







数据集介绍
DAIR-V2X 数据集是第一个来自 VICAD 真实场景的大规模、多模态、多视图数据集,用于加速车辆-基础设施协同自动驾驶 (VICAD) 的计算机视觉研究和创新。
DAIR-V2X 包含
- 71254 个 Li-DAR 帧
- 71254 个相机帧
引入了车辆-基础设施协作 3D 对象检测问题 (VIC3D),制定了使用来自车辆和基础设施的感官输入协同定位和识别 3D 对象的问题。
除了解决传统的 3D 物体检测问题外,VIC3D 的解决方案还需要考虑车辆和基础设施传感器之间的时间异步问题以及它们之间的数据传输成本。
时间补偿后期融合(TCLF)是一种用于 VIC3D 任务的后期融合框架,作为基于 DAIR-V2X 的基准。
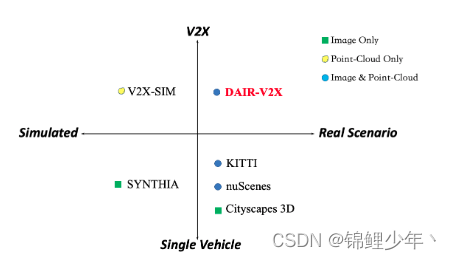
DAIR-V2X-C 由车辆和基础设施传感器捕获
DAIR-V2X-V 由车辆传感器捕获
DAIR-V2X-I 由基础设施传感器捕获
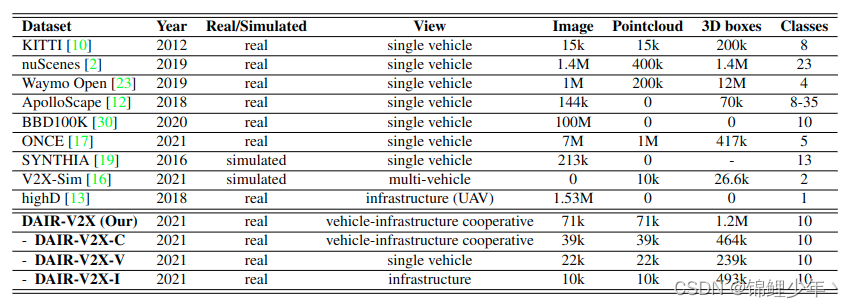
这是 VI-CAD 的第一个大规模、多模态、多视图数据集。
它包含 71254 个 LiDAR 帧和 71254 个摄像机帧,这些帧是在交叉路口场景中捕获的,在这些场景中,装备精良的车辆通过部署了基础设施传感器的交叉路口。
40% 的帧是从基础设施传感器捕获的,60% 的帧是从车辆传感器捕获的。
所有这些都由专家注释者精确标记。
该数据集涵盖 10 公里的城市道路、10 公里的高速公路、28 个十字路口和 38 平方公里的驾驶区域,具有不同的天气和照明变化。
- 该数据可能面临恶劣天气和低光照的问题。
思路:
- 重新划分数据集
- 理解各标签参数
- 尝试不同baseline
- 学习mm3d的tricks
测试 centerpoint 报错 keyerror “boxes_3d”
/media/koiboy/detection/DAIR-V2X/v2x/models/detection_models/mmdet3d_anymodel_anymodality_late.py
















 1346
1346











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









