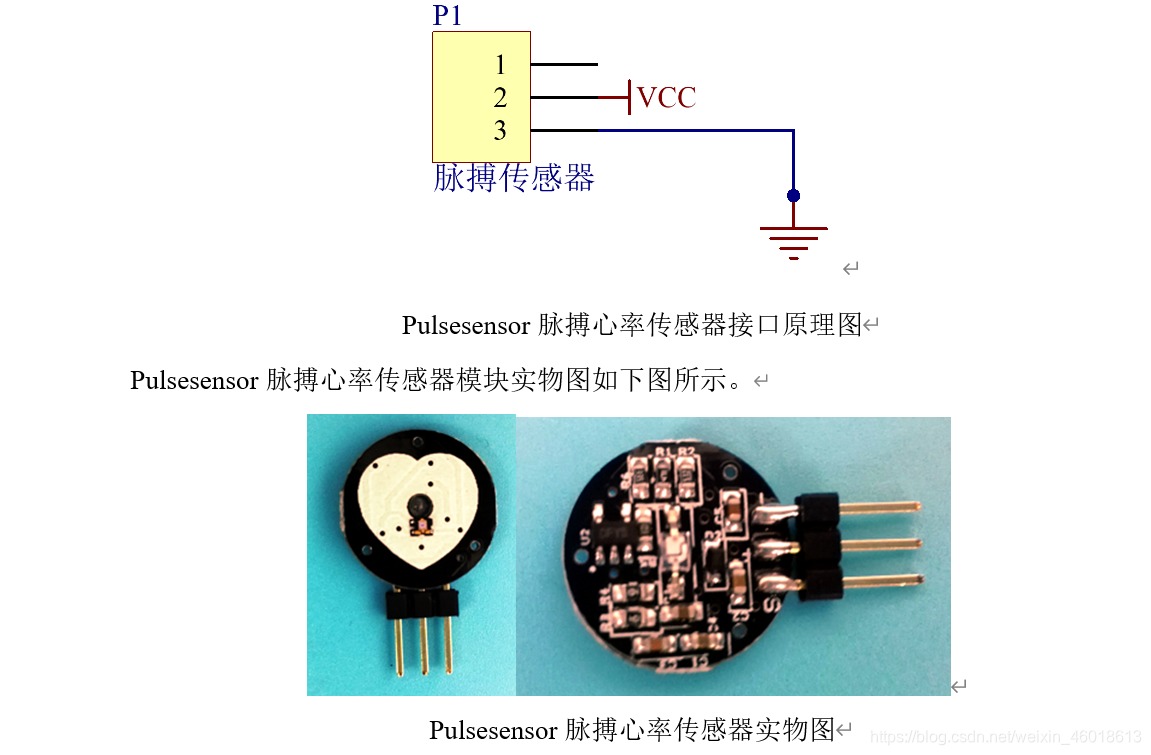
脉搏心率传感器是用来测试心跳速率的传感器,实质是一款集成了放大电路和噪声消除电路的光学心率传感器。可以通过此传感器开发出和心率有关的互动作品。传感器可以戴在手指或者耳垂上。光电传感器将脉搏信号转换为电信号,此装置需要把手指放在传感器表盘上,光电传感器,此传感器是集成了放大电路和噪声消除电路的光学心率传感器,光电传感器一侧的发光二极管发光,当脉搏跳动时,指尖或者耳垂的动脉血管血容量发生周期性变化,透过指尖的光强度同时发生变化。另一侧的光电三极管将接收到的红外光信号转化为电信号。
一、接口说明
(1)+ 外接5V
(2)- 外接GND
(3)S 输出接口(0和1)
Pulsesensor脉搏心率传感器模块接口原理图如下图所示。
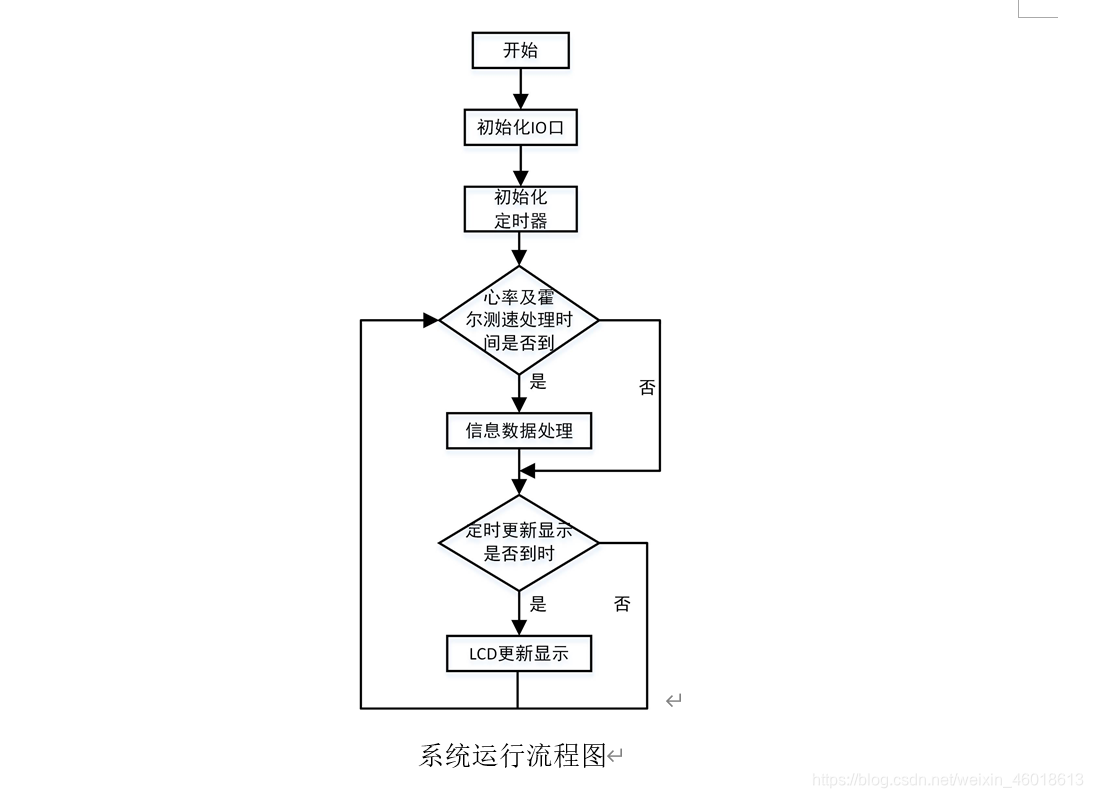
程序流程图
#include <reg52.h> //调用单片机头文件
#include <intrins.h>
#include "1602.h"
#include "delay.h"
unsigned char i_i=0,timecount=0,displayOK=0,rate=0,aa=0; //中间变量定义
unsigned int time[6]={0}; //暂存心率值
unsigned char tab_sk[16]="Wlcome! 000r/min"; //显示第一行内容
unsigned char tab_ht[16]="000/min 000S ";
unsigned int Tiem_S=0; //秒时间++
unsigned int Run_ts=0; //运行速率
unsigned long Run_num=0; //电机脉冲计数
unsigned char update_flag=0; //更新显示标志
unsigned long time_50ms=0; //定时50ms计数
void time_init(void); //函数声明
void InitTimer1(void);
void init_int(void);
/****************主函数***************/
void main()
{
time_init(); //初始化定时器
InitTimer1();
init_int(); //外部中断0初始化程序
EA=0;
LCD_Init(); //初始化液晶
DelayMs(20); //延时有助于稳定
LCD_Clear(); //清屏
DelayMs(10);
LCD_Write_String(0,0,tab_sk); //初始化显示 "S:Walk 000.00cal";
