







文章结尾有移植好的工程文件可以直接下载
- VL53L0X激光测距传感器
VL53L0X是 ST 公司推出的新一代 ToF 激光测距传感器,采用了第二代 FlightSenseTM技术,利用飞行时间(ToF)原理,通过光子的飞行来回时间与光速的计算,实现测距应用。较比上一代 VL6180X,新的器件将飞行时间测距长度扩展至 2 米,测量速度更快,能效更高。除此之外,为使集成度过程更加快捷方便, ST 公司为此也提供了 VL53L0X 软件 API(应用编程接口)以及完整的技术文档,通过主 IIC 接口,向应用端输出测距的数据,大大降低了开发难度。
15.1 模块来源
采购链接:
VL53L0X V2激光测距传感器模块 ToF飞行时间测距 配套光学盖片
资料下载链接:
15.2 规格参数
工作电压: 2.6 ~ 3.5 V
温度范围:2m
通信协议:I2C
I2C地址:0X52
管脚数量:6 Pin(2.54mm间距排针)
温度范围:2m
通信协议:I2C
I2C地址:0X52
管脚数量:6 Pin(2.54mm间距排针)
15.3 移植过程
我们的目标是在天空星STM32F407上能够实现测量距离的功能。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
15.3.3 查看资料
VL53L0X飞行时间测距传感器是新一代激光测距模块,VL53LOX是完全集成的传感器,配有嵌入式红外、人眼安全激光,先进的滤波器和超高速光子探测阵列,测量距离更长,速度和精度更高。
VL53L0X的感测能力可以支持各种功能,包括各种创新用户界面的手势感测或接近检测,扫地机器人、服务性机器人的障碍物探测与防撞系统,家电感应面版、笔记本电脑的用户存在检测或电源开关监控器,以及无人机和物联网(IoT)产品等。
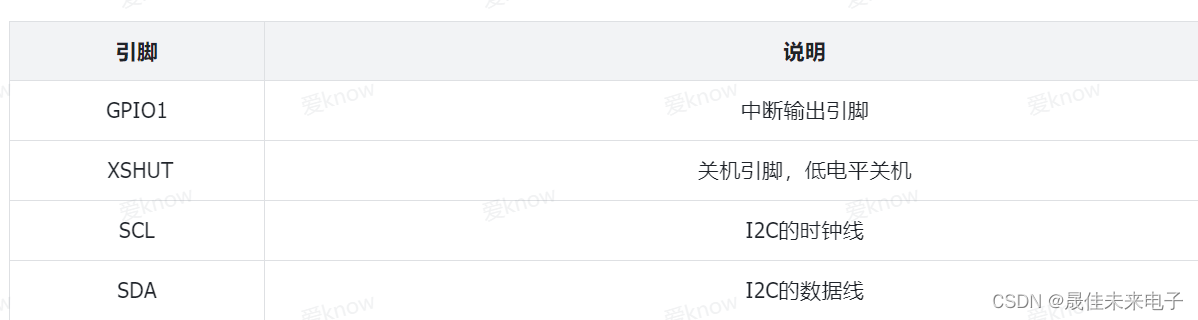
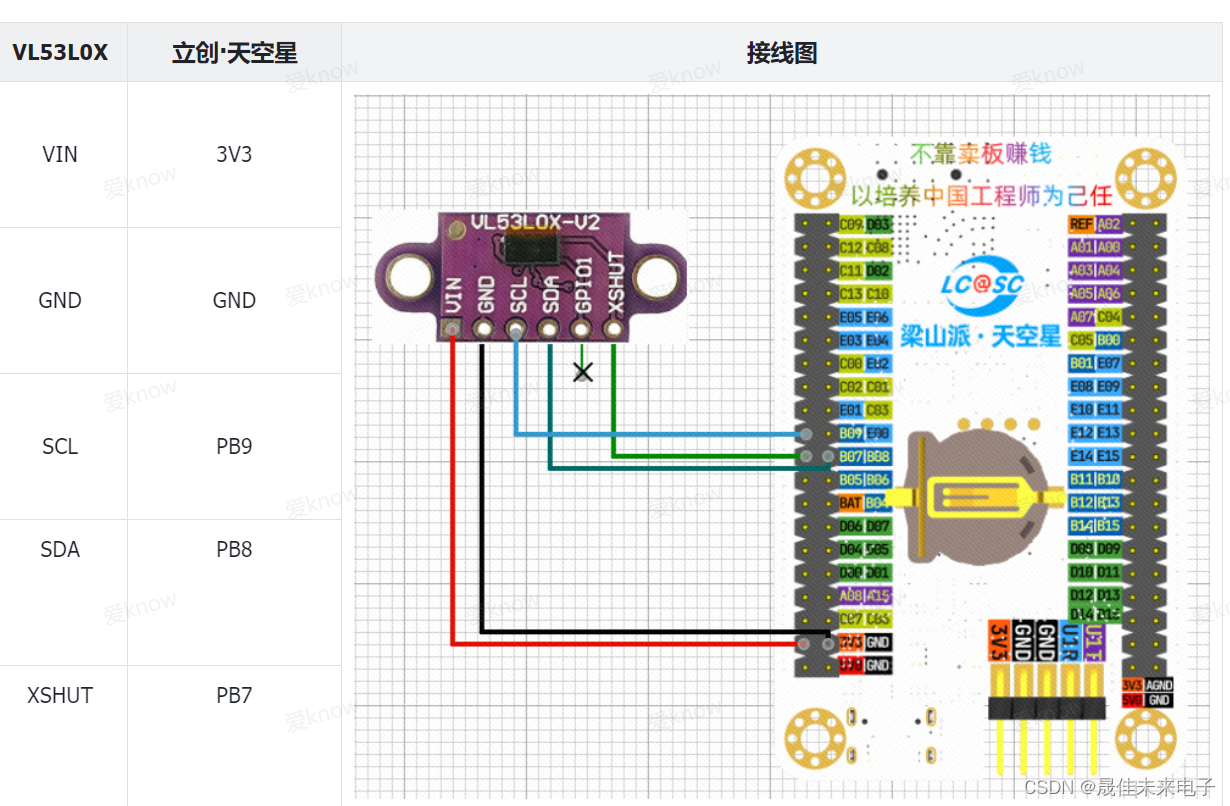
15.3.4 引脚选择
该模块有3个引脚,具体引脚连接见各引脚连接。
15.3.5 移植至工程
15.4 移植验证
在自己工程中的main主函数中,编写如下。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 立创论坛:https://oshwhub.com/forum
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*
