







在工业自动化领域,VisionPro作为康耐视(Cognex)推出的机器视觉平台,凭借其强大的工具库和灵活的编程接口,被广泛应用于工件尺寸测量任务。本文将以工件宽度测量为例,详细解析从图像预处理到结果标注的全流程实现方法,并结合实际代码示例说明关键步骤。
一、项目概述
工件宽度测量是机器视觉的典型应用场景,需通过图像分析定位目标区域并计算其几何特征。VisionPro通过模板匹配(PMAlignTool)、坐标系重建(FixtureTool)和卡尺工具(CaliperTool)等核心工具,实现高精度动态测量,最终通过图形标签工具(CreateGraphicLabelTool)将结果实时标注在图像上。
二、实现流程与关键步骤
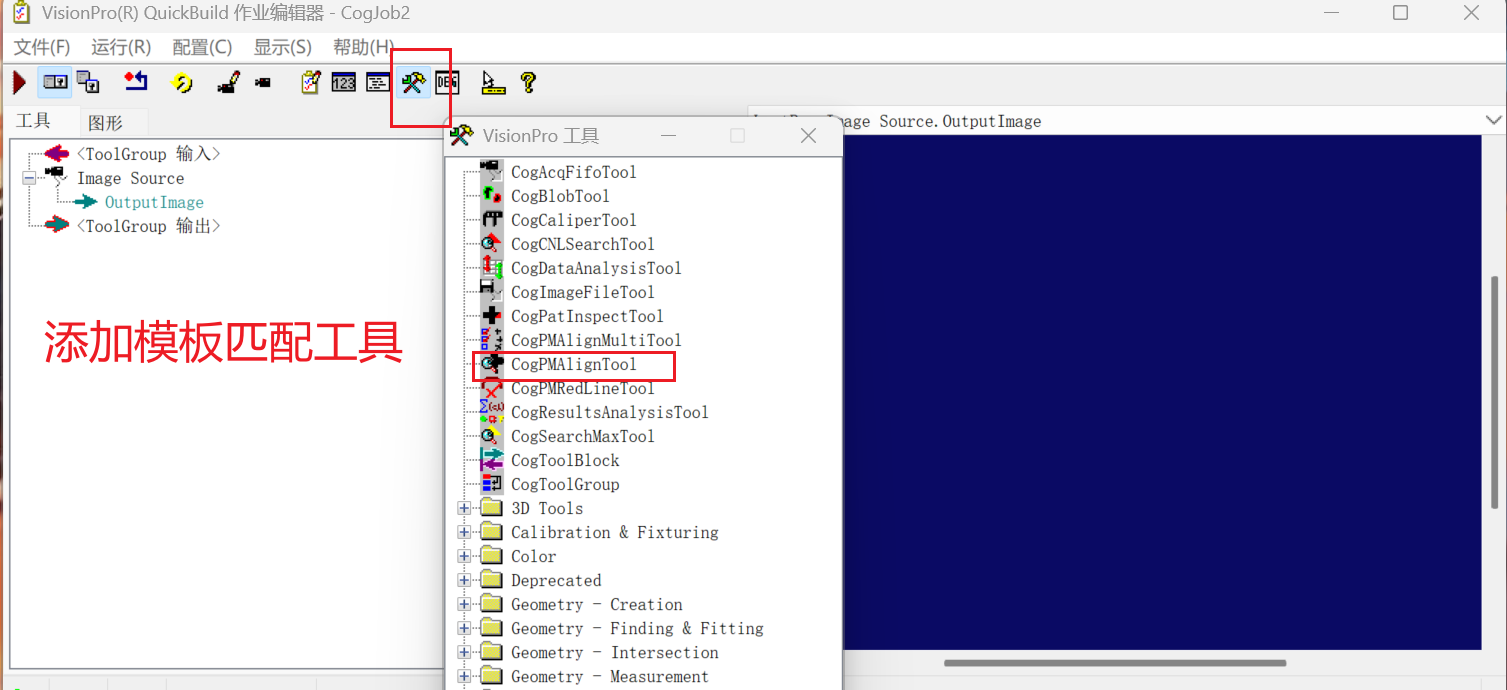
1. 模板匹配定位工件
目的:在复杂图像中快速定位工件位置,为后续测量提供坐标系基准。
