






一、使用STM32CUBE配置TIM的PWM
使用PB3引脚,对应TIM1的CH2。按照下图配置成内部时钟和PWM输出模式。
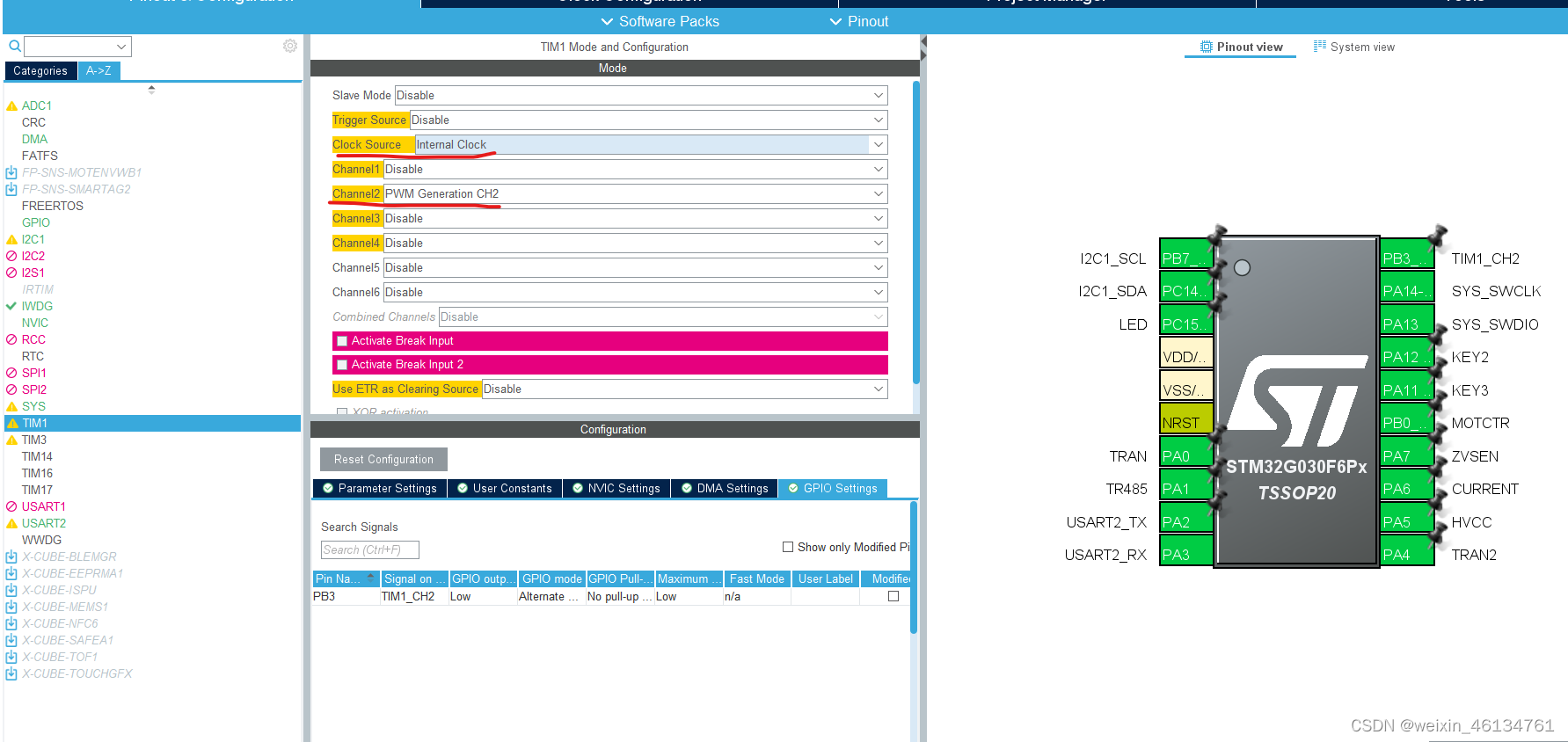
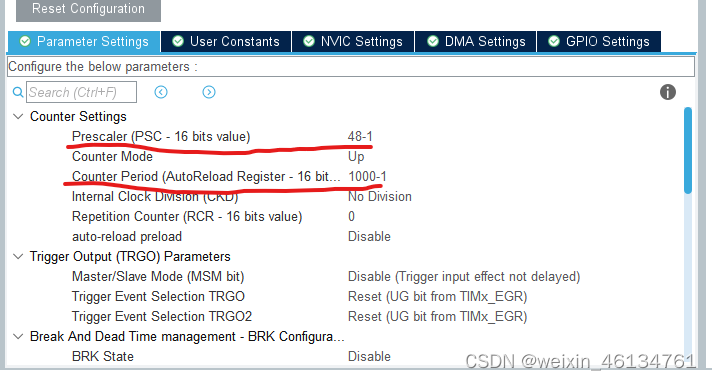
stm32g030的系统时钟频率是48mhz。分频后tim为1mhz,周期为1000,对应1ms。
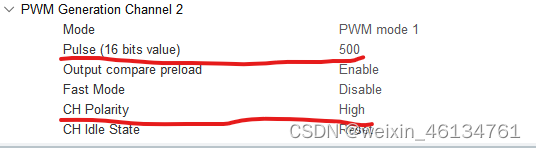
有效电平持续时间500,对应0.5ms。有效电平为高电平。
然后生成LL库的TIM代码。代码如下。
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
LL_TIM_InitTypeDef TIM_InitStruct = {0};
LL_TIM_OC_InitTypeDef TIM_OC_InitStruct = {0};
LL_TIM_BDTR_InitTypeDef TIM_BDTRInitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Peripheral clock enable */
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_TIM1);
/* TIM1 interrupt Init */
NVIC_SetPriority(TIM1_BRK_UP_TRG_COM_IRQn, 0);
NVIC_EnableIRQ(TIM1_BRK_UP_TRG_COM_IRQn);
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
TIM_InitStruct.Prescaler = 48-1;
TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
TIM_InitStruct.Autoreload = 1000-1;
TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
TIM_InitStruct.RepetitionCounter = 0;
LL_TIM_Init(TIM1, &TIM_InitStruct);
LL_TIM_DisableARRPreload(TIM1);
LL_TIM_SetClockSource(TIM1, LL_TIM_CLOCKSOURCE_INTERNAL);