Change Logs:
* Date Author Notes
* 2024-03-19 LCKFB-LP first version
*/
#include "board.h"
#include "bsp_uart.h"
#include <stdio.h>
#include "bsp_VL53L0X.h"
extern VL53L0X_Dev_t vl53l0x_dev;//设备I2C数据参数
int main(void)
{
board_init();
uart1_init(115200U);
uint8_t mode = 0;//0:默认;1:高精度;2:长距离;3:高速
VL53L0X_Error Status=VL53L0X_ERROR_NONE;//工作状态
printf("Start\r\n");
while(vl53l0x_init(&vl53l0x_dev))//vl53l0x初始化
{
printf("VL53L0X Error!!!\n\r");
delay_ms(500);
}
printf("VL53L0X OK\r\n");
while(vl53l0x_set_mode(&vl53l0x_dev,mode))//配置测量模式
{
printf("Mode Set Error\r\n");
delay_ms(500);
}
while(1)
{
if(Status==VL53L0X_ERROR_NONE)
{
//执行单次测距并获取测距测量数据
Status = VL53L0X_PerformSingleRangingMeasurement(&vl53l0x_dev, &vl53l0x_data);
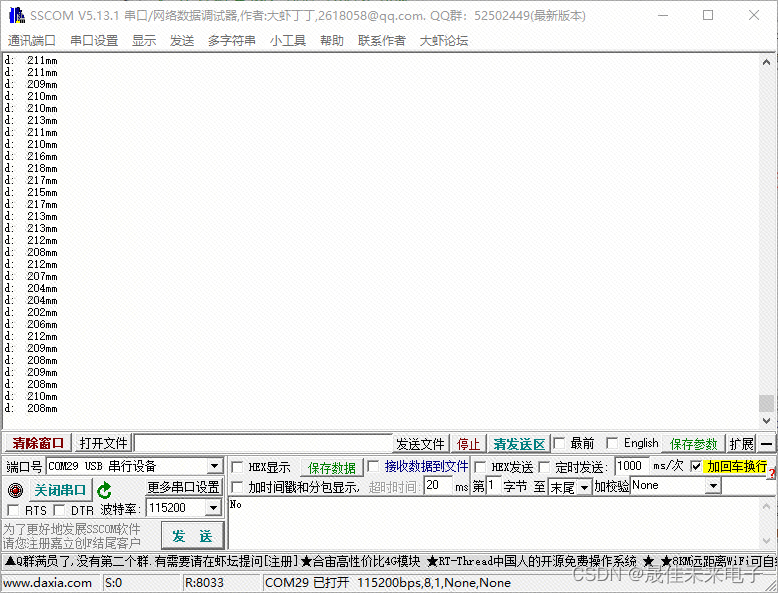
printf("d: %4imm\r\n",vl53l0x_data.RangeMilliMeter);//打印测量距离
}
else
{
printf("error\r\n");
}
delay_ms(500);
}
}
移植现象:在距离20cm处摆放障碍物,输出前方障碍物的距离。
测量时不要将模块靠近地面会影响模块,障碍物不光滑会造成一定的误差。
















 9485
9485











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











