







(一)自适应Hopf(霍普夫)振荡器基本原理与仿真
链接: link
(二)自适应Hopf(霍普夫)振荡器基本原理与仿真
链接: link
(三)自适应Hopf(霍普夫)振荡器基本原理与仿真
链接: link
前言
第一节我们描述了一般的Hopf振荡器基本形式,但是我们在实际使用中,不论是四足抑或是外骨骼等系统的步态都不是一尘不变的,为了是实现不同人体、系统的协调运作,需要考虑频率自适应与学习问题。
一、自适应Hopf振荡器原理
自适应Hopf振荡器在原本Hopf振荡器的基础上加入了扰动干预与周期学习部分,我们一个一个来看:
(1)加入扰动干预效果
加入扰动之后的数学模型如下所示:
x
˙
=
γ
(
μ
−
r
2
)
−
ω
y
+
ε
F
\dot{x} = \gamma (\mu -r^{2})-\omega y+\varepsilon F
x˙=γ(μ−r2)−ωy+εF
y
˙
=
γ
(
μ
−
r
2
)
+
ω
x
\dot{y} = \gamma(\mu -r^{2})+\omega x
y˙=γ(μ−r2)+ωx
其中,
γ
\gamma
γ为跟随速度(我理解的是类似于比例调节),
μ
\mu
μ为极限环半径,
r
=
x
2
+
y
2
r=\sqrt{x^{2}+y^{2}}
r=x2+y2,
ω
\omega
ω为系统固有频率,
ε
