







引脚信息:
| stm32f407 | OV2640 |
|---|---|
| 3.3V | VCC |
| PG15 | RST |
| PG9 | PWDN |
| PA4 | HREF |
| PD7 | SCCB_SDA (开漏输出,上拉,开漏输出的时候(=1), 也可以读取外部信号的高低电平) |
| PD6 | SCCB_SCL (推挽输出) |
| PC6 | D0(DCMI) |
| PC7 | D1(DCMI) |
| PC8 | D2(DCMI) |
| PC9 | D3(DCMI) |
| PC11 | D4(DCMI) |
| PB6 | D5(DCMI) |
| PE5 | D6(DCMI) |
| PE6 | D7(DCMI) |
| PA6 | CLK |
| PG9 | PWDN |
| PB7 | VSYNC |
| PA8 | XCLK(NC) |
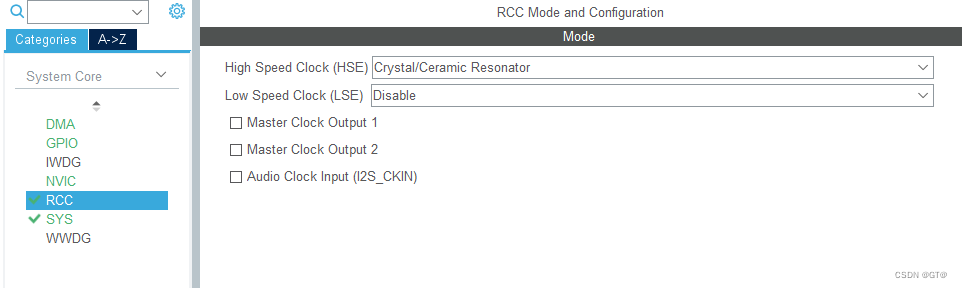
一、STM32CUBEMX的配置
使能RCC、SYS常规配置
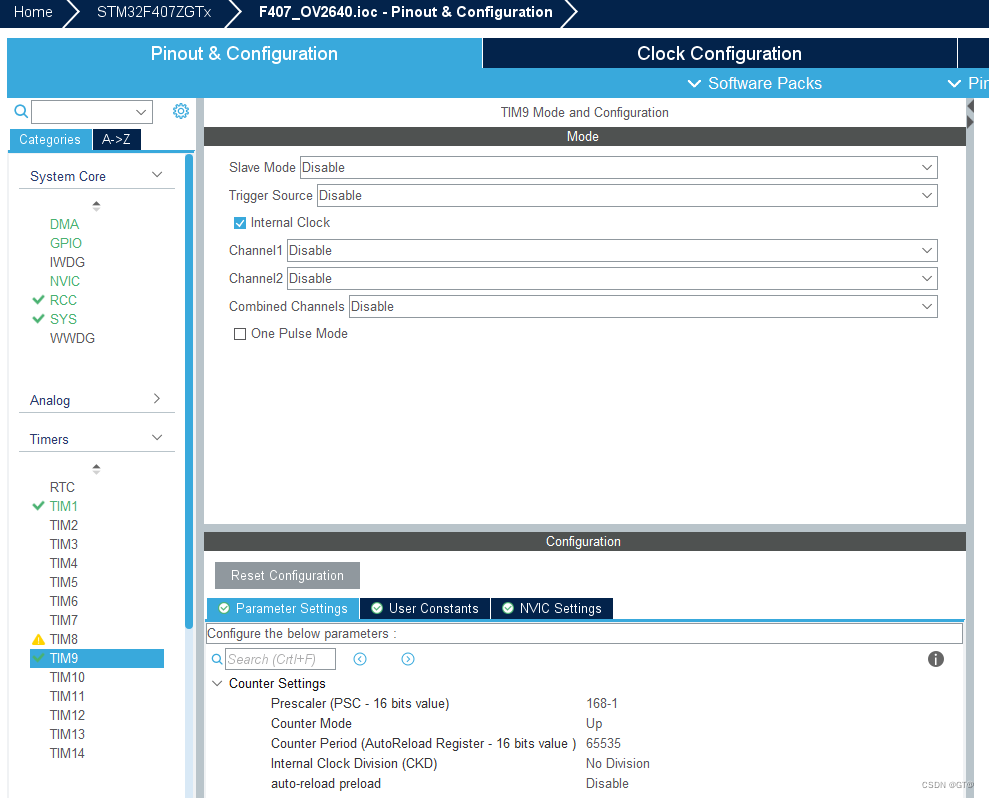
TIM9用做微秒延时定时器
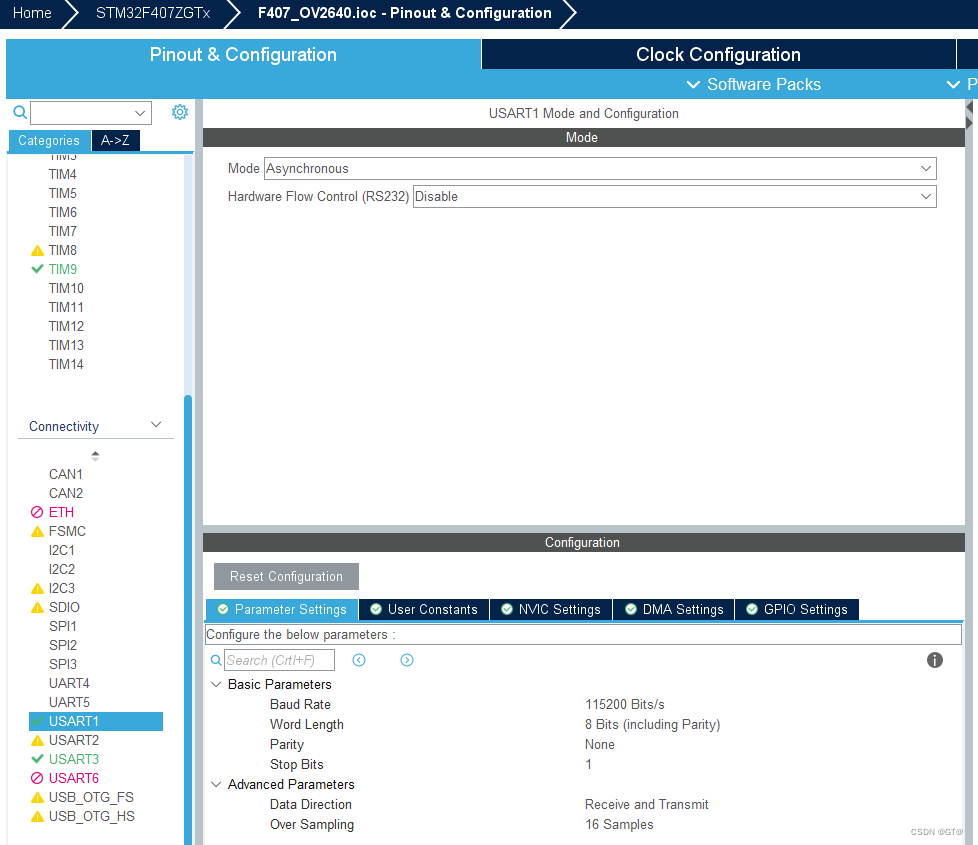
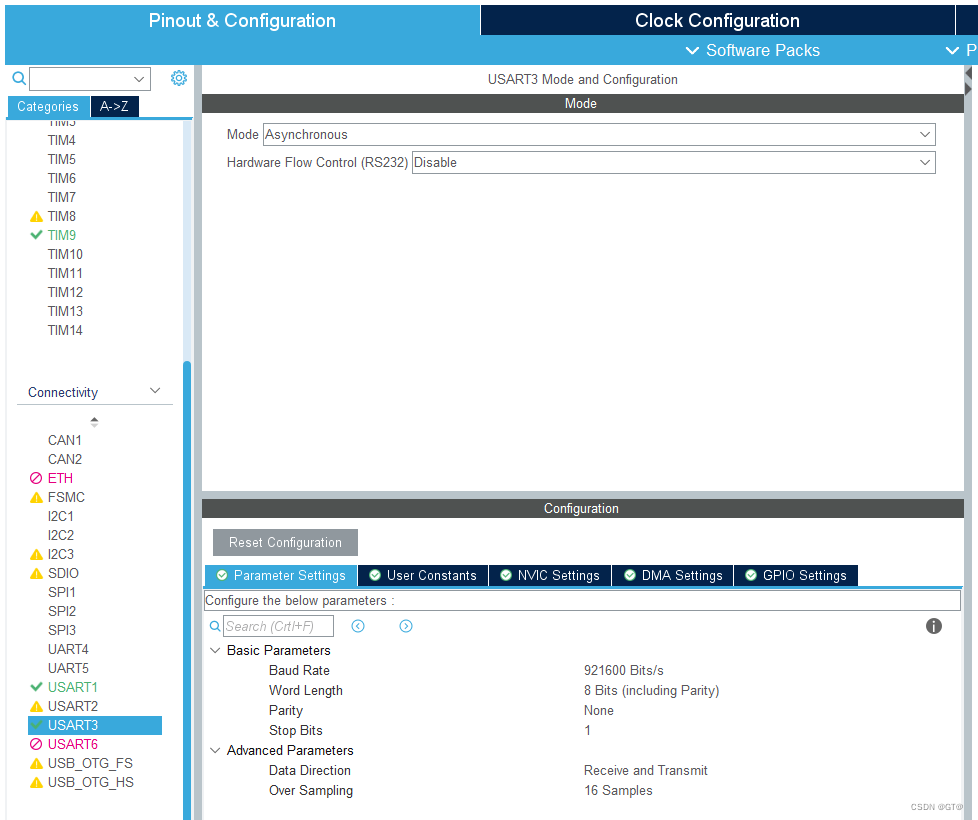
串口1用做打印输出
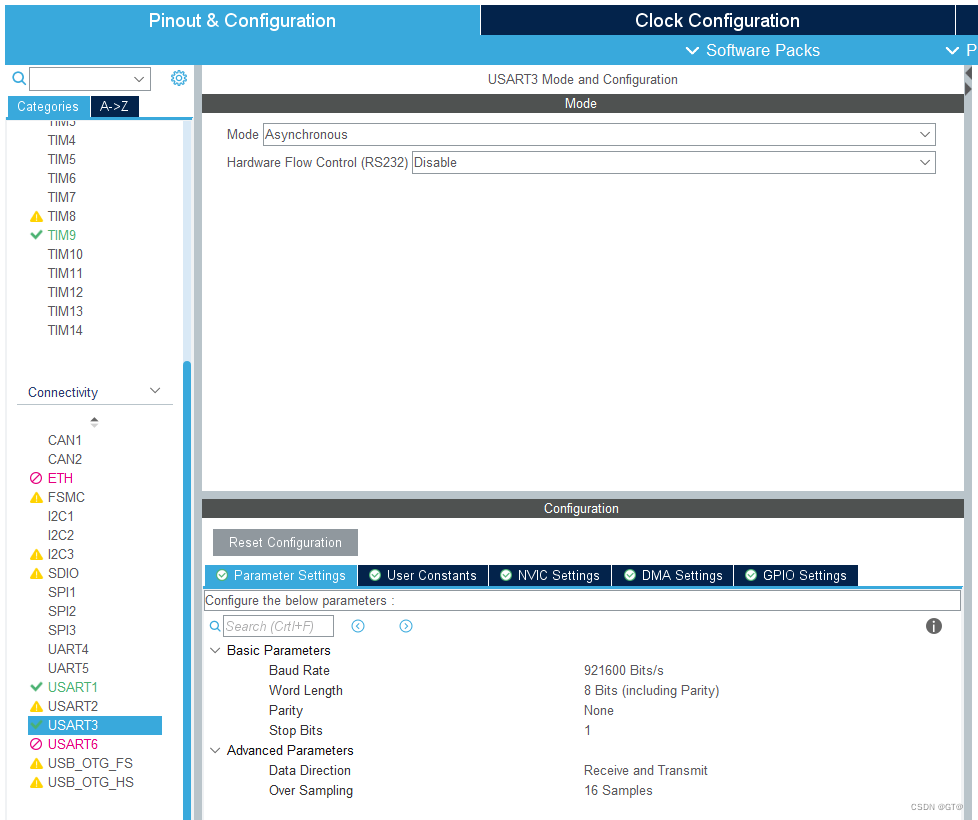
串口3用做DCMI数据传输到上位机
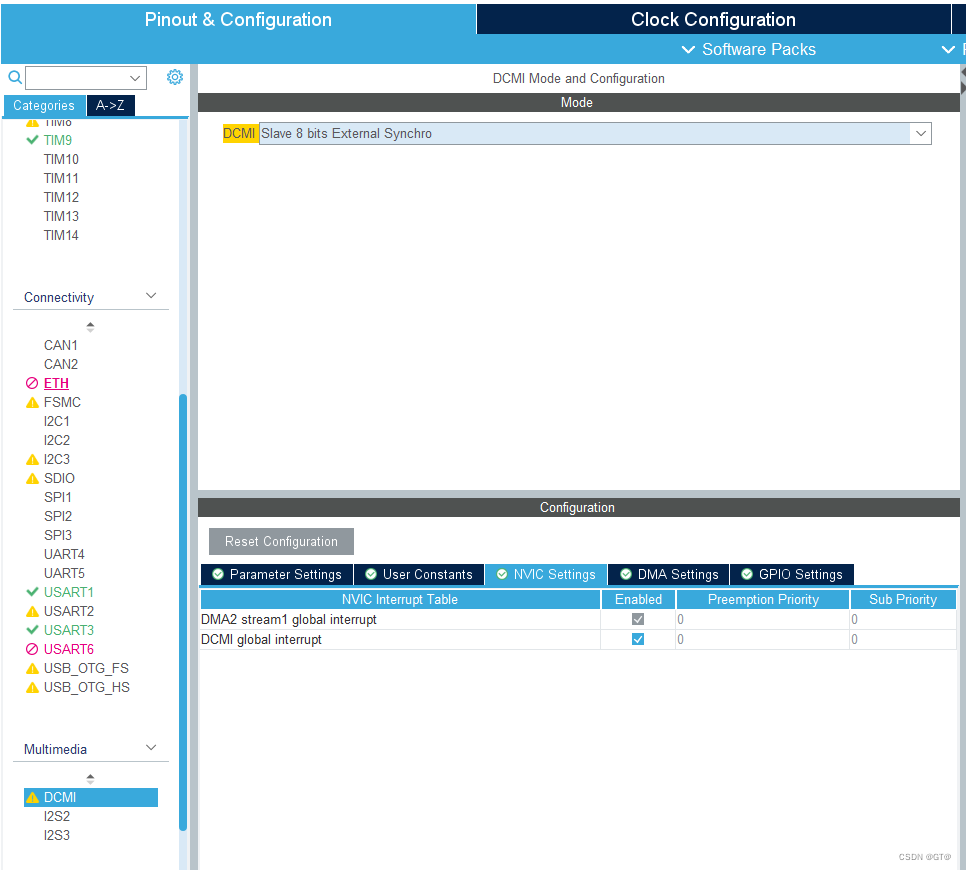
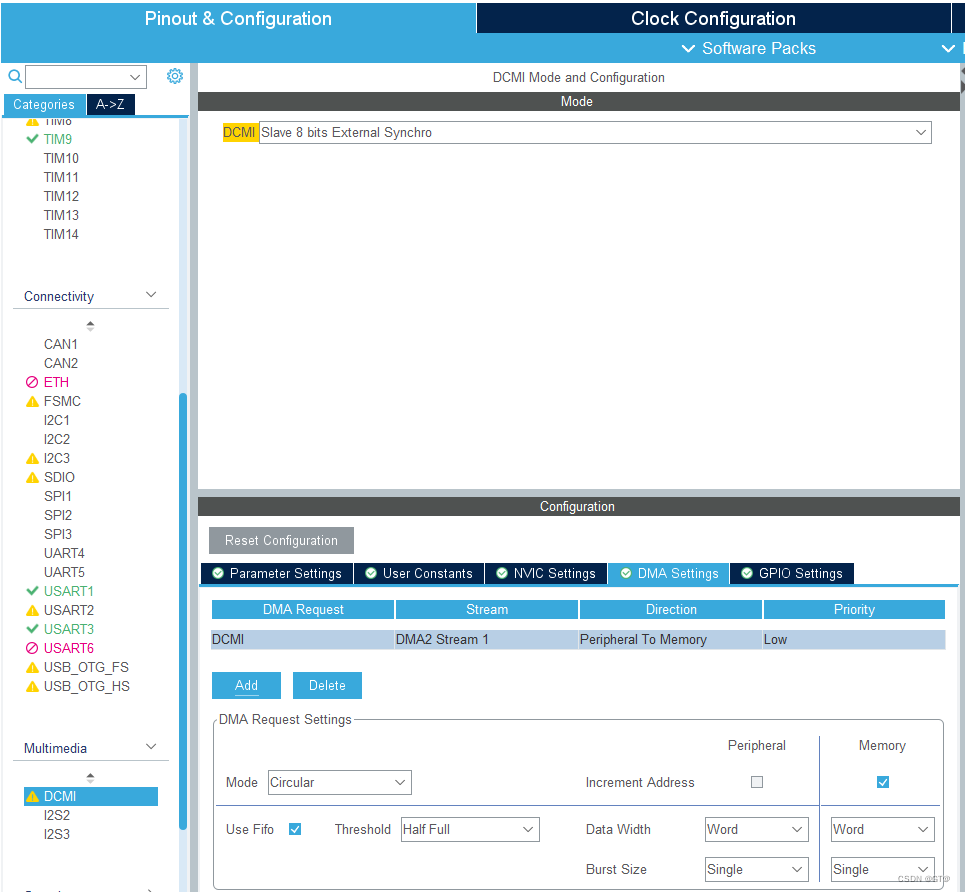
DCMI的配置
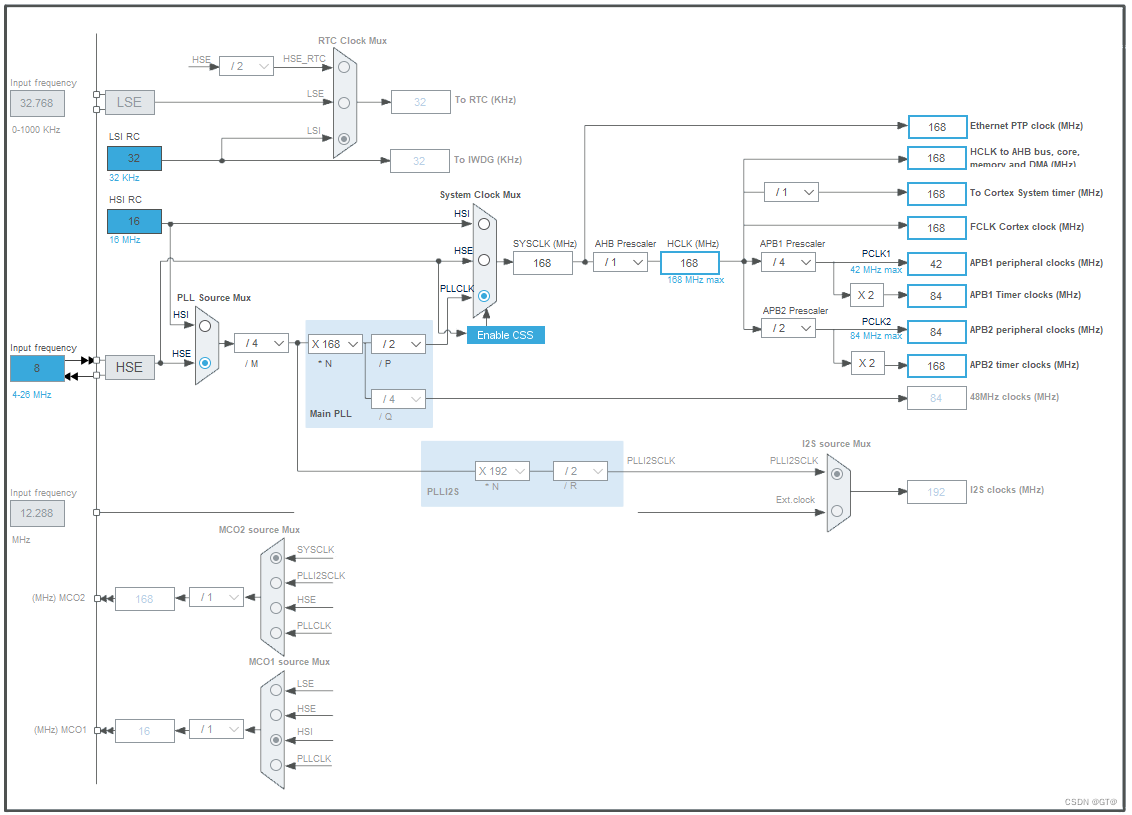
时钟树:
选择SW4STM32用CLION打开
二、使用步骤
1.移植OV2640驱动
驱动代码几乎来自正点原子例程:
ov2640.c:
#include "main.h"
#include "sccb.h"
#include "ov2640.h"
#include "ov2640cfg.h"
#include "usart.h"
#include "tim.h"
/**
* @brief OV2640 读寄存器
* @param reg : 寄存器地址
* @retval 读到的寄存器值
*/
uint8_t ov2640_read_reg(uint16_t reg) {
uint8_t data = 0;
sccb_start(); /* 启动SCCB传输 */
sccb_send_byte(OV2640_ADDR); /* 写器件ADDR */
delay_us(100);
sccb_send_byte(reg); /* 写寄存器地址 */
delay_us(100);
sccb_stop();
delay_us(100);
/* 设置寄存器地址后,才是读 */
sccb_start();
sccb_send_byte(OV2640_ADDR | 0x01); /* 发送读命令 */
delay_us(100);
data = sccb_read_byte(); /* 读取数据 */
sccb_nack();
sccb_stop();
return data;
}
/**
