






 本文概述了刘继宗论文中关于双目视觉原理、相机成像模型与坐标系建立、双目相机标定(张正友方法)、以及手眼标定过程,着重于机械臂定位抓取中的关键步骤。
本文概述了刘继宗论文中关于双目视觉原理、相机成像模型与坐标系建立、双目相机标定(张正友方法)、以及手眼标定过程,着重于机械臂定位抓取中的关键步骤。
说明:我的方向是跟基于视觉伺服的机械臂抓取有关,最近在看大论文,(浅浅地吐槽一句,近几年的sci为什么没有被收录,搜一个doi未收录,再搜一个又未收录),由于大论文的篇幅较长,所以我想以记录的方式记录每一小节。
论文出处:基于视觉引导的机械臂定位抓取研究与实现-刘继宗(知网可搜)
目录
注:本文是对在看论文第三章的总结,图片内容均为原作者所有。
1.双目视觉原理
物体在双眼视网膜上投影位置的差值被称为双目视差,双目视差经过大脑的 处理,可获得物体的立体信息。
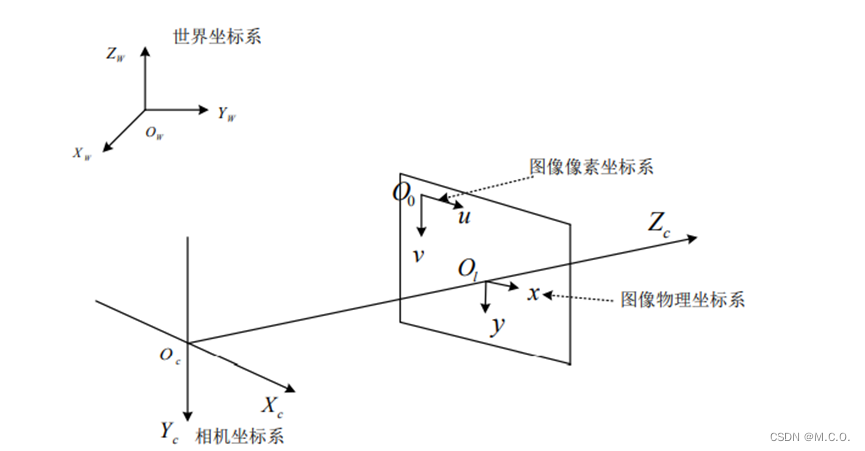
2.相机成像模型以及坐标系的建立
一般情况下,需要在针孔成像模型中定义世界坐标系、相机坐标系、像素坐标系和图像物理坐标系。
文章当中涉及到了复杂的计算我的简要总结如下:
1.首先基于相似三角形可以得到一组公式;
2.然后求解相机的内参模型;
3.最后求解相机的外参模型
4.最终得到相机成像的模型。
( 视觉系统的参数标定包含双目相机标定和手眼标定。前者是为了得到图像坐标系与相机坐标系之间的关系,后者是为获得相机坐标系与机械臂坐标系之间的关系。)
3.双目相机标定
张正友标定法:
(1)首先求解单应矩阵,单应矩阵是相机内参矩阵与相机外参矩阵的混合矩阵;
(2)将混合矩阵分离成为相机内参矩阵和相机外参矩阵,首先求解相机内参矩阵;
(3)然后求解相机外参矩阵。
4.手眼标定
手眼系统主要分为两种,一种是eye in hand(眼在手心)另外一种是eye to hand(眼在手外)。
手眼标定的原理图如下:
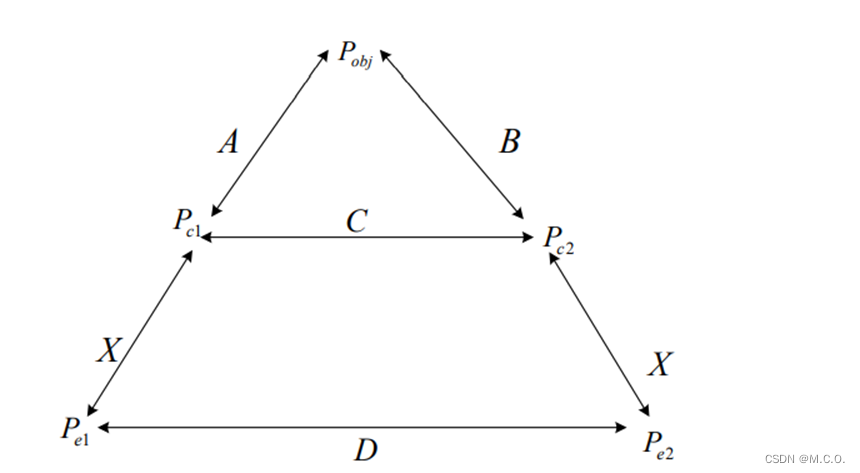
假设物体上固连的坐标系Cobj ,在手眼标定的过程中标定板 在此坐标系下的坐标为 Pobj ,机械臂运动前后的相机坐标系分别为Cc1和Cc2,标定板在Cc1和Cc2这两个坐标系下的坐标分别为Pc1和Pc2,机械臂运动前后末端坐标系分别为Ce1和Ce1标定板在Ce1和Ce2这两个坐标系下的坐标分别为Pe1和Pe2。在机械臂运动前相机坐标系和标定板坐标系的相对位置关系为A ,在机械臂运动后相机坐标系和标定板坐标系的相对位置关系为B,机械臂运动前后机械臂末端坐标系的相对位置关系为D,X用来描述手眼关系。
公式的简要总结如下:
首先我们会得到六组关系,通过公式代换以及公式改写得到齐次表达式,然后把齐次表达式展开,旋转矩阵可以改写为通用旋转变换的形式,即R(k,q ),表示绕着k轴旋转 q ,然后对旋转矩阵进行了改写,之后又进行了角度的约束,最后得到手眼关系的表达式

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