\varepsilon
ε为扰动系数,
F
F
F为具体加入的扰动。
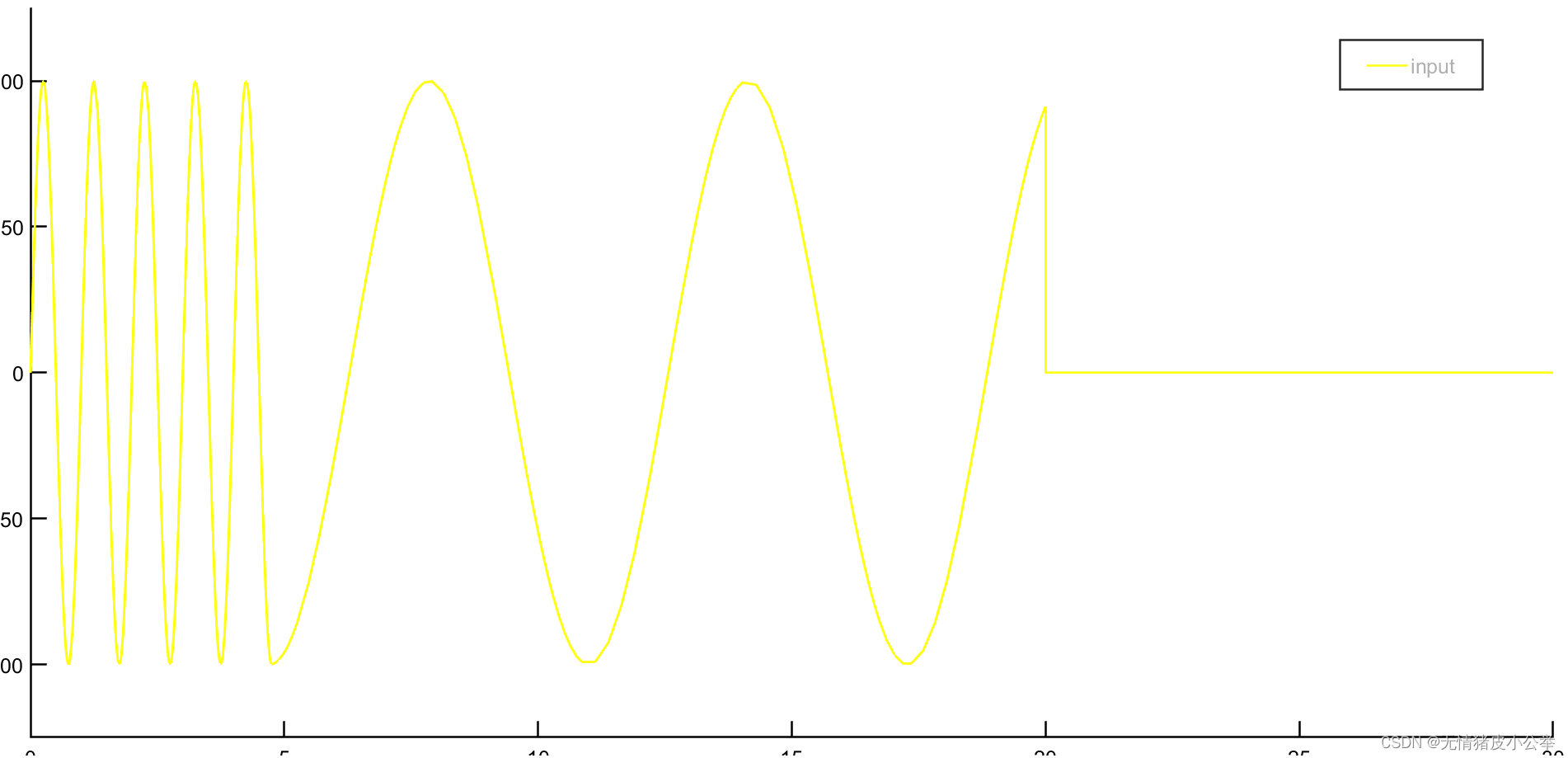
设计如下输入:
function y = fcn(u)
if u<4.75
y = sin(u/0.5*pi);
elseif u<20
y = sin(u);
else
y = 0;
end
具体波形如下所示:
μ
\mu
μ取值1,
ω
\omega
ω取值
π
\pi
π,
ε
\varepsilon
ε取值100,
ε
\varepsilon
ε取值100。加入扰动
F
F
F后结果如下:
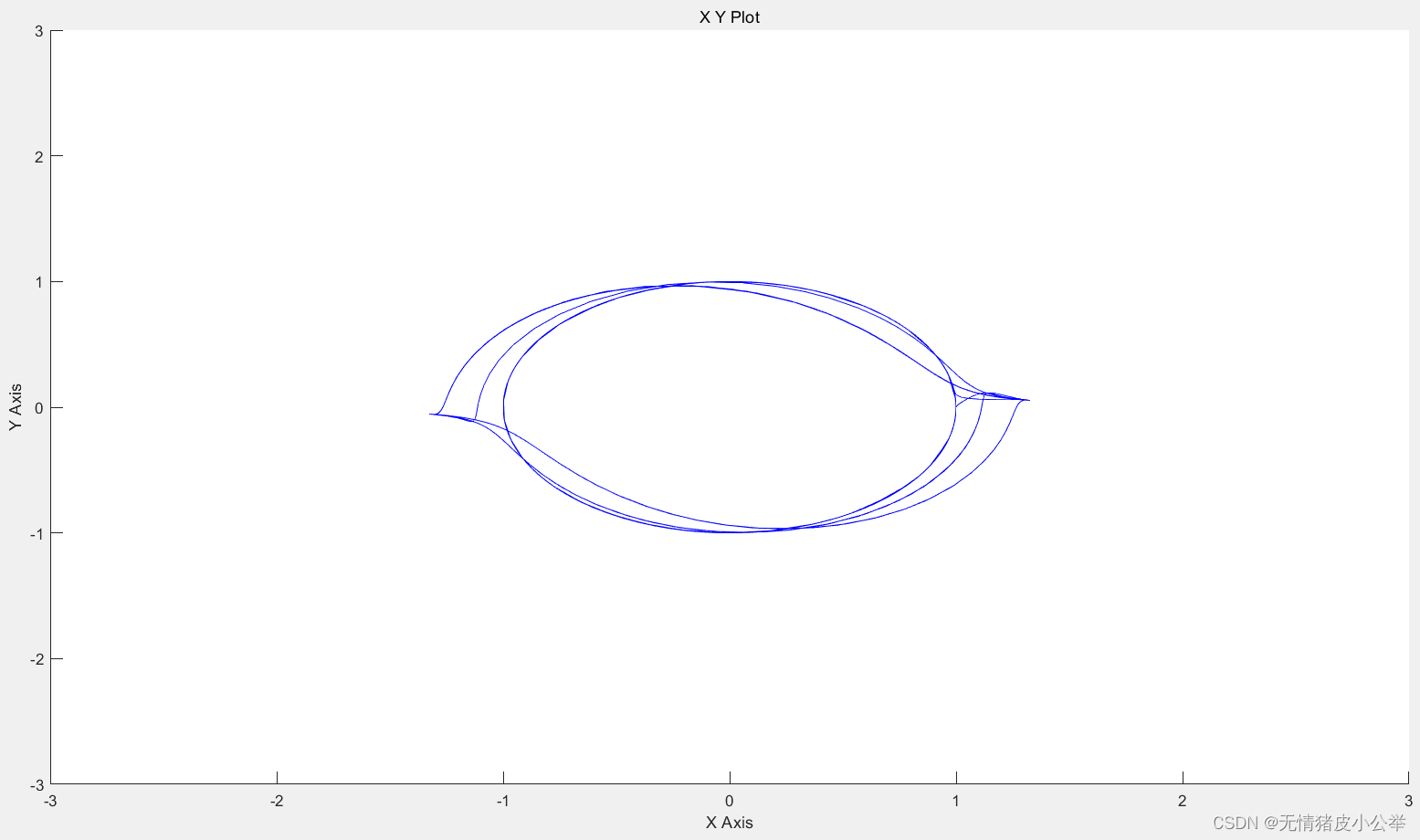