* @brief OV2640 写寄存器
* @param reg : 寄存器地址
* @param data: 要写入寄存器的值
* @retval 0, 成功; 1, 失败;
*/
uint8_t ov2640_write_reg(uint16_t reg, uint8_t data) {
uint8_t res = 0;
sccb_start(); /* 启动SCCB传输 */
delay_us(100);
if (sccb_send_byte(OV2640_ADDR))res = 1;/* 写器件ID */
delay_us(100);
if (sccb_send_byte(reg))res = 1; /* 写寄存器地址 */
delay_us(100);
if (sccb_send_byte(data))res = 1; /* 写数据 */
delay_us(100);
sccb_stop();
return res;
}
/**
* @brief 初始化 OV2640
* @param 无
* @retval 0, 成功; 1, 失败;
*/
uint8_t ov2640_init(void) {
uint16_t i = 0;
uint16_t reg;
OV2640_PWDN(0);
HAL_Delay(10);
OV2640_RST(0);
/* 必须先拉低OV2640的RST脚,再上电 */
HAL_Delay(20);
OV2640_RST(1); /* 结束复位 */
HAL_Delay(20);
sccb_init(); /* 初始化SCCB 的IO口 */
HAL_Delay(5);
ov2640_write_reg(OV2640_DSP_RA_DLMT, 0x01); /* 操作sensor寄存器 */
ov2640_write_reg(OV2640_SENSOR_COM7, 0x80); /* 软复位OV2640 */
HAL_Delay(50);
reg = ov2640_read_reg(OV2640_SENSOR_MIDH); /* 读取厂家ID 高八位 */
reg <<= 8;
reg |= ov2640_read_reg(OV2640_SENSOR_MIDL); /* 读取厂家ID 低八位 */
if (reg != OV2640_MID) /* ID 是否正常 */
{
printf("MID:%d\r\n", reg);
return 1; /* 失败 */
}
reg = ov2640_read_reg(OV2640_SENSOR_PIDH); /* 读取厂家ID 高八位 */
reg <<= 8;
reg |= ov2640_read_reg(OV2640_SENSOR_PIDL); /* 读取厂家ID 低八位 */
if (reg != OV2640_PID) /* ID是否正常 */
{
printf("HID:%d\r\n", reg);
return 1; /* 失败 */
}
/* 初始化 OV2640 */
for (i = 0; i < sizeof(ov2640_uxga_init_reg_tbl) / 2; i++) {
ov2640_write_reg(ov2640_uxga_init_reg_tbl[i][0], ov2640_uxga_init_reg_tbl[i][1]);
}
printf("OV2640初始化完成\r\n");
