






DAIR-V2X: A Large-Scale Dataset for Vehicle-Infrastructure Cooperative 3D Object Detection
论文地址:https://arxiv.org/abs/2204.05575 (CVPR2022)
数据地址:https://thudair.baai.ac.cn/
github:https://github.com/AIR-THU/DAIR-V2X
作者:清华大学人工智能产业研究院、清华大学计算机科学与技术系、百度、中科院
摘要
- 第一个大规模、多模式、多视角的真实场景数据集
- 数据集的困难
- 时间同步
- 空间同步
- 数据传输成本
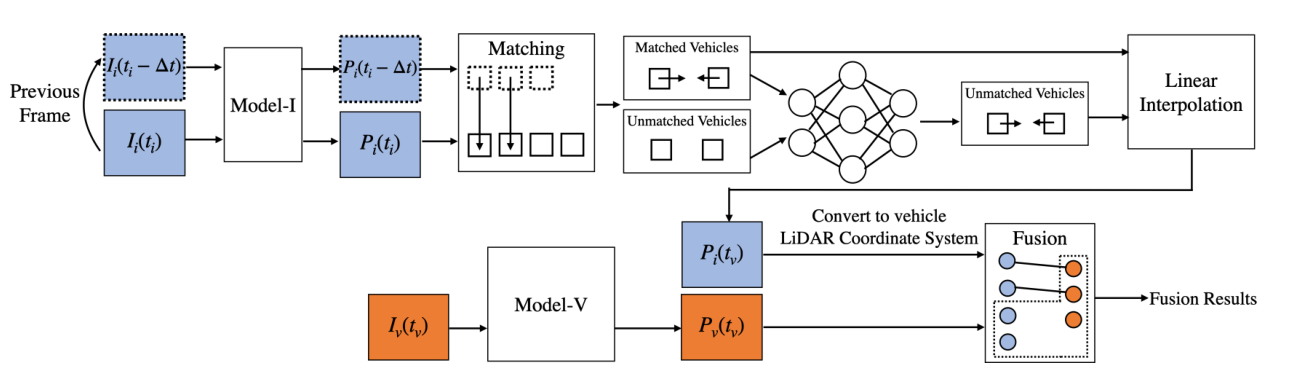
- 一个时间补偿融合框架,Time Compensation Late Fusion (TCLF)
简介
- 自动驾驶的安全挑战
- 没有全局感知
- 没有长距离感知
- 基础设备+车端设备=Level 5 自动驾驶
- 能够提供全局感知,实现视野增强,去除盲点
贡献
- 开源这个数据集
- 车路协同感知3D检测
- 证明了协同感知的有效性,并且建立了基线模型
相关工作
- 自动驾驶数据集
- 原来的数据集中没有 车路协同的数据集
- 3D目标检测
- 基于2D图像的3D检测 (ImV oxelNet)
- 基于点云的3D检测(PointPillars, SECOND, 3DSSD)
- 多模态的3D检测(点云和图像)(Point-painting and MVXNet)
- 困难点:盲点、长距离感知
- 多传感器融合
- 前期融合(early fusion)数据级融合,原始数据直接融合()
- 中期融合( intermediate fusion)特征级融合,将模型提取出来的特征进行融合()
- 后期融合(late fusion)决策级融合(本文基线采用),将模型的输出信息进行融合()
- 车路融合感知
- V2X技术在实际中的运用
DAIR-V2X数据集
- 采集设备
- 坐标系
- 数据采集
- 数据采集
- 数据标注
- 隐私保护
任务&评估
- 与传统3D目标检测相比,具有新特征
- 需要权衡速度与精度(大量原始数据传输,会导致传输代价增大,难以实现)
- 由于异步触发以及传输时间消耗,导致时空同步误差
- 时间同步误差:
- |tv − ti| ≤ 10ms 同步误差10ms
- 车路协同的3D目标检测
- 真值怎么确定?车端与路端
- 同步与异步之间的时间间隔
- 以轨迹id进行位置估计作为一个准确的位置
- 评估指标:
- 检测精度(AP) 以车为一个中心的矩形区域[0, -39.12, 100, 39.12]
- 传输代价AB (Average Byte)(传输时间花销)
基准测试
-
VIC3D object detection
-
给了一个baseline,需要学习,复现
-
Time Compensation Late Fusion (TCLF) framework
- 估计路侧端两帧之间的速度
- 估计路侧端两帧之间的状态
- 在后期进行融合
-
-
对比实验说这个3个问题
- 车路协同是比单一有效的
- 时间补偿是有效的
- 数据级融合AP>特征级融合>决策级融合
-
SV3D Detection 单个视角的目标跟踪
总结
- 提出一个大的真是车路协同数据集
- 相较于传统的3D目标检测任务,考虑到时间同步,从而传输速率需要考虑
- 提出了时间补偿网络
- 给了基线模型,方便大家比较
学习心得:
- 写作感觉通俗易懂
- 做数据很大,是填补了车路协同感知的空白,并且开源,值得好评
- 数据做了几个大的基础分析(数据级融合,特征级融合,决策级融合的AP比较)(车路协同感知与单视角感知比较)(时间同步的比较)
- 数据做得质量很高,进行时间同步了,非常值得学习
- 数据之间的传输速率,是需要考虑的重点,传感器之间的时间同步问题,也需要仔细研究。
- 依托该数据,可以做3D的目标检测与跟踪,是一个很不错的选择。
















 2388
2388











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