LCD_Write_String(0,1,tab_ht); //初始化显示 LCD_Write_String(0,1,tab_ht); //初始化显示
EA=1;
while(1)
{
if(displayOK==0)//如果显示关 检测心率是否真实
{
rate = 0;
}
else//如果显示开
{
rate=60000/(time[1]/5+time[2]/5+time[3]/5+time[4]/5+time[5]/5); //心率计算 5次求平均值
}
if(update_flag==1) //更新显示标志置位
{
update_flag=0; //更新显示标志清零
tab_ht[9]=(unsigned char)(Tiem_S/100%10+'0'); //时间记录 并转为字符
tab_ht[10]=(unsigned char)(Tiem_S/10%10+'0');
tab_ht[11]=(unsigned char)(Tiem_S%10+'0');
// tab_sk[7]=(unsigned char)(Run_num/1000%10+'0'); //转速转化为字符显示
tab_sk[8]=(unsigned char)(Run_num/100%10+'0');
tab_sk[9]=(unsigned char)(Run_num/10%10+'0');
tab_sk[10]=(unsigned char)(Run_num%10+'0');
LCD_Write_String(0,0,tab_sk); //显示转速 第一行
tab_ht[0]=rate/100+'0'; //心率转化 并转化为字符型
tab_ht[1]=rate/10%10+'0';
tab_ht[2]=rate%10+'0';
LCD_Write_String(0,1,tab_ht); //显示心率及时间
}
}
}
/*************定时器0初始化程序***************/
void time_init(void)
{
EA = 1; //开总中断
TMOD |= 0X01; //定时器0、定时器1工作方式1
ET0 = 1; //开定时器0中断
TR0 = 1; //允许定时器0定时
}
/***********外部中断0初始化程序****************/
void init_int(void) //外部中断0初始化程序
{
EX0=1; //允许外部中断0中断
EX1=1; //允许外部中断0中断
EA=1; //开总中断
IT0 = 1; //外部中断0负跳变中断
IT1 = 1; //外部中断0负跳变中断