其中,黄色为x输出,蓝色为y输出,可以看出他们的周期完全跟随输入扰动 F F F,单当去除扰动时(t=20~30s),振荡器又会恢复到固有频率 ω \omega ω。
(2)加入扰动干预与频率学习效果
如何实现去除扰动后还能够保持最后扰动消失时候的频率呢?这就需要加入频率学习的内容。
加入扰动与频率学习之后的数学模型如下所示:
x
˙
=
γ
(
μ
−
r
2
)
−
ω
y
+
ε
F
\dot{x} = \gamma (\mu -r^{2})-\omega y+\varepsilon F
x˙=γ(μ−r2)−ωy+εF
y
˙
=
γ
(
μ
−
r
2
)
+
ω
x
\dot{y} = \gamma(\mu -r^{2})+\omega x
y˙=γ(μ−r2)+ωx
ω
˙
=
−
ε
F
y
/
r
\dot{\omega} = -\varepsilon F y/r
ω˙=−εFy/r
保持原输入不变,可得:
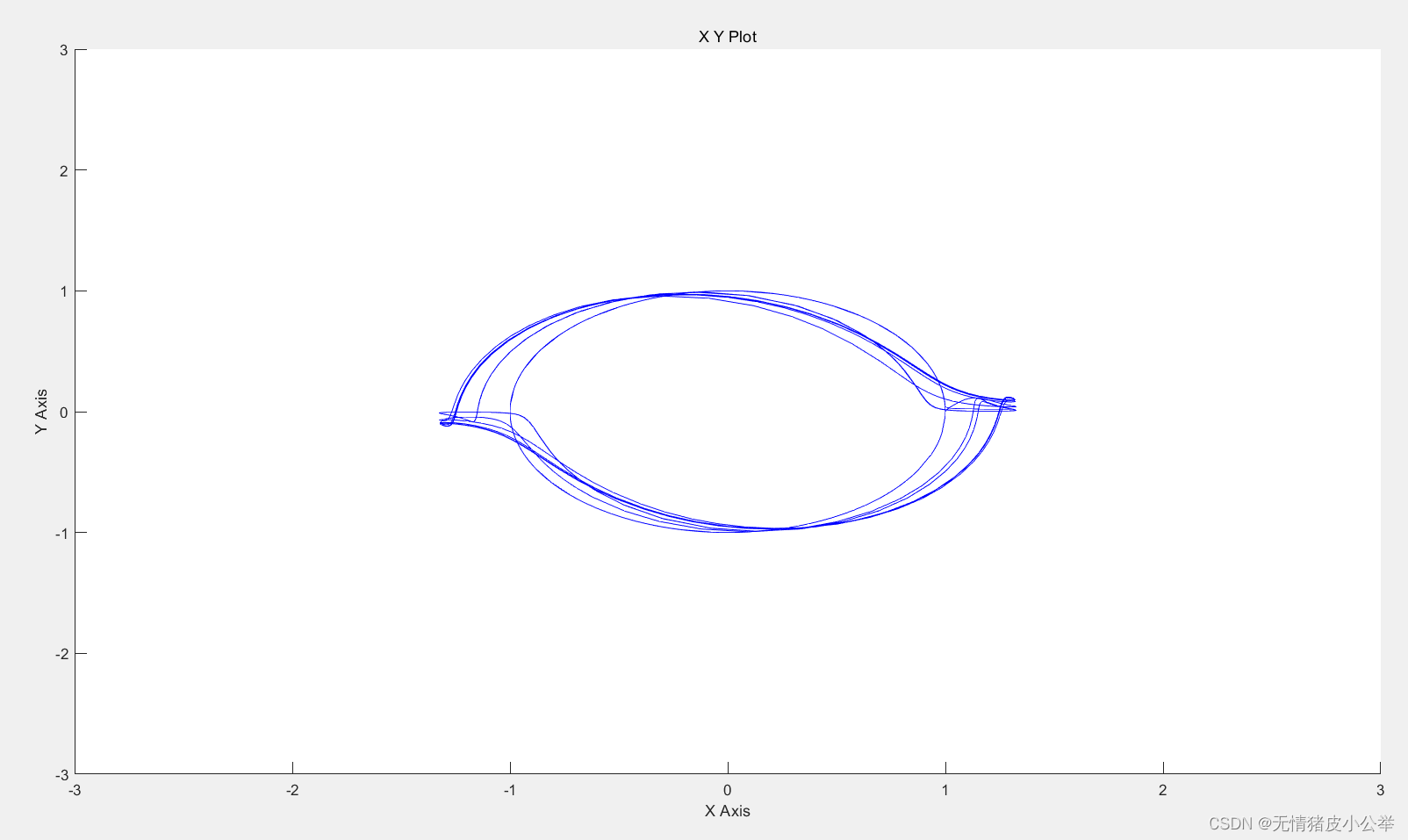
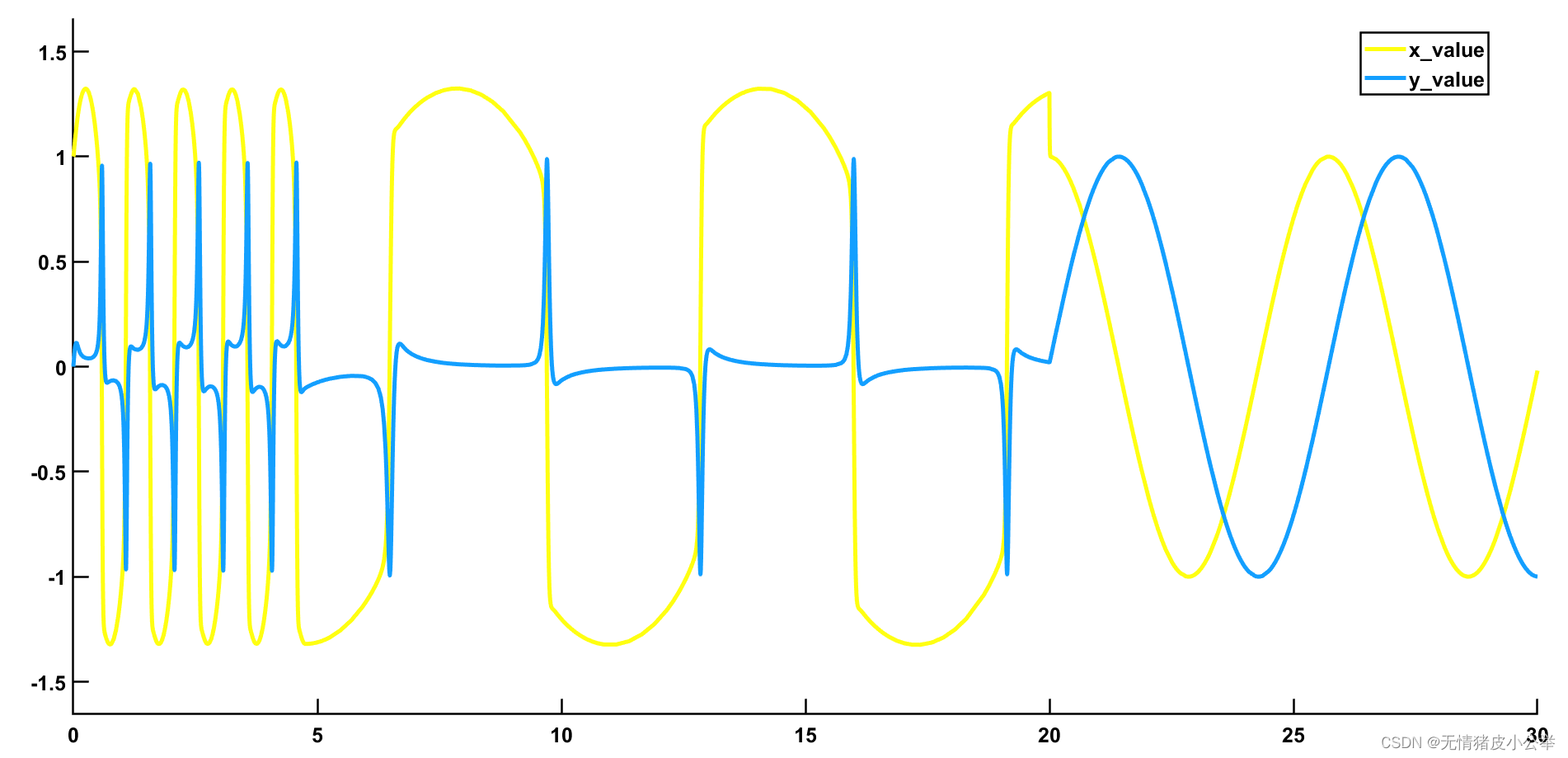
其中,黄色为x输出,蓝色为y输出,可以看出他们的周期完全跟随输入扰动
F
F
F,单当去除扰动时(t=20~30s),振荡器基本保持频率
2
p
i
2pi
