







记录使用docker运行ros过程中遇到的问题
1、问题一:QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-root’
No protocol specified

解决:
export XDG_RUNTIME_DIR=/usr/lib/
export QT_QPA_PLATFORM='offscreen'
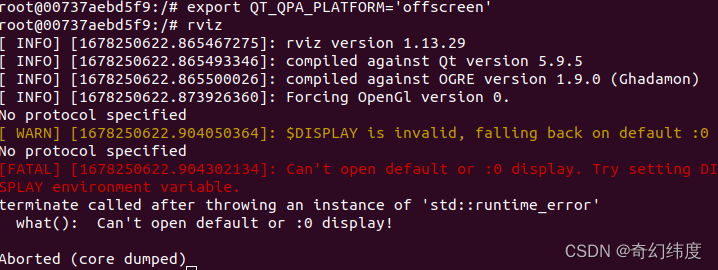
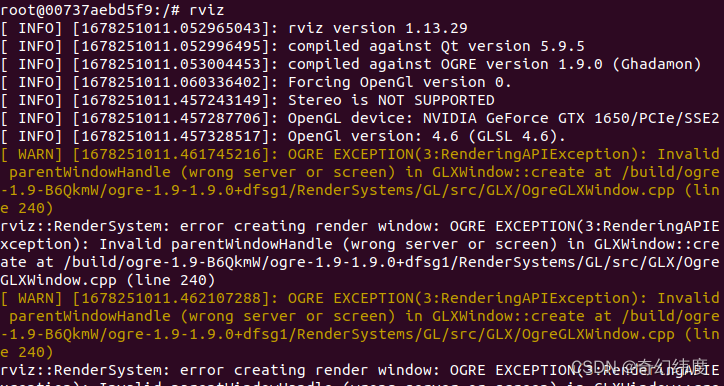
新问题:[FATAL] [1678250622.904302134]: Can’t open default or :0 display. Try setting DISPLAY environment variable.
xhost +
echo $DISPLAY
export DISPLAY=:1

最终重启docker容器,搞定
sudo systemctl restart docker
2、问题二:docker: Error response from daemon: Unknown runtime specified nvidia.

解决方式:修改/etc/docker/daemon.json文件配置内容
gedit /etc/docker/daemon.json
修改成以下内容:
{
# 加速镜像地址
"registry-mirrors": ["http://ip:8764"],
# 私服地址
"insecure-registries":["http://ip:8763"],
"runtimes": {
"nvidia": {
"path": "/usr/bin/nvidia-container-runtime",
"runtimeArgs": []
}
}
}
重启docker
sudo service docker stop
sudo service docker start
查看情况
docker info
3、问题三:

需要将/tmp/.docker.xauth文件夹删除,并创建/tmp/.docker.xauth文件
sudo rm -r /tmp/.docker.xauth
sudo touch /tmp/.docker.xauth
参卡链接:
https://blog.csdn.net/qq_40104261/article/details/118607235
https://blog.csdn.net/m0_48707860/article/details/127508479
https://blog.csdn.net/qq_35427589/article/details/124822628

















 1188
1188

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









