






太原理工大学计算机控制技术实验之最少拍控制器
实验原理
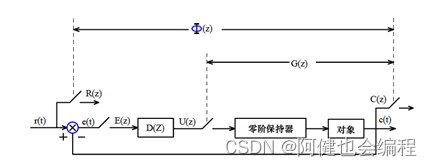
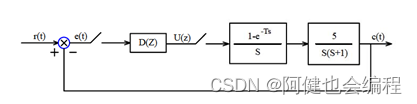
典型的最小拍控制系统如图所示,其中 D(Z)为数字调节器,G(Z)为包括零阶保持器在内的广义对象的Z 传递函数,φZ为闭环Z传递函数,C(Z)为输出信号 Z 的传递函数。R(Z)为输入信号的 Z 传递函数。
1. 最小拍有纹波系统设计
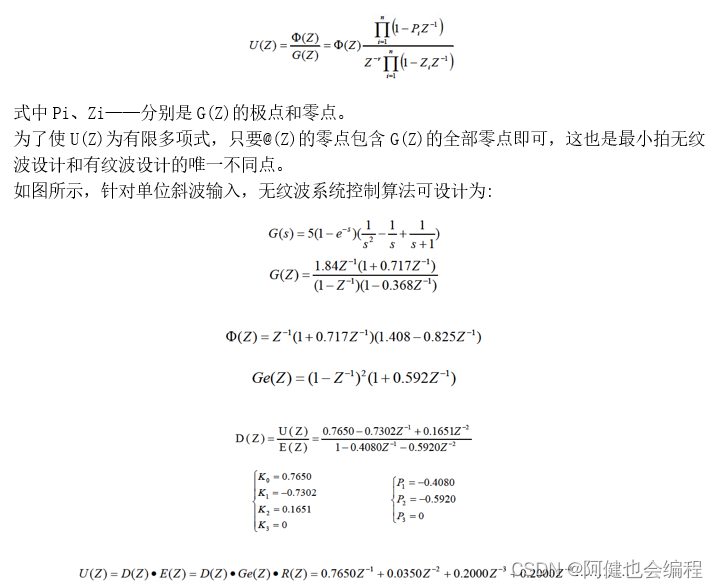
最小拍无纹波控制系统
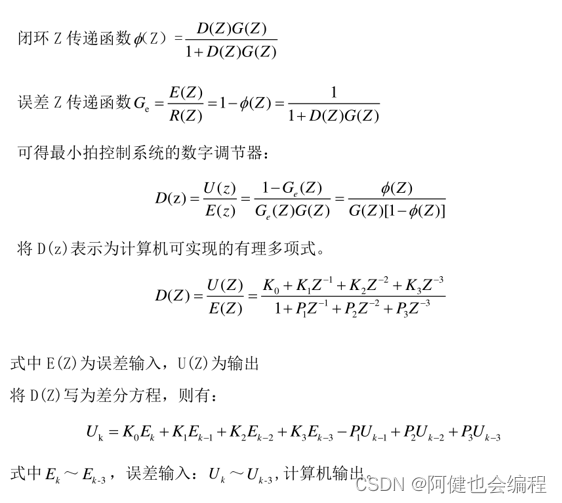
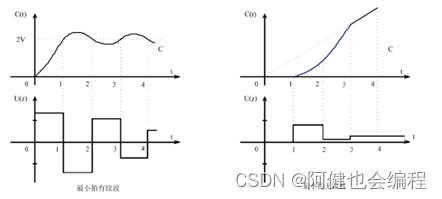
有纹波系统虽然在采样点上的误差为零,但不能保证采样点之间的误差也为零,因此存在纹波现象。无纹波系统设计只要使 U(Z)是z^(-1)的有限多项式,则可以保证系统输出无纹波。即
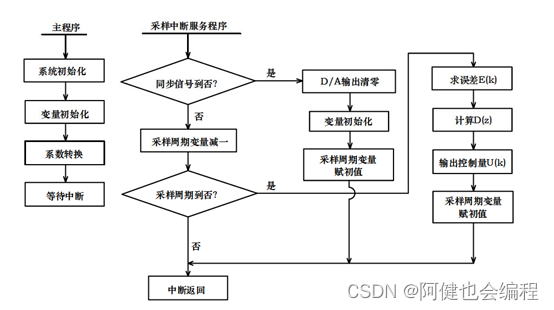
3.实验程序流程图
实验内容
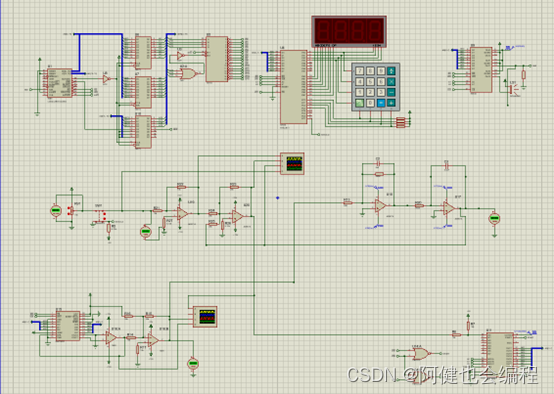
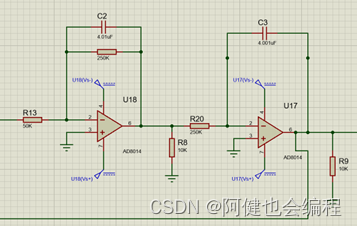
1.线路接线图
实验程序
VOID main (VOID)
//Initialise our variables and call the
//Assembly routine to initialise the LCD display.