工具:CogPMAlignTool
步骤:
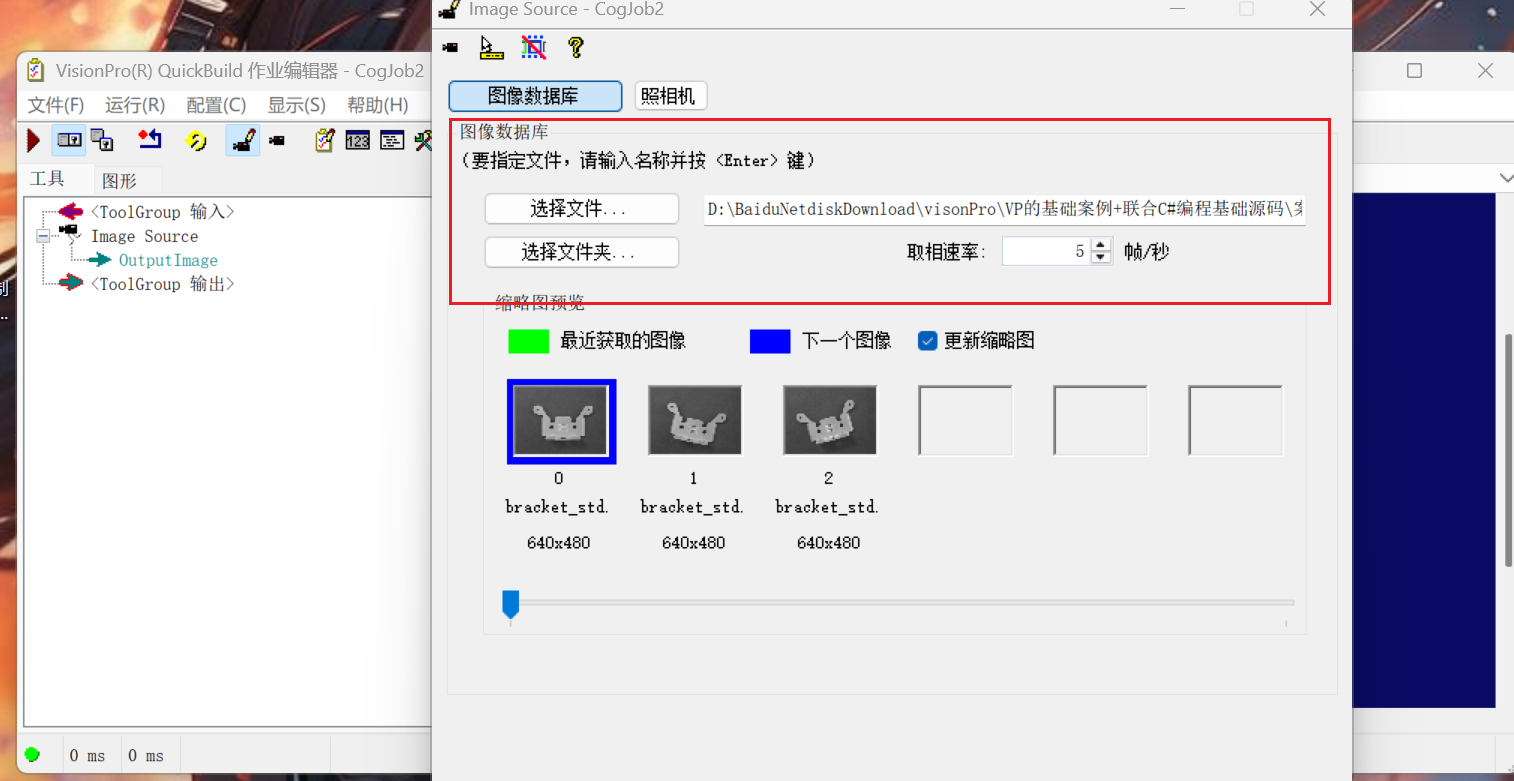
- 图像输入:加载待测工件图像,配置图像源(Image Source)并指定输入路径。
- 模板训练:框选工件区域,设置允许的旋转范围(如±180°)和缩放比例,生成匹配特征模型。
- 运行匹配:通过`CogPMAlignTool.Results.GetPose()`获取工件的位姿信息(X、Y、角度),为坐标系重建提供转换参数。
注意点:匹配精度受光照和遮挡影响,建议通过ShowFine选项检查特征点分布是否合理。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 890
890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