return 0; /* OV2640初始化完成 */
}
/**
* @brief OV2640 切换为JPEG模式
* @param 无
* @retval 无
*/
void ov2640_jpeg_mode(void) {
uint16_t i = 0;
/* 设置:YUV422格式 */
for (i = 0; i < (sizeof(ov2640_yuv422_reg_tbl) / 2); i++) {
ov2640_write_reg(ov2640_yuv422_reg_tbl[i][0], ov2640_yuv422_reg_tbl[i][1]); /* 发送配置数组 */
}
/* 设置:输出JPEG数据 */
for (i = 0; i < (sizeof(ov2640_jpeg_reg_tbl) / 2); i++) {
ov2640_write_reg(ov2640_jpeg_reg_tbl[i][0], ov2640_jpeg_reg_tbl[i][1]); /* 发送配置数组 */
}
}
/**
* @brief OV2640 切换为RGB565模式
* @param 无
* @retval 无
*/
void ov2640_rgb565_mode(void) {
uint16_t i = 0;
/* 设置:RGB565输出 */
for (i = 0; i < (sizeof(ov2640_rgb565_reg_tbl) / 4); i++) {
ov2640_write_reg(ov2640_rgb565_reg_tbl[i][0], ov2640_rgb565_reg_tbl[i][1]); /* 发送配置数组 */
}
}
/* 自动曝光设置参数表,支持5个等级 */
const static uint8_t OV2640_AUTOEXPOSURE_LEVEL[5][8] =
{
{
0xFF, 0x01,
0x24, 0x20,
0x25, 0x18,
0x26, 0x60,
},
{
0xFF, 0x01,
0x24, 0x34,
0x25, 0x1c,
0x26, 0x00,
},
{
0xFF, 0x01,
0x24, 0x3e,
0x25, 0x38,
0x26, 0x81,
},
{
0xFF, 0x01,
0x24, 0x48,
0x25, 0x40,
0x26, 0x81,
},
{
0xFF, 0x01,
0x24, 0x58,
0x25, 0x50,
0x26, 0x92,
},
};
/**
* @brief OV2640 EV曝光补偿
* @param level : 0~4
* @retval 无
*/
void ov2640_auto_exposure(uint8_t level) {
uint8_t i;
uint8_t *p = (uint8_t *) OV2640_AUTOEXPOSURE_LEVEL[level];
for (i = 0; i < 4; i++) {
ov2640_write_reg(p[i * 2], p[i * 2 + 1]);
}
}
/**
* @brief OV2640 白平衡设置
* @param mode : 0~4, 白平衡模式
* @arg 0: 自动 auto
* @arg 1: 日光 sunny
* @arg 2: 办公室 office