{
char aa,bb;
int A,B,C,D;
TC = 1;
UK=UK_1=UK_2=UK_3=0;
EK=EK_1=EK_2=EK_3=0;
Sample_Mark = 0;
outp(IO4,0x80); //DA转换器清零
initialise(); // Initialize the LCD
while(1) {
Step_mark = inp(ADR_PPI_PORTC) & 0x80; //读取开关位置
if (Step_mark > 0){
calc_display(calc_decascii(1)); //显示1,表示没有给阶跃信号
UK=UK_1=UK_2=UK_3=0;
EK=EK_1=EK_2=EK_3=0;
outp(IO4,0x80);
TC=0x01;
}
else {
calc_display(calc_decascii(8)); //显示8,表示有给阶跃信号,开始控制
/* ********************************************************** */
if (Sample_Mark == 1)
{
Sample_Mark = 0; //清除采样标志
TC--;
if(TC==0)
{
EZ=UZ=0;
outp(IO5,1); //启动AD转换器
td_delay(20); //延时
AD_Result=inp(IO5)-128; //读AD转换结果
EK=AD_Result;
A = xyz(EK,K0,10000);
B = xyz(EK_1,K1,10000);
C = xyz(EK_2,K2,10000);
D = xyz(EK_3,K3,10000);
EZ = A+B+C+D; //EZ=(EK*K0+K1*EK_1+K2*EK_2+K3*EK_3)/10000;
A = xyz(UK_1,P1,10000);
B = xyz(UK_2,P2,10000);
C = xyz(UK_3,P3,10000);
UZ = A+B+C; //UZ=(P1*UK_1+P2*UK_2+P3*UK_3)/10000;
UK = EZ-UZ;
bb = UK;
outp(IO4,bb+128); //控制指令输出
UK_3 = UK_2;
UK_2 = UK_1;
UK_1 = UK;
EK_3 = EK_2;
EK_2 = EK_1;
EK_1 = EK;
TC = TK;
}
}
/* ********************************************************** */
}
}
}
实验结果
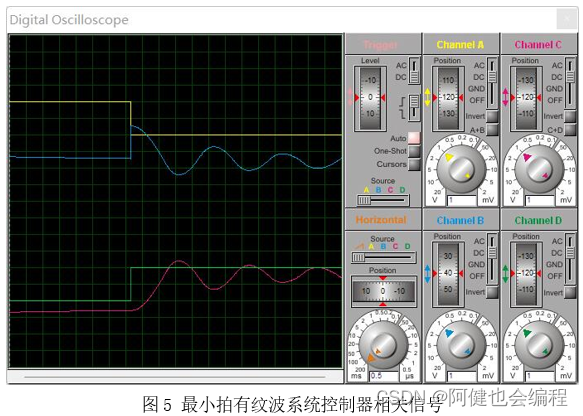