}
void int0() interrupt 0
{
EX0=0;//暂时关外部中断
if(timecount<8) //当连续两次检测时间间隔小于8*50ms=400ms不处理
{
TR0=1;//开定时器
}
else
{
time[i_i]=timecount*50+TH0*0.256+TL0/1000;//算出间隔时间
TH0 = 0x3c;
TL0 = 0xb0; // 50ms 12M
timecount=0;//50ms计数清零
i_i++;
if(i_i==6)//记录到超过等于6次时间
{
i_i=1;//计数从1开始
displayOK=1; //测得5次开始显示?
}
}
EX0=1;
}
void int1() interrupt 2
{
EX1=0;//暂时关外部中断
Run_ts++;
EX1=1;
}
/*************定时器0中断服务程序***************/
void time0_int() interrupt 1
{
TH0 = 0x4c;
TL0 = 0x00; // 50ms 11.0592M
timecount++;//每50ms一次计数
if(timecount>65) //当超过25*50ms=1.5s没有检测到信号停止显示
{
i_i=0;//数据个数清零
timecount=0;//50ms计数清零
displayOK=0;//显示关
TR0=0;//定时器关
TH0 = 0x3c;
TL0 = 0xb0; // 50ms 11.0592M
}
}
void InitTimer1(void) //定时器1初始化
{
TMOD |= 0x10;
TH1 = 0xEC;
TL1 = 0x78;
EA = 1;
ET1 = 1;
TR1 = 1;
}
void Timer1Interrupt(void) interrupt 3
{
TH1 = 0x4C;
TL1 = 0x00;
time_50ms++;
if(time_50ms%2==0) //定时100ms
{
update_flag=1; //更新数据标志置位
}
if(time_50ms%40==0) //定时2S
{
Run_num=Run_ts*15;// 处理转速
Run_ts=0;
}
if(time_50ms%20==0) //定时1S
{
Tiem_S++; //秒时间++
}
}
.
链接:https://pan.baidu.com/s/1NM0nkrCJEPVROwbkEKzByQ
提取码:c4h7
.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