* @arg 3: 阴天 cloudy
* @arg 4: 家里 home
* @retval 无
*/
void ov2640_light_mode(uint8_t mode) {
uint8_t regccval = 0x5E;/* Sunny */
uint8_t regcdval = 0x41;
uint8_t regceval = 0x54;
switch (mode) {
case 0: /* auto */
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0xC7, 0x00); /* AWB ON */
return;
case 2: /* cloudy */
regccval = 0x65;
regcdval = 0x41;
regceval = 0x4F;
break;
case 3: /* office */
regccval = 0x52;
regcdval = 0x41;
regceval = 0x66;
break;
case 4: /* home */
regccval = 0x42;
regcdval = 0x3F;
regceval = 0x71;
break;
default :
break;
}
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0xC7, 0x40); /* AWB OFF */
ov2640_write_reg(0xCC, regccval);
ov2640_write_reg(0xCD, regcdval);
ov2640_write_reg(0xCE, regceval);
}
/**
* @brief OV2640 色彩饱和度设置
* @param set : 0~4, 代表色彩饱和度 -2 ~ 2.
* @retval 无
*/
void ov2640_color_saturation(uint8_t sat) {
uint8_t reg7dval = ((sat + 2) << 4) | 0x08;
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0x7C, 0x00);
ov2640_write_reg(0x7D, 0x02);
ov2640_write_reg(0x7C, 0x03);
ov2640_write_reg(0x7D, reg7dval);
ov2640_write_reg(0x7D, reg7dval);
}
/**
* @brief OV2640 亮度设置
* @param bright : 0~5, 代表亮度 -2 ~ 2.
* @retval 无
*/
void ov2640_brightness(uint8_t bright) {
ov2640_write_reg(0xff, 0x00);
ov2640_write_reg(0x7c, 0x00);
ov2640_write_reg(0x7d, 0x04);
ov2640_write_reg(0x7c, 0x09);
ov2640_write_reg(0x7d, bright << 4);
ov2640_write_reg(0x7d, 0x00);
}
/**
* @brief OV2640 对比度设置
* @param contrast : 0~4, 代表对比度 -2 ~ 2.