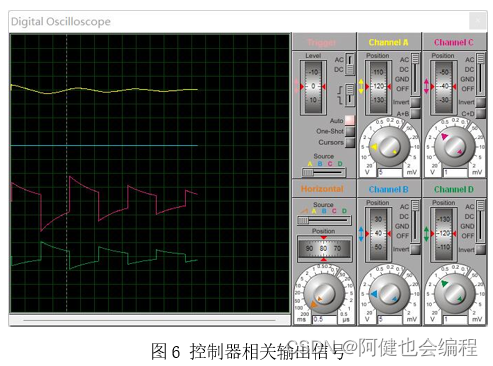
1.最小拍有纹波系统
黄线:反相后的阶跃信号
蓝线:偏差信号
红色:输出信号
绿线:给定阶跃信号
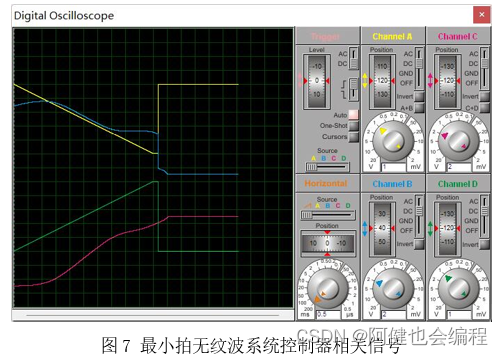
 黄线:偏差信号
黄线:偏差信号
蓝线:无信号
红色:控制器的双极性输出
绿线:控制器的单极性输出
2.最小拍无纹波系统
3.结果分析
最小拍控制系统的设计方法是简便的,结构也是简单的,设计结果可以得到解析解,便于计算机实现。但是最小拍设计存在如下一些问题:
1)最小拍控制系统对输入形式的适应性差,当系统的输入形式改变,尤其是存在随机扰动时,系统的性能变坏。
2)最小拍控制系统对参数的变化很敏感,在实验过程中,随着外部条件的变化,对象参数的变化是不可避免的,以及计算机在计算过程中产生的误差,从而使得实际输出可能偏离期望值。
这也就是在做最小拍设计实验时常常得不到预期效果的原因。
思考题
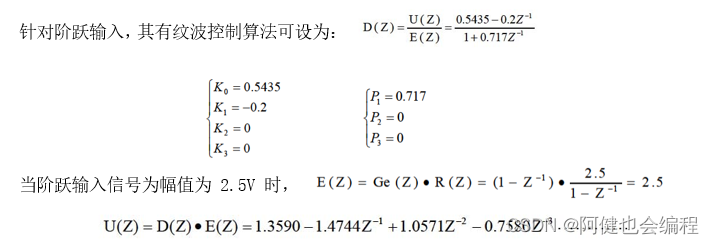
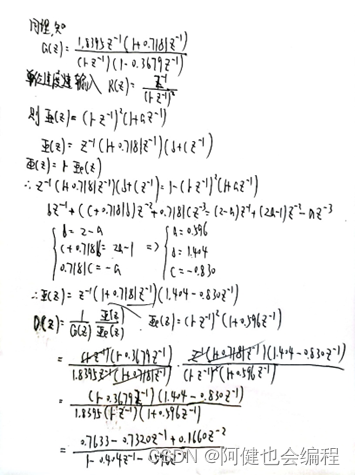
1) 试根据给定的对象参数,求出单位阶跃输入下的有纹波控制器,要求有详细的求解过程。

2) 试根据给定的对象参数,求出单位速度输入下的无纹波控制器,要求有详细的求解过程。
3) 如何验证最少拍控制器对对象参数变化敏感,说出你设想的验证方法。实验中是使用一些电子器件构建被控对象,则改变电阻电容的值,就等于改了被控对象参数,对象传函就改变了,重复实验,看输出波形的变化。
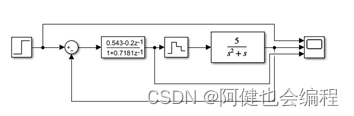
4) 利用Matlab求出上述两个控制器,并进行仿真,与实验结果进行对比分析。
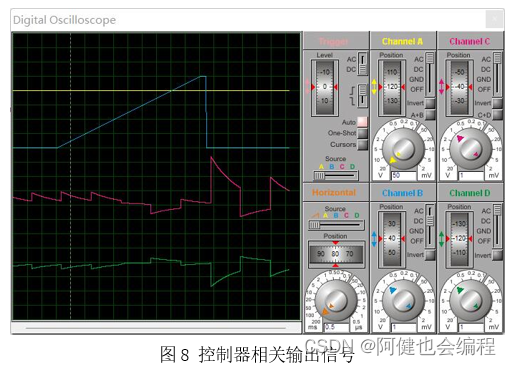
- 有纹波控制器
黄线:给定阶跃信号
蓝线:系统输出信号
红色:控制器输出信号
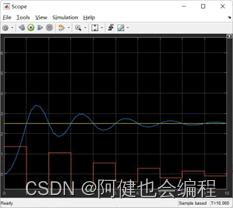
2. 无纹波控制器

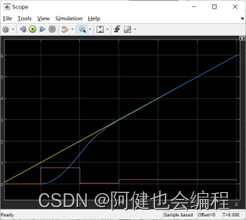
Matlab仿真结果与理想预期结果高度吻合。
5) 在实验过程中采样周期T的影响与PID控制中采样周期T的影响有何不同?
采样周期T越小,越能够复现被控对象的连续函数和连续控制器,但是周期过短会产生放大采样噪声和量化噪声。
在PID控制中,采样周期越小,采样值越能反映模拟量的变化情况,但是变量变化过小,会造成微分部分接近为零。


















 1096
1096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