LL_TIM_OC_EnablePreload(TIM1, LL_TIM_CHANNEL_CH2);
TIM_OC_InitStruct.OCMode = LL_TIM_OCMODE_PWM1;
TIM_OC_InitStruct.OCState = LL_TIM_OCSTATE_DISABLE;
TIM_OC_InitStruct.OCNState = LL_TIM_OCSTATE_DISABLE;
TIM_OC_InitStruct.CompareValue = 500;
TIM_OC_InitStruct.OCPolarity = LL_TIM_OCPOLARITY_HIGH;
TIM_OC_InitStruct.OCNPolarity = LL_TIM_OCPOLARITY_HIGH;
TIM_OC_InitStruct.OCIdleState = LL_TIM_OCIDLESTATE_LOW;
TIM_OC_InitStruct.OCNIdleState = LL_TIM_OCIDLESTATE_LOW;
LL_TIM_OC_Init(TIM1, LL_TIM_CHANNEL_CH2, &TIM_OC_InitStruct);
LL_TIM_OC_DisableFast(TIM1, LL_TIM_CHANNEL_CH2);
LL_TIM_SetTriggerOutput(TIM1, LL_TIM_TRGO_RESET);
LL_TIM_SetTriggerOutput2(TIM1, LL_TIM_TRGO2_RESET);
LL_TIM_DisableMasterSlaveMode(TIM1);
TIM_BDTRInitStruct.OSSRState = LL_TIM_OSSR_DISABLE;
TIM_BDTRInitStruct.OSSIState = LL_TIM_OSSI_DISABLE;
TIM_BDTRInitStruct.LockLevel = LL_TIM_LOCKLEVEL_OFF;
TIM_BDTRInitStruct.DeadTime = 0;
TIM_BDTRInitStruct.BreakState = LL_TIM_BREAK_DISABLE;
TIM_BDTRInitStruct.BreakPolarity = LL_TIM_BREAK_POLARITY_HIGH;
TIM_BDTRInitStruct.BreakFilter = LL_TIM_BREAK_FILTER_FDIV1;
TIM_BDTRInitStruct.BreakAFMode = LL_TIM_BREAK_AFMODE_INPUT;