* @retval 无
*/
void ov2640_contrast(uint8_t contrast) {
uint8_t reg7d0val = 0x20; /* 默认为普通模式 */
uint8_t reg7d1val = 0x20;
switch (contrast) {
case 0:
reg7d0val = 0x18; /* -2 */
reg7d1val = 0x34;
break;
case 1:
reg7d0val = 0x1C; /* -1 */
reg7d1val = 0x2A;
break;
case 3:
reg7d0val = 0x24; /* 1 */
reg7d1val = 0x16;
break;
case 4:
reg7d0val = 0x28; /* 2 */
reg7d1val = 0x0C;
break;
default :
break;
}
ov2640_write_reg(0xff, 0x00);
ov2640_write_reg(0x7c, 0x00);
ov2640_write_reg(0x7d, 0x04);
ov2640_write_reg(0x7c, 0x07);
ov2640_write_reg(0x7d, 0x20);
ov2640_write_reg(0x7d, reg7d0val);
ov2640_write_reg(0x7d, reg7d1val);
ov2640_write_reg(0x7d, 0x06);
}
/**
* @brief OV2640 特效设置
* @param eft : 0~6, 特效效果
* @arg 0: 正常
* @arg 1: 负片
* @arg 2: 黑白
* @arg 3: 偏红色
* @arg 4: 偏绿色
* @arg 5: 偏蓝色
* @arg 6: 复古
* @retval 无
*/
void ov2640_special_effects(uint8_t eft) {
uint8_t reg7d0val = 0x00; /* 默认为普通模式 */
uint8_t reg7d1val = 0x80;
uint8_t reg7d2val = 0x80;
switch (eft) {
case 1: /* 负片 */
reg7d0val = 0x40;
break;
case 2: /* 黑白 */
reg7d0val = 0x18;
break;
case 3: /* 偏红色 */
reg7d0val = 0x18;
reg7d1val = 0x40;
reg7d2val = 0xC0;
break;
case 4: /* 偏绿色 */
reg7d0val = 0x18;
reg7d1val = 0x40;
reg7d2val = 0x40;
break;
case 5: /* 偏蓝色 */
reg7d0val = 0x18;
reg7d1val = 0xA0;
reg7d2val = 0x40;
break;
case 6: /* 复古 */
reg7d0val = 0x18;
reg7d1val = 0x40;
reg7d2val = 0xA6;
break;
}
ov2640_write_reg(0xff, 0x00);
ov2640_write_reg(0x7c, 0x00);
ov2640_write_reg(0x7d, reg7d0val);
ov2640_write_reg(0x7c, 0x05);
ov2640_write_reg(0x7d, reg7d1val);
ov2640_write_reg(0x7d, reg7d2val);
}
/**
* @brief OV2640 彩条测试
* @param mode : 0~2
* @arg 0: 关闭
* @arg 1: 彩条
* @retval 无
*/
void ov2640_color_bar(uint8_t mode) {
uint8_t reg;
ov2640_write_reg(0xFF, 0x01);
reg = ov2640_read_reg(0x12);
reg &= ~(1 << 1);
if (mode)reg |= 1 << 1;
ov2640_write_reg(0x12, reg);
}
/**
* @bref 设置传感器输出窗口
* @param sx : 起始地址x
* @param sy : 起始地址y
* @param width : 宽度(对应:horizontal)
* @param hight : 高度(对应:vertical)
* @retval 无
*/
void ov2640_window_set(uint16_t sx, uint16_t sy, uint16_t width, uint16_t height) {
uint16_t endx;
uint16_t endy;
uint8_t temp;
endx = sx + width / 2;
endy = sy + height / 2;
ov2640_write_reg(0xFF, 0x01);
temp = ov2640_read_reg(0x03); /* 读取Vref之前的值 */
temp &= 0xF0;
temp |= ((endy & 0x03) << 2) | (sy & 0x03);
ov2640_write_reg(0x03, temp); /* 设置Vref的start和end的最低2位 */
ov2640_write_reg(0x19, sy >> 2); /* 设置Vref的start高8位 */
ov2640_write_reg(0x1A, endy >> 2); /* 设置Vref的end的高8位 */
temp = ov2640_read_reg(0x32); /* 读取Href之前的值 */
temp &= 0xC0;
temp |= ((endx & 0x07) << 3) | (sx & 0x07);
ov2640_write_reg(0x32, temp); /* 设置Href的start和end的最低3位 */
ov2640_write_reg(0x17, sx >> 3); /* 设置Href的start高8位 */
ov2640_write_reg(0x18, endx >> 3); /* 设置Href的end的高8位 */
}
/**
* @bref 设置图像输出大小
* @@param width : 宽度(对应:horizontal)
* @param height: 高度(对应:vertical)
* @note OV2640输出图像的大小(分辨率),完全由该函数确定
* width和height必须是4的倍数
* @retval 0 : 设置成功
* 其他 : 设置失败
*/
uint8_t ov2640_outsize_set(uint16_t width, uint16_t height) {
uint16_t outh;
uint16_t outw;
uint8_t temp;
if (width % 4) return 1;
if (height % 4) return 2;
outw = width / 4;
outh = height / 4;
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0xE0, 0x04);
ov2640_write_reg(0x5A, outw & 0xFF); /* 设置OUTW的低八位 */
ov2640_write_reg(0x5B, outh & 0xFF); /* 设置OUTH的低八位 */
temp = (outw >> 8) & 0x03;
temp |= (outh >> 6) & 0x04;
ov2640_write_reg(0x5C, temp); /* 设置OUTH/OUTW的高位 */
ov2640_write_reg(0xE0, 0x00);
return 0;
}
/**
* @brief 设置图像开窗大小
* @note OV2640输出图像的大小(分辨率),完全由该函数确定
* 由于开启了scale功能,用于输出的图像窗口为: xsize - 2 * offx, ysize - 2 * offy
* 实际输出(width,height), 是在: xsize - 2 * offx, ysize - 2 * offy的基础上进行缩放处理.
* 一般设置offx和offy的值为16和4,更小也是可以,不过默认是16和4
* @param offx,offy : 输出图像在ov2640_image_window_set设定窗口(假设长宽为xsize和ysize)上的偏移
* @param width,height : 实际输出图像的宽度和高度,必须是4的倍数
* @retval 0, 成功; 其他, 失败;
*/
uint8_t ov2640_image_win_set(uint16_t offx, uint16_t offy, uint16_t width, uint16_t height) {
uint16_t hsize;
uint16_t vsize;
uint8_t temp;
if (width % 4) return 1;
if (height % 4) return 2;
hsize = width / 4;
vsize = height / 4;
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0xE0, 0x04);
ov2640_write_reg(0x51, hsize & 0xFF); /* 设置H_SIZE的低八位 */
ov2640_write_reg(0x52, vsize & 0xFF); /* 设置V_SIZE的低八位 */
ov2640_write_reg(0x53, offx & 0xFF); /* 设置offx的低八位 */
ov2640_write_reg(0x54, offy & 0xFF); /* 设置offy的低八位 */
temp = (vsize >> 1) & 0x80;
temp |= (offy >> 4) & 0x70;
temp |= (hsize >> 5) & 0x08;
temp |= (offx >> 8) & 0x07;
ov2640_write_reg(0x55, temp); /* 设置H_SIZE/V_SIZE/OFFX,OFFY的高位 */
ov2640_write_reg(0x57, (hsize >> 2) & 0x80); /* 设置H_SIZE/V_SIZE/OFFX,OFFY的高位 */
ov2640_write_reg(0xE0, 0x00);
return 0;
}
/**
* @bref 该函数设置图像尺寸大小,也就是所选格式的输出分辨率
* @note UXGA:1600*1200,SVGA:800*600,CIF:352*288
* @param width : 图像宽度
* @param height : 图像高度
*
* @retval 0 : 设置成功
* 其他 : 设置失败
*/
uint8_t ov2640_imagesize_set(uint16_t width, uint16_t height) {
uint8_t temp;
ov2640_write_reg(0xFF, 0x00);
ov2640_write_reg(0xE0, 0x04);
ov2640_write_reg(0xC0, (width) >> 3 & 0xFF); /* 设置HSIZE的10:3位 */
ov2640_write_reg(0xC1, (height) >> 3 & 0xFF); /* 设置VSIZE的10:3位 */
temp = (width & 0x07) << 3;
temp |= height & 0x07;
temp |= (width >> 4) & 0x80;
ov2640_write_reg(0x8C, temp);
ov2640_write_reg(0xE0, 0x00);
return 0;
}
/**
* @bref 闪光灯外部信号控制
* @param sw : 0,关闭
* 1,打开
* @retval 无
*/
void ov2640_flash_extctrl(uint8_t sw) {
if (sw) OV2640_FLASH(1);
else
OV2640_FLASH(0);
}
/**
* @bref 闪光灯内部信号控制
* @note 控制信号从OV2640的STROBE引脚自动输出