2pi。
具体频率学习变化图像如下所示:
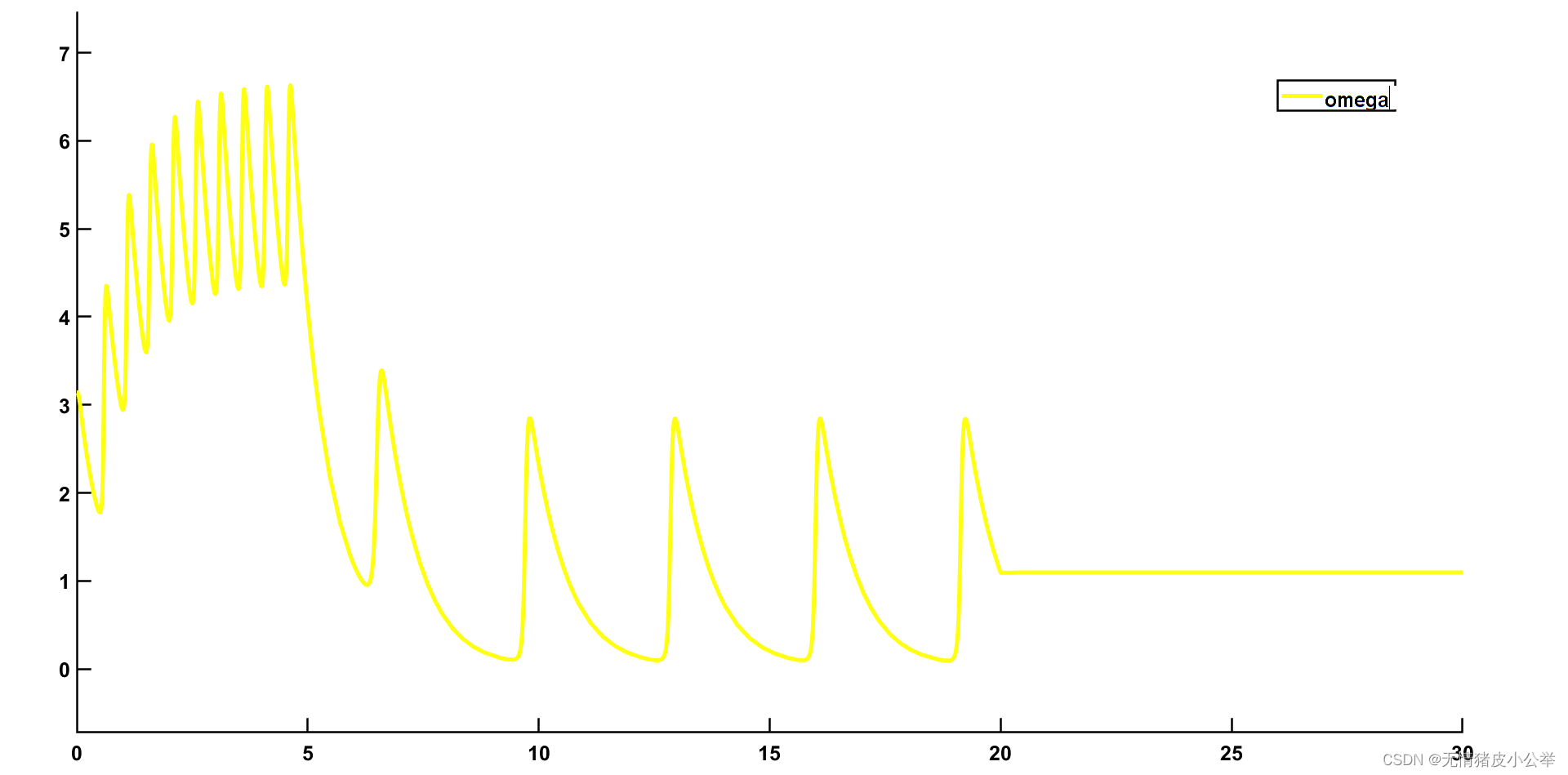
输入频率变化值为:
2
p
i
2pi
2pi ~ 1 ~ 0,可以看出有靠近的趋势,在20s之后基本可以保持频率为1。但是存在很严重的震动效果,个人认为是参数没调好。
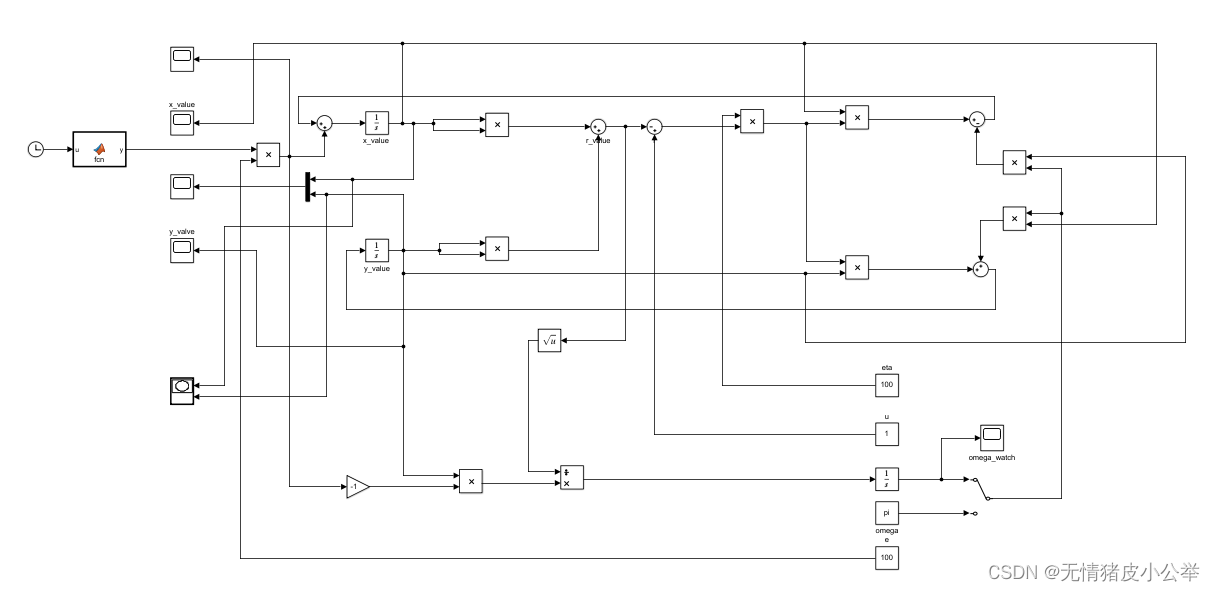
具体仿真图像如下:















 3218
3218











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