TIM_BDTRInitStruct.Break2State = LL_TIM_BREAK2_DISABLE;
TIM_BDTRInitStruct.Break2Polarity = LL_TIM_BREAK2_POLARITY_HIGH;
TIM_BDTRInitStruct.Break2Filter = LL_TIM_BREAK2_FILTER_FDIV1;
TIM_BDTRInitStruct.Break2AFMode = LL_TIM_BREAK_AFMODE_INPUT;
TIM_BDTRInitStruct.AutomaticOutput = LL_TIM_AUTOMATICOUTPUT_DISABLE;
LL_TIM_BDTR_Init(TIM1, &TIM_BDTRInitStruct);
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOB);
/**TIM1 GPIO Configuration
PB3 ------> TIM1_CH2
*/
GPIO_InitStruct.Pin = LL_GPIO_PIN_3;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_1;
LL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}此初始化代码完成了基本的参数配置,没有启动定时器,所以只调用MX_TIM1_Init()函数,无法产生PWM波。
增加启动代码。
/**
* @brief None
* @param None
* @retval None
*/
void Timer1Ch2Start( void )
{
MX_TIM1_Init();
LL_TIM_CC_EnableChannel( TIM1 , LL_TIM_CHANNEL_CH2 );
LL_TIM_EnableAllOutputs( TIM1 ); //只有Timer1等高级定时器需要,必须放置在LL_TIM_BDTR_Init(TIM1, &TIM_BDTRInitStruct);之后。
LL_TIM_EnableCounter( TIM1 );
LL_TIM_GenerateEvent_UPDATE( TIM1 );
}
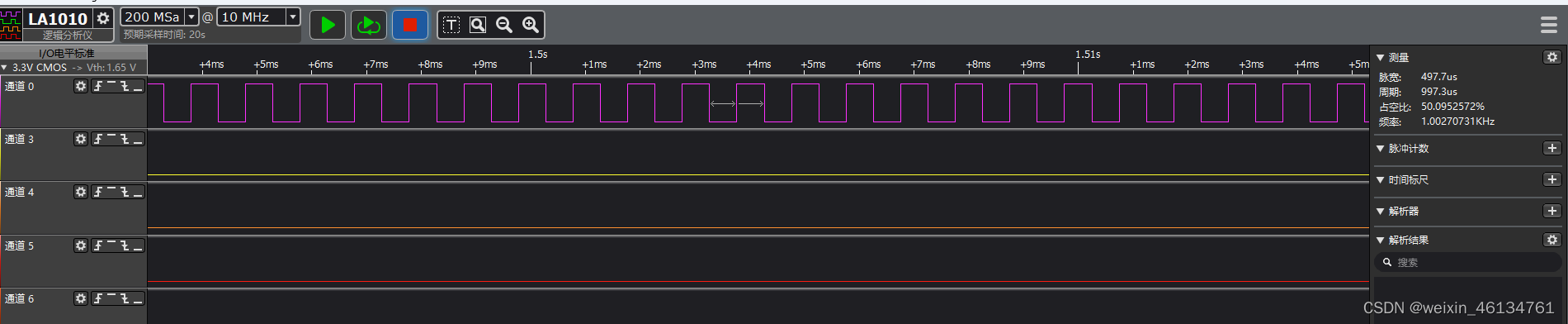
二、使用逻辑分析仪监测配置结果。
使用的是内部时钟,时间的准确性较差。















 1443
1443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