* @retval 无
*/
void ov2640_flash_intctrl(void) {
ov2640_write_reg(0xFF, 0x01);
ov2640_write_reg(0x4B, 0x81);
ov2640_write_reg(0x4B, 0x01);
}
ov2640.h:
#ifndef _OV2640_H
#define _OV2640_H
#include "main.h"
/******************************************************************************************/
/* PWDN 引脚定义 */
#define OV_PWDN_GPIO_PORT GPIOG
#define OV_PWDN_GPIO_PIN GPIO_PIN_9
#define OV_PWDN_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOG_CLK_ENABLE(); }while(0) /* PG口时钟使能 */
/* RESET 引脚定义 */
#define OV_RESET_GPIO_PORT GPIOG
#define OV_RESET_GPIO_PIN GPIO_PIN_15
#define OV_RESET_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOG_CLK_ENABLE(); }while(0) /* PG口时钟使能 */
/* FLASH 引脚定义 */
#define OV_FLASH_GPIO_PORT GPIOA
#define OV_FLASH_GPIO_PIN GPIO_PIN_8
#define OV_FLASH_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
/******************************************************************************************/
/* IO控制函数 */
#define OV2640_PWDN(x) do{ x ? \
HAL_GPIO_WritePin(OV_PWDN_GPIO_PORT, OV_PWDN_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(OV_PWDN_GPIO_PORT, OV_PWDN_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* POWER DOWN控制信号 */
#define OV2640_RST(x) do{ x ? \
HAL_GPIO_WritePin(OV_RESET_GPIO_PORT, OV_RESET_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(OV_RESET_GPIO_PORT, OV_RESET_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* 复位控制信号 */
#define OV2640_FLASH(x) do{ x ? \
HAL_GPIO_WritePin(OV_FLASH_GPIO_PORT, OV_FLASH_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(OV_FLASH_GPIO_PORT, OV_FLASH_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* 闪光灯控制信号 */
#define Image_FlipVer 1 /* 图像垂直翻转使能 1;使能 0:失能(使用ATK-OV2640模组版本必须使能) */
/* OV2640的ID和访问地址 */
#define OV2640_MID 0x7FA2
#define OV2640_PID 0x2642
#define OV2640_ADDR 0x60 /* OV2640的IIC地址 */
/* 当选择DSP地址(0xFF=0x00)时,OV2640的DSP寄存器地址映射表 */
#define OV2640_DSP_R_BYPASS 0x05
#define OV2640_DSP_Qs 0x44
#define OV2640_DSP_CTRL 0x50
#define OV2640_DSP_HSIZE1 0x51
#define OV2640_DSP_VSIZE1 0x52
#define OV2640_DSP_XOFFL 0x53
#define OV2640_DSP_YOFFL 0x54
#define OV2640_DSP_VHYX 0x55
#define OV2640_DSP_DPRP 0x56
#define OV2640_DSP_TEST 0x57
#define OV2640_DSP_ZMOW 0x5A
#define OV2640_DSP_ZMOH 0x5B
#define OV2640_DSP_ZMHH 0x5C
#define OV2640_DSP_BPADDR 0x7C
#define OV2640_DSP_BPDATA 0x7D
#define OV2640_DSP_CTRL2 0x86
#define OV2640_DSP_CTRL3 0x87
#define OV2640_DSP_SIZEL 0x8C
#define OV2640_DSP_HSIZE2 0xC0
#define OV2640_DSP_VSIZE2 0xC1
#define OV2640_DSP_CTRL0 0xC2
#define OV2640_DSP_CTRL1 0xC3
#define OV2640_DSP_R_DVP_SP 0xD3
#define OV2640_DSP_IMAGE_MODE 0xDA
#define OV2640_DSP_RESET 0xE0
#define OV2640_DSP_MS_SP 0xF0
#define OV2640_DSP_SS_ID 0x7F
#define OV2640_DSP_SS_CTRL 0xF8
#define OV2640_DSP_MC_BIST 0xF9
#define OV2640_DSP_MC_AL 0xFA
#define OV2640_DSP_MC_AH 0xFB
#define OV2640_DSP_MC_D 0xFC
#define OV2640_DSP_P_STATUS 0xFE
#define OV2640_DSP_RA_DLMT 0xFF
/* 当选择传感器地址(0xFF=0x01)时,OV2640的DSP寄存器地址映射表 */
#define OV2640_SENSOR_GAIN 0x00
#define OV2640_SENSOR_COM1 0x03
#define OV2640_SENSOR_REG04 0x04
#define OV2640_SENSOR_REG08 0x08
#define OV2640_SENSOR_COM2 0x09
#define OV2640_SENSOR_PIDH 0x0A
#define OV2640_SENSOR_PIDL 0x0B
#define OV2640_SENSOR_COM3 0x0C
#define OV2640_SENSOR_COM4 0x0D
#define OV2640_SENSOR_AEC 0x10
#define OV2640_SENSOR_CLKRC 0x11
#define OV2640_SENSOR_COM7 0x12
#define OV2640_SENSOR_COM8 0x13
#define OV2640_SENSOR_COM9 0x14
#define OV2640_SENSOR_COM10 0x15
#define OV2640_SENSOR_HREFST 0x17
#define OV2640_SENSOR_HREFEND 0x18
#define OV2640_SENSOR_VSTART 0x19
#define OV2640_SENSOR_VEND 0x1A
#define OV2640_SENSOR_MIDH 0x1C
#define OV2640_SENSOR_MIDL 0x1D
#define OV2640_SENSOR_AEW 0x24
#define OV2640_SENSOR_AEB 0x25
#define OV2640_SENSOR_W 0x26
#define OV2640_SENSOR_REG2A 0x2A
#define OV2640_SENSOR_FRARL 0x2B
#define OV2640_SENSOR_ADDVSL 0x2D
#define OV2640_SENSOR_ADDVHS 0x2E
#define OV2640_SENSOR_YAVG 0x2F
#define OV2640_SENSOR_REG32 0x32
#define OV2640_SENSOR_ARCOM2 0x34
#define OV2640_SENSOR_REG45 0x45
#define OV2640_SENSOR_FLL 0x46
#define OV2640_SENSOR_FLH 0x47
#define OV2640_SENSOR_COM19 0x48
#define OV2640_SENSOR_ZOOMS 0x49
#define OV2640_SENSOR_COM22 0x4B
#define OV2640_SENSOR_COM25 0x4E
#define OV2640_SENSOR_BD50 0x4F
#define OV2640_SENSOR_BD60 0x50
#define OV2640_SENSOR_REG5D 0x5D
#define OV2640_SENSOR_REG5E 0x5E
#define OV2640_SENSOR_REG5F 0x5F
#define OV2640_SENSOR_REG60 0x60
#define OV2640_SENSOR_HISTO_LOW 0x61
#define OV2640_SENSOR_HISTO_HIGH 0x62
/* 对外接口函数 */
uint8_t ov2640_read_reg(uint16_t reg);
uint8_t ov2640_write_reg(uint16_t reg, uint8_t data);
uint8_t ov2640_init(void);
void ov2640_jpeg_mode(void);
void ov2640_rgb565_mode(void);
void ov2640_auto_exposure(uint8_t level);
void ov2640_light_mode(uint8_t mode);
void ov2640_color_saturation(uint8_t sat);
void ov2640_brightness(uint8_t bright);
void ov2640_contrast(uint8_t contrast);
void ov2640_special_effects(uint8_t eft);
void ov2640_window_set(uint16_t sx, uint16_t sy, uint16_t width, uint16_t height);
uint8_t ov2640_outsize_set(uint16_t width, uint16_t height);
uint8_t ov2640_image_win_set(uint16_t offx, uint16_t offy, uint16_t width, uint16_t height);
uint8_t ov2640_image_window_set(uint16_t offx, uint16_t offy, uint16_t width, uint16_t height);
uint8_t ov2640_imagesize_set(uint16_t width, uint16_t height);
void ov2640_flash_extctrl(uint8_t sw);
void ov2640_flash_intctrl(void);
#endif
sccb.c
#include "sccb.h"
#include "tim.h"
/**
* @brief 初始化SCCB
* @param SCCB_SCL-PD6(推挽输出)
* @retval SCCB_SDA-PD7(SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平)
*/
void sccb_init(void) {
sccb_stop(); /* 停止总线上所有设备 */
}
/**
* @brief SCCB延时函数,用于控制IIC读写速度
* @param 无
* @retval 无
*/
static void sccb_delay(void) {
delay_us(50);
}
/**
* @brief 产生SCCB起始信号
* @param 无
* @retval 无
*/
void sccb_start(void) {
SCCB_SDA(1);
SCCB_SCL(1);
sccb_delay();
SCCB_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */
sccb_delay();
SCCB_SCL(0); /* 钳住SCCB总线,准备发送或接收数据 */
}
/**
* @brief 产生SCCB停止信号
* @param 无
* @retval 无
*/
void sccb_stop(void) {
SCCB_SDA(0); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */
sccb_delay();
SCCB_SCL(1);
sccb_delay();
SCCB_SDA(1); /* 发送SCCB总线结束信号 */
sccb_delay();
}
/**
* @brief 不产生ACK应答
* @param 无
* @retval 无
*/
void sccb_nack(void) {
sccb_delay();
SCCB_SDA(1); /* SCL 0 -> 1 时 SDA = 1, 表示不应答 */
SCCB_SCL(1);
sccb_delay();
SCCB_SCL(0); /* 产生一个时钟 */
sccb_delay();
SCCB_SDA(0);
sccb_delay();
}
/**
* @brief SCCB 发送一个字节
* @param data: 要发送的数据
* @retval res
*/
uint8_t sccb_send_byte(uint8_t data) {
uint8_t t, res;
for (t = 0; t < 8; t++) {
SCCB_SDA((data & 0x80) >> 7); /* 高位先发送 */
sccb_delay();
SCCB_SCL(1);
sccb_delay();
SCCB_SCL(0);
data <<= 1; /* 左移1位,用于下一次发送 */
}
#if OV_SCCB_TYPE_NOD
SCCB_SDA_IN(); /* 设置SDA为输入 */
sccb_delay();
#endif
SCCB_SDA(1); /* 发送完成, 主机释放SDA线 */
sccb_delay();
SCCB_SCL(1); /* 接收第九位,以判断是否发送成功 */
sccb_delay();
if (SCCB_READ_SDA) {
res = 1; /* SDA=1发送失败,返回1 */
} else {
res = 0; /* SDA=0发送成功,返回0 */
}
SCCB_SCL(0);
#if OV_SCCB_TYPE_NOD
SCCB_SDA_OUT(); /* 设置SDA为输出 */
delay_us(50);
#endif
return res;
}
/**
* @brief SCCB 读取一个字节
* @param 无
* @retval 读取到的数据
*/
uint8_t sccb_read_byte(void) {
uint8_t i, receive = 0;
#if OV_SCCB_TYPE_NOD
SCCB_SDA_IN(); /* 设置SDA为输入 */
delay_us(50);
#endif
for (i = 0; i < 8; i++) /* 接收1个字节数据 */
{
sccb_delay();
receive <<= 1; /* 高位先输出,所以先收到的数据位要左移 */
SCCB_SCL(1);
if (SCCB_READ_SDA) {
receive++;
}
sccb_delay();
SCCB_SCL(0);
}
#if OV_SCCB_TYPE_NOD
SCCB_SDA_OUT(); /* 设置SDA为输出 */
delay_us(50);
#endif
return receive;
}
sccb.h
#ifndef __SCCB_H
#define __SCCB_H
#include "main.h"
/******************************************************************************************/
/* 引脚 定义 */
#define SCCB_SCL_GPIO_PORT GPIOD
#define SCCB_SCL_GPIO_PIN GPIO_PIN_6
#define SCCB_SCL_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOD_CLK_ENABLE(); }while(0) /* PD口时钟使能 */
#define SCCB_SDA_GPIO_PORT GPIOD
#define SCCB_SDA_GPIO_PIN GPIO_PIN_7
#define SCCB_SDA_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOG_CLK_ENABLE(); }while(0) /* PG口时钟使能 */
#define OV_SCCB_TYPE_NOD 0 /* 如果不用开漏模式或SCCB上无上拉电阻,我们需要推挽和输入切换的方式 */
#if OV_SCCB_TYPE_NOD
#define SCCB_SDA_IN() { GPIOD->MODER &= ~(3 << (7 * 2)); GPIOD->MODER |= 0 << (7 * 2); } /* PD7 输入 */
#define SCCB_SDA_OUT() { GPIOD->MODER &= ~(3 << (7 * 2)); GPIOD->MODER |= 1 << (7 * 2); } /* PD7 输出 */
#endif
/******************************************************************************************/
/* IO操作函数 */
#define SCCB_SCL(x) do{ x ? \
HAL_GPIO_WritePin(SCCB_SCL_GPIO_PORT, SCCB_SCL_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(SCCB_SCL_GPIO_PORT, SCCB_SCL_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SCL */
#define SCCB_SDA(x) do{ x ? \
HAL_GPIO_WritePin(SCCB_SDA_GPIO_PORT, SCCB_SDA_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(SCCB_SDA_GPIO_PORT, SCCB_SDA_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SDA */
#define SCCB_READ_SDA HAL_GPIO_ReadPin(SCCB_SDA_GPIO_PORT, SCCB_SDA_GPIO_PIN) /* 读取SDA */
/* 对外接口函数 */
void sccb_init(void);
void sccb_stop(void);
void sccb_start(void);
void sccb_nack(void);
uint8_t sccb_read_byte(void);
uint8_t sccb_send_byte(uint8_t data);
#endif
tim.c
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim9;
/* TIM1 init function */
void MX_TIM1_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 6720-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 250-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
__HAL_TIM_DISABLE_OCxPRELOAD(&htim1, TIM_CHANNEL_1);
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim1);
}
/* TIM9 init function */
void MX_TIM9_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
htim9.Instance = TIM9;
htim9.Init.Prescaler = 168-1;
htim9.Init.CounterMode = TIM_COUNTERMODE_UP;
htim9.Init.Period = 65535;
htim9.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim9.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim9) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim9, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* TIM1 clock enable */
__HAL_RCC_TIM1_CLK_ENABLE();
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM9)
{
/* USER CODE BEGIN TIM9_MspInit 0 */
/* USER CODE END TIM9_MspInit 0 */
/* TIM9 clock enable */
__HAL_RCC_TIM9_CLK_ENABLE();
/* USER CODE BEGIN TIM9_MspInit 1 */
/* USER CODE END TIM9_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspPostInit 0 */
/* USER CODE END TIM1_MspPostInit 0 */
__HAL_RCC_GPIOE_CLK_ENABLE();
/**TIM1 GPIO Configuration
PE9 ------> TIM1_CH1
PE11 ------> TIM1_CH2
PE13 ------> TIM1_CH3
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_11|GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/* USER CODE BEGIN TIM1_MspPostInit 1 */
/* USER CODE END TIM1_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspDeInit 0 */
/* USER CODE END TIM1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM1_CLK_DISABLE();
/* USER CODE BEGIN TIM1_MspDeInit 1 */
/* USER CODE END TIM1_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM9)
{
/* USER CODE BEGIN TIM9_MspDeInit 0 */
/* USER CODE END TIM9_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM9_CLK_DISABLE();
/* USER CODE BEGIN TIM9_MspDeInit 1 */
/* USER CODE END TIM9_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void delay_us(uint16_t us) {
uint16_t differ = 0xffff - us - 5;
//设定TIM9计数器起始值
__HAL_TIM_SET_COUNTER(&htim9, differ);
//启动定时器
HAL_TIM_Base_Start(&htim9);
while (differ < 0xffff - 5) {
//查询计数器的计数值
differ = __HAL_TIM_GET_COUNTER(&htim9);
}
HAL_TIM_Base_Stop(&htim9);
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
tim.h
/**
******************************************************************************
* @file tim.h
* @brief This file contains all the function prototypes for
* the tim.c file
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __TIM_H__
#define __TIM_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern TIM_HandleTypeDef htim1;
extern TIM_HandleTypeDef htim9;
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
void MX_TIM1_Init(void);
void MX_TIM9_Init(void);
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim);
/* USER CODE BEGIN Prototypes */
void delay_us(uint16_t us);
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __TIM_H__ */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
dcmi.c
/* USER CODE BEGIN 1 */
void dcmi_start(void) {
__HAL_DMA_ENABLE(&hdma_dcmi); /* 使能DMA */
DCMI->CR |= DCMI_CR_CAPTURE; /* DCMI捕获使能 */
}
void dcmi_stop(void) {
DCMI->CR &= ~(DCMI_CR_CAPTURE); /* DCMI捕获关闭 */
while (DCMI->CR & 0X01); /* 等待传输结束 */
__HAL_DMA_DISABLE(&hdma_dcmi); /* 关闭DMA */
}
/* USER CODE END 1 */
stm32f4_it.c
#include <stdio.h>
#include <example.h>
void DCMI_IRQHandler(void)
{
/* USER CODE BEGIN DCMI_IRQn 0 */
__HAL_DCMI_CLEAR_FLAG(&hdcmi, DCMI_FLAG_FRAMERI);//清除帧中断
jpeg_data_process();//jpeg数据处理
/* USER CODE END DCMI_IRQn 0 */
HAL_DCMI_IRQHandler(&hdcmi);
/* USER CODE BEGIN DCMI_IRQn 1 */
/* USER CODE END DCMI_IRQn 1 */
}
example.c
#include "example.h"
#include "ov2640.h"
#include "dcmi.h"
uint8_t ov2640_mode = 1; //工作模式:0,RGB565模式;1,JPEG模式
#define jpeg_buf_size 30*1024 //定义JPEG数据缓存jpeg_buf的大小(*4字节)
__ALIGNED(4) uint32_t jpeg_buf[jpeg_buf_size]; //JPEG数据缓存buf
volatile uint32_t jpeg_data_len = 0; //buf中的JPEG有效数据长度
volatile uint8_t jpeg_data_ok = 0; //JPEG数据采集完成标志
const char *EFFECTS_TBL[7] = {"Normal", "Negative", "B&W", "Redish", "Greenish", "Bluish", "Antique"}; /* 7种特效 */
const char *JPEG_SIZE_TBL[13] = {"QQVGA", "QCIF", "QVGA", "WGVGA", "CIF", "VGA", "SVGA", "XGA", "WXGA", "SVGA", "WXGA+",
"SXGA", "UXGA"}; /* JPEG图片 13种尺寸 */
const uint16_t jpeg_img_size_tbl[][2] =
{
160, 120, /* QQVGA */
176, 144, /* QCIF */
320, 240, /* QVGA */
400, 240, /* WGVGA */
352, 288, /* CIF */
640, 480, /* VGA */
800, 600, /* SVGA */
1024, 768, /* XGA */
1280, 800, /* WXGA */
1280, 960, /* XVGA */
1440, 900, /* WXGA+ */
1280, 1024, /* SXGA */
1600, 1200, /* UXGA */
};
void jpeg_data_process(void) {
if (ov2640_mode)//只有在JPEG格式下,才需要做处理.
{
if (jpeg_data_ok == 0) //jpeg数据还未采集完?
{
__HAL_DMA_DISABLE(&hdma_dcmi);//关闭DMA
while (DMA2_Stream1->CR & 0X01); //等待DMA2_Stream1可配置
jpeg_data_len = jpeg_buf_size - __HAL_DMA_GET_COUNTER(&hdma_dcmi);//得到剩余数据长度
jpeg_data_ok = 1; //标记JPEG数据采集完按成,等待其他函数处理
}
if (jpeg_data_ok == 2) //上一次的jpeg数据已经被处理了
{
__HAL_DMA_SET_COUNTER(&hdma_dcmi, jpeg_buf_size);//传输长度为jpeg_buf_size*4字节
__HAL_DMA_ENABLE(&hdma_dcmi); //打开DMA
jpeg_data_ok = 0; //标记数据未采集
}
}
}
extern void dcmi_start(void);
void jpeg_test(void) {
uint32_t i;
uint8_t *p;
uint8_t effect = 0, saturation = 2, contrast = 2;
uint8_t size = 2; //默认是QVGA 320*240尺寸
uint8_t msgbuf[15]; //消息缓存区
// delay_init(168);
while (ov2640_init()); /* 初始化OV2640 */
ov2640_jpeg_mode(); /* JPEG模式 */
ov2640_contrast(contrast);//对比度
ov2640_color_saturation(saturation);//饱和度
ov2640_special_effects(effect);//设置特效
ov2640_outsize_set(jpeg_img_size_tbl[size][0], jpeg_img_size_tbl[size][1]);//设置输出尺寸
HAL_DMA_Start(&hdma_dcmi, (uint32_t) &DCMI->DR, (uint32_t) &jpeg_buf, jpeg_buf_size);
dcmi_start();
while (1) {
if (jpeg_data_ok == 1) //已经采集完一帧图像了
{
p = (uint8_t *) jpeg_buf;
for (i = 0; i < jpeg_data_len * 4; i++) //dma传输1次等于4字节,所以乘以4.
{
while ((USART3->SR & 0X40) == 0); //循环发送,直到发送完毕
USART3->DR = p[i];
}
jpeg_data_ok = 2; //标记jpeg数据处理完了,可以让DMA去采集下一帧了.
}
}
}
example.h
#ifndef F407_OV2640_EXAMPLE_H
#define F407_OV2640_EXAMPLE_H
void jpeg_data_process(void);
void jpeg_test(void);
#endif
usart.c
/* USER CODE BEGIN 1 */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE {
HAL_UART_Transmit(&huart1, (uint8_t *) &ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 1 */
usart.h
#include "stdio.h"
main.c
/* USER CODE BEGIN Header */
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "dcmi.h"
#include "dma.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "example.h"
#include "ov2640.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_TIM1_Init();
MX_USART1_UART_Init();
MX_DCMI_Init();
MX_USART3_UART_Init();
MX_TIM9_Init();
/* USER CODE BEGIN 2 */
DCMI->IER = 0x0;//函数HAL_DCMI_Init()会默认打开很多中断,不处理会有各种问题,因此关闭所有,只打开需要的
__HAL_DCMI_ENABLE_IT(&hdcmi, DCMI_IT_FRAME); //开启帧中断
__HAL_DCMI_ENABLE(&hdcmi);
jpeg_test();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
三、效果
对应串口1:
串口3

















 1640
1640











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









